用MEMS传感器感知工业自动化的世界
2018-03-14 10:42
344 查看
同时,工业4.0和物联网(IIoT)等倡议正在帮助制造业组织提高生产过程的效率。基于云的分析应用程序负责整理和提供关于运行生产或生产操作的许多不同方面的上下文。这些应用程序收集了传感器的基本数据,这些传感器部署在工厂的地面和每一个生产设备上。传感器被用来测量实时世界,在大多数情况下,将模拟测量转换成数字信号。环境参数包括温度、湿度和气压,但还有许多其他特性,如气体流量、液压流体压力和邻近性。其他类型的传感器需要精确测量运动和相对位置。这些可以包括用于机器人和自动化的惯性导航,工业设备的状态监测,以及冲击探测和记录。微机电系统(MEMS)由于其紧凑的尺寸、低功耗特性和极其精确的测量能力,越来越多地用于这些任务。本文将解释基于mems的加速度计和陀螺仪设备如何工作,并展示一些设计用于工业自动化应用程序的示例。
MEMS器件是在硅结构中以一种非常小的移动结构的方式构造的。通常情况下,这可能是一个结构,或者质量(证明质量),横向或垂直移动取决于测量的是什么。这种运动,或位移,可能是加速力的结果,例如相对位置的变化。这些微观运动的测量通常是通过微加工元件之间电容的变化来检测的。重力本身产生一个恒定的加速度1 g,一个加速度计可以测量的东西,倾斜正比于加速度计相对于引力场的角度的正弦值。一个高度精确的模拟前端测量了证明质量和固定结构之间的电容,然后用模数转换器(ADC)将信号带进数字域。然后,使用一个微控制器处理接收到的数据和一些基于软件的过滤器,这些过滤器可以拒绝与有效动作无关的信号。一个单一的基于质量的MEMS传感器可以在一个方向上检测到加速度,因此对于实际的三维目标,需要三个单独的MEMS结构(图1)。
检测三维加速度图。
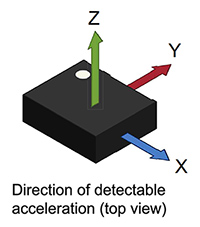
图1:检测3D加速度。
当检测到角速度的变化时,陀螺仪MEMS传感器使用的是微机械振动元件,而不是旋转机构。该振动元件保持在一个固定平面内,并通过电容(图2)的变化检测到横摇、俯仰和偏航角速率的变化(图2)。作为测量过程的一部分,角速度可以得到任何加速度或振动的补偿。
yaw、俯仰和横摇角速率的检测图。
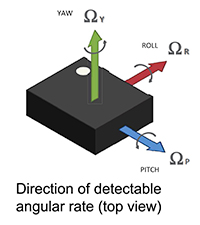
图2:使用MEMS陀螺仪检测偏航、俯仰和横摇角速率。
能够准确、连续地测量方向和角速度的变化是任何工业自动化机械的重要组成部分,最值得注意的是工业机器人。在过去,一个复杂的机械安排的旋转传感器和编码器需要定期校准和校准可能已经被使用。随着MEMS加速计和陀螺仪技术的普及,大量的研究被应用于它们的潜在用途。这项研究确定了需要在工业机器人的6轴自由度(图3a)上放置多个加速度计。图3b显示了描述运动的复杂性质和角率检测的图表。
简单工业机器人显示加速度计放置图。

图3:一个简单的工业机器人,它显示了加速度计的位置——图3a和图3b,图中显示了需要测量的不同参数的数量,以便在机器人的允许范围内完全控制它。
满足当今工业自动化设备的需求,是多种基于mems的结合三维加速度计和三维陀螺仪模块,如来自STMicroelectronics的ISM330DLC。最近,STMicroelectronics的MEMS产品的全面系列产品,ISM330DLC闭环系统封装(SIP)被专门设计用于工业4.0应用。该装置的三维加速度计和三维陀螺仪都在相同的硅模内加工,从而保证了最佳的稳定性和可靠的操作。在加速度计和陀螺仪上都有几种高度精确可靠的可配置检测范围。全尺寸加速度范围选项是+/- 2 g, +/- 4 g, +/- 8 g或+/- 16 g。陀螺仪的全角速率检测选项是+/- 125度/秒(dps), +/- 245 dps, +/- 500 dps, +/- 1000dps或+/- 2000 dps。
由1.71至3.6 VDC电源供电,土地网格阵列LGA-14L封装模块仅限2.5毫米x3毫米x0.83 mm,在其高性能的组合模式下,最高可达0.7 mA。有许多不同的节电模式供开发人员使用,允许独立自主的加速度计和陀螺仪,关闭期间,功耗可以降至最低的10µA。两个传感器的中间低功率模式不超过0.35 mA。在正常情况下,功率增加到0.5 mA。通过模块的SPI或I2C串行接口,可以实现与主机处理器的通信。如果需要额外的应用程序需求,还可以配置一个辅助SPI输出,以提供一个辅助和独立的传感器数据通道。分离的低通滤波器为光学图像稳定(OIS)应用提供传感器数据。陀螺仪还配备了温度传感器。
ISM330DLC配备了许多智能功能,进一步扩展了该设备在广泛应用程序中使用的功能。首先,传感器hub功能的提供允许捕获、存储和处理来自多达4个额外外部传感器的数据。提供这样一个集线器功能对于开发人员来说特别有用,他们不仅希望增加加速度计和陀螺仪感应到他们的设计,而且希望添加一些额外的传感器来适应应用程序。这样,传感器就可以直接连接到ISM3300DLC的I2C主机上,而无需来自应用程序处理器的任何资源。一个4kbyte FIFO缓冲区提供了一种方便的方法来存储这些数据,而不需要从主机应用程序处理器中进行任何中断或资源分配。如果需要,可以对FIFO缓冲区进行分区,不仅可以存储额外的外部传感器数据,还可以存储每个条目的时间戳,并记录陀螺仪传感器的温度。
ISM330DLC连接模式图像。

图4:ISM330DLC连接模式。
上面的图4说明了可能的四种不同的连接方式。在模式1中,只有陀螺仪和加速计是主动的,并连接到主机应用程序处理器。模式2增加了通过I2C接口从多达四个外部传感器捕获和存储数据的能力。模式3和4允许陀螺仪数据(模式3)和陀螺仪和加速度计数据(模式4)呈现给辅助SPI 3或4线接口。模块的时钟可以与外部源同步。
该模块的智能功能还包括几个闭环功能,如提供6D方向信息的能力、一个自由落体事件、设备唤醒模式,以及活动/不活动识别。另一种更适合与手持工业控制设备的用户界面交互的智能功能是检测单个和双击或点击的能力。
也许信号处理电路最重要的功能之一就是滤波。低通(LP)和高通(HP)滤波器的组合,用于拒绝对传感器读数产生任何影响的多余的外部信号。通过辅助SPI接口,为稳定控制回路——典型的光学图像稳定(OIS)——提供了独立的专用低通滤波器。
三维加速度计和三维陀螺仪滤波器框图。

图5:三维加速度计和三维陀螺仪滤波器框图。
图5演示了MEMS传感器通过模拟-数字转换器、过滤器块,以及到主要SPI/I2C接口的信号流。过滤器块的精确配置取决于许多因素,如选择的输出数据率(ODR)和传感器的全面检测范围。ODR可配置从12.5 Hz到6.66 kHz。当在模式1操作中使用时,例如,数字信号处理直接指向主IO。在模式3和4中,额外的过滤器被插入到信号处理链中,直接输出到辅助SPI接口(图6)。
在模式3中使用的陀螺仪数字信号处理链图。

图6:在模式3中使用的陀螺仪数字信号处理链。
与任何新设备或技术一样,大量硬件和软件工具的可用性极大地帮助原型设计了第一个设计。在这方面,ISM330DLC得到了很好的支持。STMicroelectronics已经为这个目的提供了一个全面的评估板,其中大部分基于STEVAL-MKI109V3 MEMS主板。这提供了一个完整的、现成的开发和原型平台,用于评估基于内存的设计(图7)。
STMicroelectronics MEMS主板平台的图像- STEVAL-MKI109V3。

图7:STMicroelectronics的MEMS主板平台- STEVAL-MKI109V3。
在主板上有一系列不同的适配器板可以插入到di24插座上。在ISM330DLC的情况下,适配器板是STEVAL-MKI182V1(图8),在PCB的中心可以看到ISM330DLC,被一些被动组件所环绕。
STMicroelectronics ISM330DLC适配器板- STEVAL-MKI182V1图像。

图8:ISM330DLC适配器板- STEVAL-MKI182V1。
主板主机STM32F401高性能105 DMIPS手臂®皮层®m4单片机(MCU)之间充当桥梁传感器适配器板和开发个人电脑。该MCU包括浮点单元(FPU),这是应用程序需要执行快速浮点计算的必要条件。它还配备了一个零等待状态自适应实时加速器,一个16位,32位和PWM定时器的集合,多达12个接口,包括3个x I2C, 3个USARTs, 4 x SPI和一个全速度USB 2.0兼容控制器。主板的框图如图9所示。USB接口连接到PC,并提供了一种为主板和适配器提供电源的方法,并提供了一个设备固件升级(DFU)过程,而不需要任何额外的开发工具。
MEMS评估主板框图的图像。

图9:MEMS评估主板框图。
对于PC来说,STMicroelectronics提供了免费的Unico Lite gui软件应用程序,它展示了如何配置所选的MEMS传感器并管理数据流。该软件提供了一个可靠的平台,可以尝试不同的输出数据率、检测灵敏度和集成额外的传感器。初始设置屏幕如图10所示,在Microsoft Visual Studio中可配置,以满足每个传感器模块的需求。
Unico Lite软件图形用户界面图像。

图10:Unico Lite软件的图形用户界面显示了在Microsoft Visual Studio中配置布局的能力。
一旦建立并运行,Unico Lite软件可以实时显示许多传感器参数,以说明它们是如何对变化的位置和角运动做出反应的。
通过这种方式,工业自动化机械的开发人员可以快速地对初始设计进行原型、测试和调试。由于所有的示意图、Gerber和布局文件都是在主板和适配器板的开源基础上提供的,这是一个非常简单的过程,可以将其用于更完整的设计。
任何工业自动化应用程序(如图3中所示的工业机器人)所需的传感器数量都是非常重要的。通过对每个肢体的空间位置提供可靠和实时的反馈,机器人的控制和执行器可以保持自信,它将执行器工具移动到空间中期望的位置。但是MEMS陀螺仪和加速计不仅仅是为了确保位置控制。它们还可以用来检测旋转或关节机械关节的振动,这些关节开始出现过度磨损或即将发生故障的迹象。实施适当的预防性维修制度是任何工业自动化安装的一个重要方面,而MEMS传感器的使用是传感和监测装置操作的关键组成部分。
结论
MEMS加速度计和陀螺仪是理想的用于广泛的工业自动化应用。MEMS传感器的微小尺寸、高可靠性和低功耗,在任何工业自动化机械中都能起到至关重要的作用。
MEMS器件是在硅结构中以一种非常小的移动结构的方式构造的。通常情况下,这可能是一个结构,或者质量(证明质量),横向或垂直移动取决于测量的是什么。这种运动,或位移,可能是加速力的结果,例如相对位置的变化。这些微观运动的测量通常是通过微加工元件之间电容的变化来检测的。重力本身产生一个恒定的加速度1 g,一个加速度计可以测量的东西,倾斜正比于加速度计相对于引力场的角度的正弦值。一个高度精确的模拟前端测量了证明质量和固定结构之间的电容,然后用模数转换器(ADC)将信号带进数字域。然后,使用一个微控制器处理接收到的数据和一些基于软件的过滤器,这些过滤器可以拒绝与有效动作无关的信号。一个单一的基于质量的MEMS传感器可以在一个方向上检测到加速度,因此对于实际的三维目标,需要三个单独的MEMS结构(图1)。
检测三维加速度图。
图1:检测3D加速度。
当检测到角速度的变化时,陀螺仪MEMS传感器使用的是微机械振动元件,而不是旋转机构。该振动元件保持在一个固定平面内,并通过电容(图2)的变化检测到横摇、俯仰和偏航角速率的变化(图2)。作为测量过程的一部分,角速度可以得到任何加速度或振动的补偿。
yaw、俯仰和横摇角速率的检测图。
图2:使用MEMS陀螺仪检测偏航、俯仰和横摇角速率。
能够准确、连续地测量方向和角速度的变化是任何工业自动化机械的重要组成部分,最值得注意的是工业机器人。在过去,一个复杂的机械安排的旋转传感器和编码器需要定期校准和校准可能已经被使用。随着MEMS加速计和陀螺仪技术的普及,大量的研究被应用于它们的潜在用途。这项研究确定了需要在工业机器人的6轴自由度(图3a)上放置多个加速度计。图3b显示了描述运动的复杂性质和角率检测的图表。
简单工业机器人显示加速度计放置图。
图3:一个简单的工业机器人,它显示了加速度计的位置——图3a和图3b,图中显示了需要测量的不同参数的数量,以便在机器人的允许范围内完全控制它。
满足当今工业自动化设备的需求,是多种基于mems的结合三维加速度计和三维陀螺仪模块,如来自STMicroelectronics的ISM330DLC。最近,STMicroelectronics的MEMS产品的全面系列产品,ISM330DLC闭环系统封装(SIP)被专门设计用于工业4.0应用。该装置的三维加速度计和三维陀螺仪都在相同的硅模内加工,从而保证了最佳的稳定性和可靠的操作。在加速度计和陀螺仪上都有几种高度精确可靠的可配置检测范围。全尺寸加速度范围选项是+/- 2 g, +/- 4 g, +/- 8 g或+/- 16 g。陀螺仪的全角速率检测选项是+/- 125度/秒(dps), +/- 245 dps, +/- 500 dps, +/- 1000dps或+/- 2000 dps。
由1.71至3.6 VDC电源供电,土地网格阵列LGA-14L封装模块仅限2.5毫米x3毫米x0.83 mm,在其高性能的组合模式下,最高可达0.7 mA。有许多不同的节电模式供开发人员使用,允许独立自主的加速度计和陀螺仪,关闭期间,功耗可以降至最低的10µA。两个传感器的中间低功率模式不超过0.35 mA。在正常情况下,功率增加到0.5 mA。通过模块的SPI或I2C串行接口,可以实现与主机处理器的通信。如果需要额外的应用程序需求,还可以配置一个辅助SPI输出,以提供一个辅助和独立的传感器数据通道。分离的低通滤波器为光学图像稳定(OIS)应用提供传感器数据。陀螺仪还配备了温度传感器。
ISM330DLC配备了许多智能功能,进一步扩展了该设备在广泛应用程序中使用的功能。首先,传感器hub功能的提供允许捕获、存储和处理来自多达4个额外外部传感器的数据。提供这样一个集线器功能对于开发人员来说特别有用,他们不仅希望增加加速度计和陀螺仪感应到他们的设计,而且希望添加一些额外的传感器来适应应用程序。这样,传感器就可以直接连接到ISM3300DLC的I2C主机上,而无需来自应用程序处理器的任何资源。一个4kbyte FIFO缓冲区提供了一种方便的方法来存储这些数据,而不需要从主机应用程序处理器中进行任何中断或资源分配。如果需要,可以对FIFO缓冲区进行分区,不仅可以存储额外的外部传感器数据,还可以存储每个条目的时间戳,并记录陀螺仪传感器的温度。
ISM330DLC连接模式图像。
图4:ISM330DLC连接模式。
上面的图4说明了可能的四种不同的连接方式。在模式1中,只有陀螺仪和加速计是主动的,并连接到主机应用程序处理器。模式2增加了通过I2C接口从多达四个外部传感器捕获和存储数据的能力。模式3和4允许陀螺仪数据(模式3)和陀螺仪和加速度计数据(模式4)呈现给辅助SPI 3或4线接口。模块的时钟可以与外部源同步。
该模块的智能功能还包括几个闭环功能,如提供6D方向信息的能力、一个自由落体事件、设备唤醒模式,以及活动/不活动识别。另一种更适合与手持工业控制设备的用户界面交互的智能功能是检测单个和双击或点击的能力。
也许信号处理电路最重要的功能之一就是滤波。低通(LP)和高通(HP)滤波器的组合,用于拒绝对传感器读数产生任何影响的多余的外部信号。通过辅助SPI接口,为稳定控制回路——典型的光学图像稳定(OIS)——提供了独立的专用低通滤波器。
三维加速度计和三维陀螺仪滤波器框图。
图5:三维加速度计和三维陀螺仪滤波器框图。
图5演示了MEMS传感器通过模拟-数字转换器、过滤器块,以及到主要SPI/I2C接口的信号流。过滤器块的精确配置取决于许多因素,如选择的输出数据率(ODR)和传感器的全面检测范围。ODR可配置从12.5 Hz到6.66 kHz。当在模式1操作中使用时,例如,数字信号处理直接指向主IO。在模式3和4中,额外的过滤器被插入到信号处理链中,直接输出到辅助SPI接口(图6)。
在模式3中使用的陀螺仪数字信号处理链图。
图6:在模式3中使用的陀螺仪数字信号处理链。
与任何新设备或技术一样,大量硬件和软件工具的可用性极大地帮助原型设计了第一个设计。在这方面,ISM330DLC得到了很好的支持。STMicroelectronics已经为这个目的提供了一个全面的评估板,其中大部分基于STEVAL-MKI109V3 MEMS主板。这提供了一个完整的、现成的开发和原型平台,用于评估基于内存的设计(图7)。
STMicroelectronics MEMS主板平台的图像- STEVAL-MKI109V3。
图7:STMicroelectronics的MEMS主板平台- STEVAL-MKI109V3。
在主板上有一系列不同的适配器板可以插入到di24插座上。在ISM330DLC的情况下,适配器板是STEVAL-MKI182V1(图8),在PCB的中心可以看到ISM330DLC,被一些被动组件所环绕。
STMicroelectronics ISM330DLC适配器板- STEVAL-MKI182V1图像。
图8:ISM330DLC适配器板- STEVAL-MKI182V1。
主板主机STM32F401高性能105 DMIPS手臂®皮层®m4单片机(MCU)之间充当桥梁传感器适配器板和开发个人电脑。该MCU包括浮点单元(FPU),这是应用程序需要执行快速浮点计算的必要条件。它还配备了一个零等待状态自适应实时加速器,一个16位,32位和PWM定时器的集合,多达12个接口,包括3个x I2C, 3个USARTs, 4 x SPI和一个全速度USB 2.0兼容控制器。主板的框图如图9所示。USB接口连接到PC,并提供了一种为主板和适配器提供电源的方法,并提供了一个设备固件升级(DFU)过程,而不需要任何额外的开发工具。
MEMS评估主板框图的图像。
图9:MEMS评估主板框图。
对于PC来说,STMicroelectronics提供了免费的Unico Lite gui软件应用程序,它展示了如何配置所选的MEMS传感器并管理数据流。该软件提供了一个可靠的平台,可以尝试不同的输出数据率、检测灵敏度和集成额外的传感器。初始设置屏幕如图10所示,在Microsoft Visual Studio中可配置,以满足每个传感器模块的需求。
Unico Lite软件图形用户界面图像。
图10:Unico Lite软件的图形用户界面显示了在Microsoft Visual Studio中配置布局的能力。
一旦建立并运行,Unico Lite软件可以实时显示许多传感器参数,以说明它们是如何对变化的位置和角运动做出反应的。
通过这种方式,工业自动化机械的开发人员可以快速地对初始设计进行原型、测试和调试。由于所有的示意图、Gerber和布局文件都是在主板和适配器板的开源基础上提供的,这是一个非常简单的过程,可以将其用于更完整的设计。
任何工业自动化应用程序(如图3中所示的工业机器人)所需的传感器数量都是非常重要的。通过对每个肢体的空间位置提供可靠和实时的反馈,机器人的控制和执行器可以保持自信,它将执行器工具移动到空间中期望的位置。但是MEMS陀螺仪和加速计不仅仅是为了确保位置控制。它们还可以用来检测旋转或关节机械关节的振动,这些关节开始出现过度磨损或即将发生故障的迹象。实施适当的预防性维修制度是任何工业自动化安装的一个重要方面,而MEMS传感器的使用是传感和监测装置操作的关键组成部分。
结论
MEMS加速度计和陀螺仪是理想的用于广泛的工业自动化应用。MEMS传感器的微小尺寸、高可靠性和低功耗,在任何工业自动化机械中都能起到至关重要的作用。

相关文章推荐
- 真实世界的 Windows Azure:在Windows Azure上 Xpertdoc部署它托管的文档输出自动化解决方案
- 用Delphi在工业控制和自动化实现多线程进行数据采集
- 工业控制自动化技术
- 真实世界的 Windows Azure:在Windows Azure上 Xpertdoc部署它托管的文档输出自动化解决方案
- 我国工业自动化市场现状分析报告
- 我国医药工业自动化的特点、需求和内容究竟是什么?(三)
- 近期活动盘点:工业大数据讲座、大数据自杀风险感知讲座、数据法学研讨会、海外学者短期讲学(12.3-12.13)
- 用Delphi在工业控制和自动化实现多线程进行数据采集
- 感知世界 体味教学——AYC教学培训紧锣密鼓地展开
- TWaver家族新成员 — Legolas工业自动化设计平台
- TWaver家族新成员 — Legolas工业自动化设计平台
- 真实世界的 Windows Azure:在Windows Azure上 Xpertdoc部署它托管的文档输出自动化解决方案
- 工业标准的品质也已成为开源世界中的范例之一
- 我国医药工业自动化的特点、需求和内容究竟是什么?(四)
- 楼宇及工业自动化总线协议介绍
- Legolas工业自动化平台案例 —— 水源地自动化监控系统
- .net 和工业自动化
- 工业标准的品质也已成为开源世界中的范例之一
- 4DIAC 1.3.3 发布,工业自动化控制框架
- 感知世界中的意识形成