Keepailved详细介绍
2015-12-17 10:48
141 查看
一、Keepalived介绍
Keepalived是Linux下一个轻量级的高可用解决方案,它与Heartbeat、RoseHA实现的功能类似,都可以实现服务或者网络的高可用,单是又有差别,Heartbeat是一个专业的、功能完善的高可用软件,它提供了HA软件所需的基本功能,比如心跳检测和资源接管,监测集群中的系统服务,在集群节点间转移共享IP地址的所有者等,Heartbeat功能强大,但是部署和使用相对比较麻烦;与Heartbeat相比,Keepalived主要是通过虚拟路由冗余来实现高可用功能,虽然它没有Heartbeat功能强大,但Keepalived部署和使用非常简单,所有配置只需一个配置文件即可完成。
二、Keepalived是什么
Keepalived起初是为LVS设计的,专门用来监控集群中各个服务节点的状态。它根据TCP/IP参考模型的第三、第四和第五层交换机制检测每个服务节点的状态,如果某个服务节点出现异常,或工作出现故障,Keepalived将检测到,并将出现故障的服务节点从集群系统中剔除,而在故障节点恢复正常后,Keepalived又可以自动将此服务节点重新加入服务器集群中,这些工作全部自动完成,不需要人工干涉,需要人工完成的只是修复出现故障的服务节点。
Keepalived后来又加入了VRRP的功能,VRRP(VirtualRouterRedundancyProtocol,虚拟路由冗余协议)出现的目的是解决静态路由出现的单点故障问题,通过VRRP可以实现网络不间断稳定运行。因此Keepalived一方面具有服务器状态检测和故障隔离功能,另一方面也具有HA cluster功能。
三、VRRP协议与工作原理
1、协议
VRRP协议是为消除在静态缺省路由环境下的缺省路由器单点故障引起的网络失效而设计的主备模式的协议,使得在发生故障而进行设备功能切换时可以不影响内外数据通信,不需要再修改内部网络的网络参数。VRRP协议需要具有IP地址备份,优先路由选择,减少不必要的路由器间通信等功能。
VRRP协议将两台或多台路由器设备虚拟成一个设备,对外提供虚拟路由器IP(一个或多个),而在路由器组内部,如果实际拥有这个对外IP的路由器如果工作正常的话就是MASTER,或者是通过算法选举产生,MASTER实现针对虚拟路由器IP的各种网络功能,如ARP请求,ICMP,以及数据的转发等;其他设备不拥有该IP,状态是BACKUP,除了接收MASTER的VRRP状态通告信息外,不执行对外的网络功能。当主机失效时,BACKUP将接管原先MASTER的网络功能。
配置VRRP协议时需要配置每个路由器的虚拟路由器ID(VRID)和优先权值,使用VRID将路由器进行分组,具有相同VRID值的路由器为同一个组,VRID是一个0~255的正整数;同一组中的路由器通过使用优先权值来选举MASTER,优先权大者为MASTER,优先权也是一个0~255的正整数。
VRRP协议使用多播数据来传输VRRP数据,VRRP数据使用特殊的虚拟源MAC地址发送数据而不是自身网卡的MAC地址,VRRP运行时只有MASTER路由器定时发送VRRP通告信息,表示MASTER工作正常以及虚拟路由器IP(组),BACKUP只接收VRRP数据,不发送数据,如果一定时间内没有接收到MASTER的通告信息,各BACKUP将宣告自己成为MASTER,发送通告信息,重新进行MASTER选举状态。
2、MASTER选举
如果对外的虚拟路由器IP就是路由器本身配置的IP地址的话,该路由器始终都是MASTER;否则如果不具备虚拟IP的话,将进行MASTER选举,各路由器都宣告自己是MASTER,发送VRRP通告信息;如果收到其他机器的发来的通告信息的优先级比自己高,将转回BACKUP状态;如果优先级相等的话,将比较路由器的实际IP,IP值较大的优先权高;不过如果对外的虚拟路由器IP就是路由器本身的IP的话,该路由器始终将是MASTER,这时的优先级值为255。
四、Keepalived体系结构
keepalived也是模块化设计,不同模块复杂不同的功能,下面是keepalived的组件
core:是keepalived的核心,复杂主进程的启动和维护,全局配置文件的加载解析等
check:负责healthchecker(健康检查),包括了各种健康检查方式,以及对应的配置的解析包括LVS的配置解析
vrrp:VRRPD子进程,VRRPD子进程就是来实现VRRP协议的
libipfwc:iptables(ipchains)库,配置LVS会用到
libipvs*:配置LVS会用到
注意,keepalived和LVS完全是两码事,只不过他们各负其责相互配合而已。
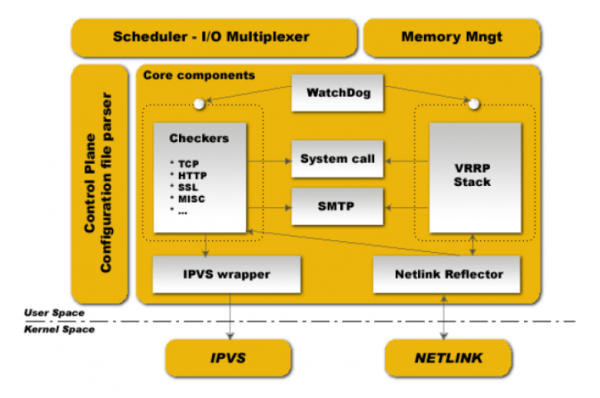
Keepalived的体系结构从整体上分为两层,分别是用户空间层(User Space)和内核空间层(Kernel Space)。
内核空间层处于最底层,它包括IPVS和NETLINK两个模块。IPVS模块是Keepalived引入的一个第三方模块,通过IPVS可以实现基于IP的负载均衡集群,IPVS默认包含在LVS集群软件中。在LVS集群中,IPVS可以安装在一台叫做Director Server的服务器上,同时Director Server上虚拟出一个IP地址对外提供服务,而用户必须通过这个虚拟IP地址才能访问服务。这个虚拟IP一般称为LVS的VIP,访问的请求首先经过VIP到达Director Server,然后由Director Server从服务器集群节点中选取一个服务节点响应用户的请求。
NETLINK模块主要用于实现一些高级路由框架和一些相关的网络功能,完成用户空间层Netlink Reflector模块发来的各种网络请求。
在用户空间层,Keepalived又分为4个部分,分别是Scheduler I/O Multiplexer、Memory Management、Control Plane和Core components。
Scheduler I/O Multiplexer:是一个I/O复用分发调度器,它负责安排Keepalived所以内部的任务请求。
Memory Management:是一个内存管理机制,这个框架提供了访问内存的一些通用方法。
Control Plane:是Keepalived的控制面板,可以实现对配置文件进行编译和解析,Keepalived的配置文件解析比较特殊,它并不是一次解析所以模块的配置,而是只有用到某模块时才解析相应的配置。
Core components:这部分是Keepalived的核心组件,包含了一系列功能模块,主要有WatchDog、Checkers、VRRP Stack、IPVS wrapper和Netlink Reflector。
WatchDog
WatchDog是计算机可靠领域中一个极为简单又非常有效的检测工具,它的工作原理是针对被监视的目标设置一个计数器和一个阀值,WatchDog会自己增加次计数值,然后等待被监视的目标周期性的重置该计数值。一旦被监控目标发生错误,就无法重置此计数值,WatchDog就会检测到,于是采取对应的恢复措施,例如重启或关闭。
在Linux中很早就引入了WatchDog功能,而Keepalived正是通过WatchDog的运行机制来监控Checkers和VRRP进程的。
Checkers
这是Keepalived最基础的功能,也是最主要的功能,可实现对服务器运行状态检测和故障隔离。
VRRP Stack
这是Keepalived后来引入的VRRP功能,可以实现HA集群失败切换(Failover)功能。Keepalived通过VRRP功能再结合LVS负载均衡软件即可部署一个高性能的负载均衡集群系统。
IPVS wrapper
这是IPVS功能的一个实现。IPVS wrapper模块可以将设置好的IPVS规则发送到内核空间并提交给IPVS模块,最终实现IPVS模块的负载均衡功能。
Netlink Reflector
用来实现高可用集群中Failover时虚拟IP(VIP)的设置和切换。Netlink Reflector的所有请求最后都发送到内核空间层的NETLINK模块来完成。
keepalived启动后会有三个进程
父进程:内存管理,子进程管理等等
子进程:VRRP子进程
子进程:healthchecker子进程
有图可知,两个子进程都被系统WatchDog看管,两个子进程各自复杂自己的事,healthchecker子进程复杂检查各自服务器的健康程度,例如HTTP,LVS等等,如果healthchecker子进程检查到MASTER上服务不可用了,就会通知本机上的兄弟VRRP子进程,让他删除通告,并且去掉虚拟IP,转换为BACKUP状态。
Keepalived是Linux下一个轻量级的高可用解决方案,它与Heartbeat、RoseHA实现的功能类似,都可以实现服务或者网络的高可用,单是又有差别,Heartbeat是一个专业的、功能完善的高可用软件,它提供了HA软件所需的基本功能,比如心跳检测和资源接管,监测集群中的系统服务,在集群节点间转移共享IP地址的所有者等,Heartbeat功能强大,但是部署和使用相对比较麻烦;与Heartbeat相比,Keepalived主要是通过虚拟路由冗余来实现高可用功能,虽然它没有Heartbeat功能强大,但Keepalived部署和使用非常简单,所有配置只需一个配置文件即可完成。
二、Keepalived是什么
Keepalived起初是为LVS设计的,专门用来监控集群中各个服务节点的状态。它根据TCP/IP参考模型的第三、第四和第五层交换机制检测每个服务节点的状态,如果某个服务节点出现异常,或工作出现故障,Keepalived将检测到,并将出现故障的服务节点从集群系统中剔除,而在故障节点恢复正常后,Keepalived又可以自动将此服务节点重新加入服务器集群中,这些工作全部自动完成,不需要人工干涉,需要人工完成的只是修复出现故障的服务节点。
Keepalived后来又加入了VRRP的功能,VRRP(VirtualRouterRedundancyProtocol,虚拟路由冗余协议)出现的目的是解决静态路由出现的单点故障问题,通过VRRP可以实现网络不间断稳定运行。因此Keepalived一方面具有服务器状态检测和故障隔离功能,另一方面也具有HA cluster功能。
三、VRRP协议与工作原理
1、协议
VRRP协议是为消除在静态缺省路由环境下的缺省路由器单点故障引起的网络失效而设计的主备模式的协议,使得在发生故障而进行设备功能切换时可以不影响内外数据通信,不需要再修改内部网络的网络参数。VRRP协议需要具有IP地址备份,优先路由选择,减少不必要的路由器间通信等功能。
VRRP协议将两台或多台路由器设备虚拟成一个设备,对外提供虚拟路由器IP(一个或多个),而在路由器组内部,如果实际拥有这个对外IP的路由器如果工作正常的话就是MASTER,或者是通过算法选举产生,MASTER实现针对虚拟路由器IP的各种网络功能,如ARP请求,ICMP,以及数据的转发等;其他设备不拥有该IP,状态是BACKUP,除了接收MASTER的VRRP状态通告信息外,不执行对外的网络功能。当主机失效时,BACKUP将接管原先MASTER的网络功能。
配置VRRP协议时需要配置每个路由器的虚拟路由器ID(VRID)和优先权值,使用VRID将路由器进行分组,具有相同VRID值的路由器为同一个组,VRID是一个0~255的正整数;同一组中的路由器通过使用优先权值来选举MASTER,优先权大者为MASTER,优先权也是一个0~255的正整数。
VRRP协议使用多播数据来传输VRRP数据,VRRP数据使用特殊的虚拟源MAC地址发送数据而不是自身网卡的MAC地址,VRRP运行时只有MASTER路由器定时发送VRRP通告信息,表示MASTER工作正常以及虚拟路由器IP(组),BACKUP只接收VRRP数据,不发送数据,如果一定时间内没有接收到MASTER的通告信息,各BACKUP将宣告自己成为MASTER,发送通告信息,重新进行MASTER选举状态。
2、MASTER选举
如果对外的虚拟路由器IP就是路由器本身配置的IP地址的话,该路由器始终都是MASTER;否则如果不具备虚拟IP的话,将进行MASTER选举,各路由器都宣告自己是MASTER,发送VRRP通告信息;如果收到其他机器的发来的通告信息的优先级比自己高,将转回BACKUP状态;如果优先级相等的话,将比较路由器的实际IP,IP值较大的优先权高;不过如果对外的虚拟路由器IP就是路由器本身的IP的话,该路由器始终将是MASTER,这时的优先级值为255。
四、Keepalived体系结构
keepalived也是模块化设计,不同模块复杂不同的功能,下面是keepalived的组件
core:是keepalived的核心,复杂主进程的启动和维护,全局配置文件的加载解析等
check:负责healthchecker(健康检查),包括了各种健康检查方式,以及对应的配置的解析包括LVS的配置解析
vrrp:VRRPD子进程,VRRPD子进程就是来实现VRRP协议的
libipfwc:iptables(ipchains)库,配置LVS会用到
libipvs*:配置LVS会用到
注意,keepalived和LVS完全是两码事,只不过他们各负其责相互配合而已。
Keepalived的体系结构从整体上分为两层,分别是用户空间层(User Space)和内核空间层(Kernel Space)。
内核空间层处于最底层,它包括IPVS和NETLINK两个模块。IPVS模块是Keepalived引入的一个第三方模块,通过IPVS可以实现基于IP的负载均衡集群,IPVS默认包含在LVS集群软件中。在LVS集群中,IPVS可以安装在一台叫做Director Server的服务器上,同时Director Server上虚拟出一个IP地址对外提供服务,而用户必须通过这个虚拟IP地址才能访问服务。这个虚拟IP一般称为LVS的VIP,访问的请求首先经过VIP到达Director Server,然后由Director Server从服务器集群节点中选取一个服务节点响应用户的请求。
NETLINK模块主要用于实现一些高级路由框架和一些相关的网络功能,完成用户空间层Netlink Reflector模块发来的各种网络请求。
在用户空间层,Keepalived又分为4个部分,分别是Scheduler I/O Multiplexer、Memory Management、Control Plane和Core components。
Scheduler I/O Multiplexer:是一个I/O复用分发调度器,它负责安排Keepalived所以内部的任务请求。
Memory Management:是一个内存管理机制,这个框架提供了访问内存的一些通用方法。
Control Plane:是Keepalived的控制面板,可以实现对配置文件进行编译和解析,Keepalived的配置文件解析比较特殊,它并不是一次解析所以模块的配置,而是只有用到某模块时才解析相应的配置。
Core components:这部分是Keepalived的核心组件,包含了一系列功能模块,主要有WatchDog、Checkers、VRRP Stack、IPVS wrapper和Netlink Reflector。
WatchDog
WatchDog是计算机可靠领域中一个极为简单又非常有效的检测工具,它的工作原理是针对被监视的目标设置一个计数器和一个阀值,WatchDog会自己增加次计数值,然后等待被监视的目标周期性的重置该计数值。一旦被监控目标发生错误,就无法重置此计数值,WatchDog就会检测到,于是采取对应的恢复措施,例如重启或关闭。
在Linux中很早就引入了WatchDog功能,而Keepalived正是通过WatchDog的运行机制来监控Checkers和VRRP进程的。
Checkers
这是Keepalived最基础的功能,也是最主要的功能,可实现对服务器运行状态检测和故障隔离。
VRRP Stack
这是Keepalived后来引入的VRRP功能,可以实现HA集群失败切换(Failover)功能。Keepalived通过VRRP功能再结合LVS负载均衡软件即可部署一个高性能的负载均衡集群系统。
IPVS wrapper
这是IPVS功能的一个实现。IPVS wrapper模块可以将设置好的IPVS规则发送到内核空间并提交给IPVS模块,最终实现IPVS模块的负载均衡功能。
Netlink Reflector
用来实现高可用集群中Failover时虚拟IP(VIP)的设置和切换。Netlink Reflector的所有请求最后都发送到内核空间层的NETLINK模块来完成。
keepalived启动后会有三个进程
父进程:内存管理,子进程管理等等
子进程:VRRP子进程
子进程:healthchecker子进程
有图可知,两个子进程都被系统WatchDog看管,两个子进程各自复杂自己的事,healthchecker子进程复杂检查各自服务器的健康程度,例如HTTP,LVS等等,如果healthchecker子进程检查到MASTER上服务不可用了,就会通知本机上的兄弟VRRP子进程,让他删除通告,并且去掉虚拟IP,转换为BACKUP状态。

相关文章推荐
- mysql集群之keepalived简单搭建
- LVS+Keepalived构建高可用负载均衡(测试篇)
- haproxy+keepalived实现高可用负载均衡(理论篇)
- haproxy+keepalived实现高可用负载均衡(实例配置)
- LVS+Keepalived构建高可用负载均衡配置方法(配置篇)
- keepalived之VRRP
- keepalived-2-配置文件详解
- mysql使用keepalived搭建双master
- 搭建mysql负载均衡及高可用环境
- Keepalived安装错误一例(make错误) 1.2.2
- keepalived+lvs_dr
- 中型网站架构部署笔记----HAproxy+keepalived
- 搭建高可用及负载均衡的REDIS
- Keepalived+LVS+Mysql-Cluster(7.1.10)架构方案
- nginx+keepalived 双机互备
- keepalived 安装配置
- RHEL6平台Keepalived+LVS+iSCSI+GFS搭建高可用负载均衡Web集群
- keepalived实现LVS的高可用以及实现web服务的高可用(主从模型、双主模型)
- Keepalived原理与实战精讲
- keepalived之vrrp_script篇