OpenCV2.4.4 图像旋转和缩放
2013-06-03 22:30
337 查看
旋转变换公式的推导:
如下图, 在2维坐标上,有一点p(x, y) , 直线op的长度为r, 直线op和x轴的正向的夹角为a。 直线op围绕原点做逆时针方向b度的旋转,到达p’ (s,t)
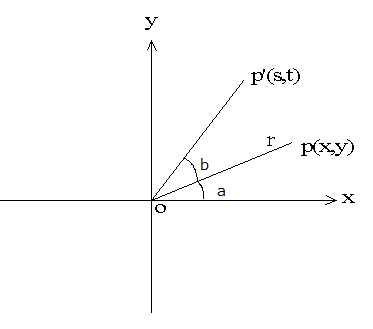
则有
s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b) (1.1)
t = r sin(a + b) = r sin(a)cos(b) + r cos(a) sin(b) (1.2)
其中 x = r cos(a) , y = r sin(a)
代入(1.1), (1.2) ,
s = x cos(b) – y sin(b) (1.3)
t = x sin(b) + y cos(b) (1.4)
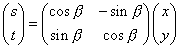
用行列式表示如下
用到的一些OpenCV中的函数:
(1) CvMat*cv2DRotationMatrix(CvPoint2D32f center, double angle, double scale, CvMat*map_matrix);
Mat getRotationMatrix2D(Point2f center, double angle, double scale );
说明:计算旋转加缩放的仿射矩阵
参数:center:旋转中心
angle:旋转度数,正值表示逆时针旋转。
scale:各方向同性的缩放尺度
map_matrix:输出参数,仿射变换矩阵,浮点型2*3矩阵
返回值:仿射变换矩阵
注意:默认的变换是以相反的顺序进行的,即从目标到源。对于目标图像中的任一点(x,y),先计算出它在
源图像中的坐标,再将此点的像素值拷贝到目标图像中,所以计算出的变换矩阵是从目标到源的变换矩阵。
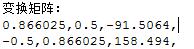
例如逆时针旋转30度,不做缩放,计算出的变换矩阵为:
(2) void cvWarpAffine(const CvArr* src,CvArr* dst, const CvMat* map_matrix,
intflags=CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS, CvScalar fillval=cvScalarAll(0) );
void warpAffine(InputArray src, OutputArray dst, InputArray M, Sizedsize, int flags=INTER_LINEAR,
int borderMode = BORDER_CONSTANT, constScalar& borderValue=Scalar() );
说明:对图像做仿射变换
参数:M:输入参数,2*3的仿射变换矩阵
dsize:输出图像的尺寸
flags:差值方法,若设置WARP_INVERSE_MAP标识,指明M是目的到源的变换。
borderMode:边界处理方法
注意:当设置标志位WARP_INVERSE_MAP时,目标图像的计算公式为:

否则,先调用invertAffineTransform()计算出M的逆仿射变换M’,然后将M’带入以上公式进行变换。
效果图:
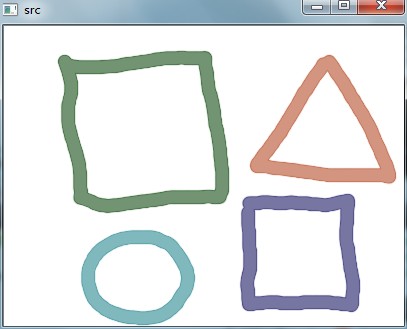
原图
临时图像1

结果1

临时图像2

结果2
参考
OpenCV2.4.4 图像旋转和缩放
如下图, 在2维坐标上,有一点p(x, y) , 直线op的长度为r, 直线op和x轴的正向的夹角为a。 直线op围绕原点做逆时针方向b度的旋转,到达p’ (s,t)
则有
s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b) (1.1)
t = r sin(a + b) = r sin(a)cos(b) + r cos(a) sin(b) (1.2)
其中 x = r cos(a) , y = r sin(a)
代入(1.1), (1.2) ,
s = x cos(b) – y sin(b) (1.3)
t = x sin(b) + y cos(b) (1.4)
用行列式表示如下
用到的一些OpenCV中的函数:
(1) CvMat*cv2DRotationMatrix(CvPoint2D32f center, double angle, double scale, CvMat*map_matrix);
Mat getRotationMatrix2D(Point2f center, double angle, double scale );
说明:计算旋转加缩放的仿射矩阵
参数:center:旋转中心
angle:旋转度数,正值表示逆时针旋转。
scale:各方向同性的缩放尺度
map_matrix:输出参数,仿射变换矩阵,浮点型2*3矩阵
返回值:仿射变换矩阵
注意:默认的变换是以相反的顺序进行的,即从目标到源。对于目标图像中的任一点(x,y),先计算出它在
源图像中的坐标,再将此点的像素值拷贝到目标图像中,所以计算出的变换矩阵是从目标到源的变换矩阵。
例如逆时针旋转30度,不做缩放,计算出的变换矩阵为:
(2) void cvWarpAffine(const CvArr* src,CvArr* dst, const CvMat* map_matrix,
intflags=CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS, CvScalar fillval=cvScalarAll(0) );
void warpAffine(InputArray src, OutputArray dst, InputArray M, Sizedsize, int flags=INTER_LINEAR,
int borderMode = BORDER_CONSTANT, constScalar& borderValue=Scalar() );
说明:对图像做仿射变换
参数:M:输入参数,2*3的仿射变换矩阵
dsize:输出图像的尺寸
flags:差值方法,若设置WARP_INVERSE_MAP标识,指明M是目的到源的变换。
borderMode:边界处理方法
注意:当设置标志位WARP_INVERSE_MAP时,目标图像的计算公式为:
否则,先调用invertAffineTransform()计算出M的逆仿射变换M’,然后将M’带入以上公式进行变换。
#include<iostream>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
#define SCALE 0.5 //缩放比例
int main()
{
Mat src = imread("pic3.png");
Mat dst;//输出图像
int angle = 30;//旋转角度(正值表示逆时针旋转)
int length;//输出图像的宽度或高度
//为了保证无论如何旋转都能放下,输出图像的长和宽都设为输入图像对角线长度乘以SCALE
//但如果是缩小(SCALE<=1),这样会导致临时图像中放不下原图,所以对于所有缩小的情况,输出图像和临时图像的长宽都设为原图的对角线长度
if(SCALE <= 1)
length = sqrt(src.cols*src.cols + src.rows*src.rows);
else
length = sqrt(src.cols*src.cols + src.rows*src.rows) * SCALE;
//建立临时图像,长宽都是源图像的对角线长度,将源图像复制到临时图像的中心后再变换
Mat tempImg(length,length,src.type());//临时图像,大小和输出图像一样大
int ROI_x = length/2 - src.cols/2;//ROI矩形左上角的x坐标
int ROI_y = length/2 - src.rows/2;//ROI矩形左上角的y坐标
Rect ROIRect(ROI_x,ROI_y,src.cols,src.rows);//ROI矩形
Mat tempImgROI2(tempImg,ROIRect);//tempImg的中间部分
src.copyTo(tempImgROI2);//将原图复制到tempImg的中心
Point2f center(length/2,length/2);//旋转中心
Mat M = getRotationMatrix2D(center,angle,SCALE);//计算旋转的仿射变换矩阵
//输出看看算出的矩阵是什么
cout<<"变换矩阵:"<<endl;
cout<<M.at<double>(0,0)<<","<<M.at<double>(0,1)<<","<<M.at<double>(0,2)<<","<<endl;
cout<<M.at<double>(1,0)<<","<<M.at<double>(1,1)<<","<<M.at<double>(1,2)<<","<<endl;
warpAffine(tempImg,dst,M,Size(length,length));//仿射变换
//显示
imshow("src",src);
imshow("tempImg",tempImg);
imshow("dst",dst);
waitKey(0);
return 0;
}效果图:
原图
临时图像1
结果1
临时图像2
结果2
参考
OpenCV2.4.4 图像旋转和缩放

相关文章推荐
- Opencv2.4.4作图像旋转和缩放
- OpenCV中文网站例程——图像旋转和缩放
- opencv 图像仿射变换 计算仿射变换后对应特征点的新坐标 图像旋转、缩放、平移
- [opencv] 图像几何变换:旋转,缩放,斜切
- 【OpenCV】图像几何变换:旋转,缩放,斜切
- 【OpenCV】图像几何变换:旋转,缩放,斜切
- 【OpenCV】图像几何变换:旋转,缩放,斜切
- 【OpenCV】图像几何变换:旋转,缩放,斜切
- OpenCV-图像几何变换:旋转,缩放,斜切
- OpenCV_图像旋转与缩放
- 【OpenCV】图像几何变换:旋转,缩放,斜切
- OpenCV学习之图像的旋转与缩放
- opencv 图像仿射变换 计算仿射变换后对应特征点的新坐标 图像旋转、缩放、平移
- OpenCV 图像旋转和缩放
- OpenCV2:图像的几何变换,平移、镜像、缩放、旋转(2)
- OpenCV 图像几何变换:旋转,缩放,斜切
- 【OpenCV】图像几何变换:旋转,缩放,斜切
- OpenCV2:图像的几何变换,平移、镜像、缩放、旋转(1)
- OpenCV-图像几何变换:旋转,缩放,斜切 .
- 【OpenCV】图像几何变换:旋转,缩放,斜切