步进电机的加减速控制
2015-07-19 14:49
288 查看
对于步进电机的点-位控制系统,从起点至终点的运行速度都有一定要求。
如果要求运行的速度小于系统的极限启动频率,则系统可以以要求的速度直接启动,运行至终点后可立即停发脉冲串而令其停止。
系统的系统频率是比较低的,而要求的运行速度往往较高。如果系统以要求的速度直接启动,可能发生丢步或根本不运行的情况。系统运行起来后,如果达到终点时立刻停发脉冲串,则会因为系统惯性冲过终点发生偏差。因此在点-位控制过程中,当要求运行的速度大于系统的极限启动频率时,运行速度都需要有一个加速-恒速-减速-低恒速-停止的过程。升速时的起始速度应等于或略小于系统的极限启动频率,而不是从零开始。减速过程结束时的速度一般应等于略低于启动速度,再经数步低速运行后停止。
常见的加减速曲线有梯形和S形两种,两者区别如下表:
如果要求运行的速度小于系统的极限启动频率,则系统可以以要求的速度直接启动,运行至终点后可立即停发脉冲串而令其停止。
系统的系统频率是比较低的,而要求的运行速度往往较高。如果系统以要求的速度直接启动,可能发生丢步或根本不运行的情况。系统运行起来后,如果达到终点时立刻停发脉冲串,则会因为系统惯性冲过终点发生偏差。因此在点-位控制过程中,当要求运行的速度大于系统的极限启动频率时,运行速度都需要有一个加速-恒速-减速-低恒速-停止的过程。升速时的起始速度应等于或略小于系统的极限启动频率,而不是从零开始。减速过程结束时的速度一般应等于略低于启动速度,再经数步低速运行后停止。
常见的加减速曲线有梯形和S形两种,两者区别如下表:
| 项目 | 直线(梯形)加减速 | “S”型加减速曲线 |
| 定义 | 指按直线方式(从启动速度到目标速度的加减速),以一定的比例进行加速/减速 | 加速/减速开始时速度比较缓慢,然后逐渐加快。在加速/减速接近结束时速度再次减慢下来,从而使移动较为稳定。S 字加减速的类型有Sin 曲线、2次曲线、循环曲线、3 次曲线 |
| 曲线 | 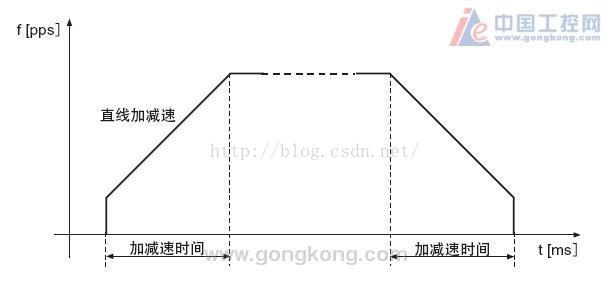 | 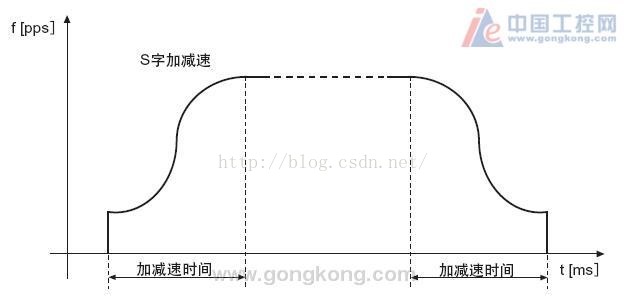 |
| 加减速段曲线 | 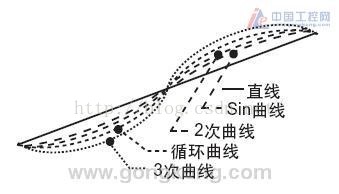 | |
| 曲线类型 | 一次曲线 | 复杂曲线 |
| 加速度 | 不变 | 不同的运动点加速度值不同 |
| 实现程度 | 容易 | 难 |
| 运动效果 | 启动、停止、高速运动段会产生很大的冲击和振动及噪音 | 启动、停止、高速运动段会产生很小的冲击和振动及噪音 |
| 应用场合 | 简单的定长送料 | 精密的工件搬运,精密的工件建工,例如LCD玻璃的搬运,半导体工件的加工 |

相关文章推荐
- 57步进电机了解与实践笔记
- 步进电机正反转
- 利用树莓派控制步进电机——Python语言
- 利用树莓派控制步进电机——C语言
- 51--步进电机驱动代码
- 步进电机细分驱动
- Verilog HDL语言的四相八拍步进电机驱动
- STM32+ULN2003驱动步进电机
- 【STM32 .Net MF开发板学习-11】步进电机控制(非PWM模式) 推荐
- 工业级开发中的一些常识
- 适用的28BYJ-48步进电机掌握程序
- 28BYJ-48步进电机掌握程序根底
- 28BYJ-48步进电机迁移转变精度与深化剖析
- 让28BYJ-48步进电机转起来
- 28BYJ-48步进电机道理
- 电机的分类
- 步进电机相关问题
- 步进电机驱动方式(细分)概述
- DDA输出脉冲序列控制步进电机正反转(加速、减速、匀速)
- 【龙印】步进电机使用七段式抛物线型S曲线加减速和路径规划的理论分析和实现