linux下驱动模块化编译,动态加载以及卸载
2012-05-10 10:04
399 查看
Linux驱动模块化编译、加载、卸载
2010-8-27
硬件平台:OMAPL-138
软件平台:linux2.6.32 + Ubuntu
步骤::
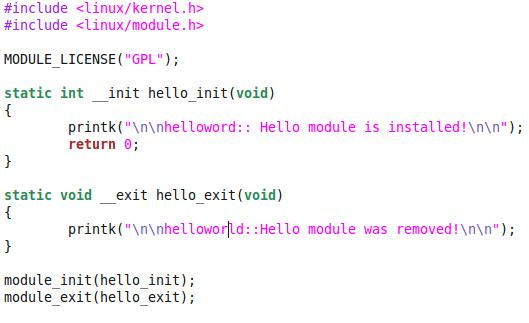
1、编写first_driver_hello.c文件,将其放在/linux2.6.32/drivers/char路径下:
2、在/linux2.6.32/drivers/cha/Kconfig文件中添加如下语句:

3、在/linux2.6.32/drivers/cha/Makefile文件中添加如下语句:

4、编译模块:
在控制台中进入到/linux2.6.32目录
Make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi- xconfig
Make ARCH=arn CROSS_COMPILE=arm-none-linux-gnueabi- modules
在/linux2.6.32/drivers/char下就可以看到first_driver_hello.ko文件
5、将first_driver_hello.ko拷贝到/opt/workspace/SEED-DEC138/nfs/opt(我的NFS挂载处)
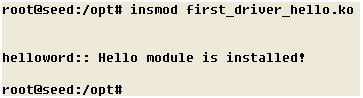
6、上电在进入linux后,执行
Insmod first_driver_hello.ko
Rmmod first_driver_hello.ko

2010-8-27
硬件平台:OMAPL-138
软件平台:linux2.6.32 + Ubuntu
步骤::
1、编写first_driver_hello.c文件,将其放在/linux2.6.32/drivers/char路径下:
2、在/linux2.6.32/drivers/cha/Kconfig文件中添加如下语句:
3、在/linux2.6.32/drivers/cha/Makefile文件中添加如下语句:
4、编译模块:
在控制台中进入到/linux2.6.32目录
Make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi- xconfig
Make ARCH=arn CROSS_COMPILE=arm-none-linux-gnueabi- modules
在/linux2.6.32/drivers/char下就可以看到first_driver_hello.ko文件
5、将first_driver_hello.ko拷贝到/opt/workspace/SEED-DEC138/nfs/opt(我的NFS挂载处)
6、上电在进入linux后,执行
Insmod first_driver_hello.ko
Rmmod first_driver_hello.ko

相关文章推荐
- linux下驱动模块化编译,动态加载以及卸载 分类: arm-linux-Ubuntu 2015-05-30 16:24 172人阅读 评论(0) 收藏
- linux下驱动模块化编译,动态加载以及卸载
- linux下驱动模块化编译,动态加载以及卸载
- linux下驱动模块化编译,动态加载以及卸载
- linux下驱动模块化编译,动态加载以及卸载
- Linux驱动编程day5-驱动自动加载,编译进内核以及自动执行
- linux驱动的动态加载和编译内核的方式加载
- linux驱动入门,编译,动态加载
- Linux下快速静态编译Qt以及Qt动态/静态版本共存
- Linux 2.6 内核驱动模块的编译和加载
- Linux 2.6内核的编译步骤及模块动态加载
- Linux 2.6内核的编译步骤及模块的动态加载
- Linux apache 单独编译 动态加载模块
- gendisk,request与bio结构体,以及块设备驱动注册与注销,以及加载与卸载
- linux中ELF文件动态链接的加载、解析及实例分析(二): 函数解析与卸载
- linux 驱动 编译加载 , 程序搬移到目标板,驱动源码和头文件位置
- Linux下快速静态编译Qt以及Qt动态/静态版本共存
- CentOS 5.6下将linux内核2.6.18升级到2.6.30,并编译动态加载linux下第一个模块
- 编译驱动的问题--linux版本不同不能加载驱动
- wince驱动学习笔记(vs2005实现流驱动动态加载与卸载 2)