AI Studio 飞桨 零基础入门深度学习笔记6.6-手写数字识别之优化算法
AI Studio 飞桨 零基础入门深度学习笔记6.6-手写数字识别之优化算法
概述
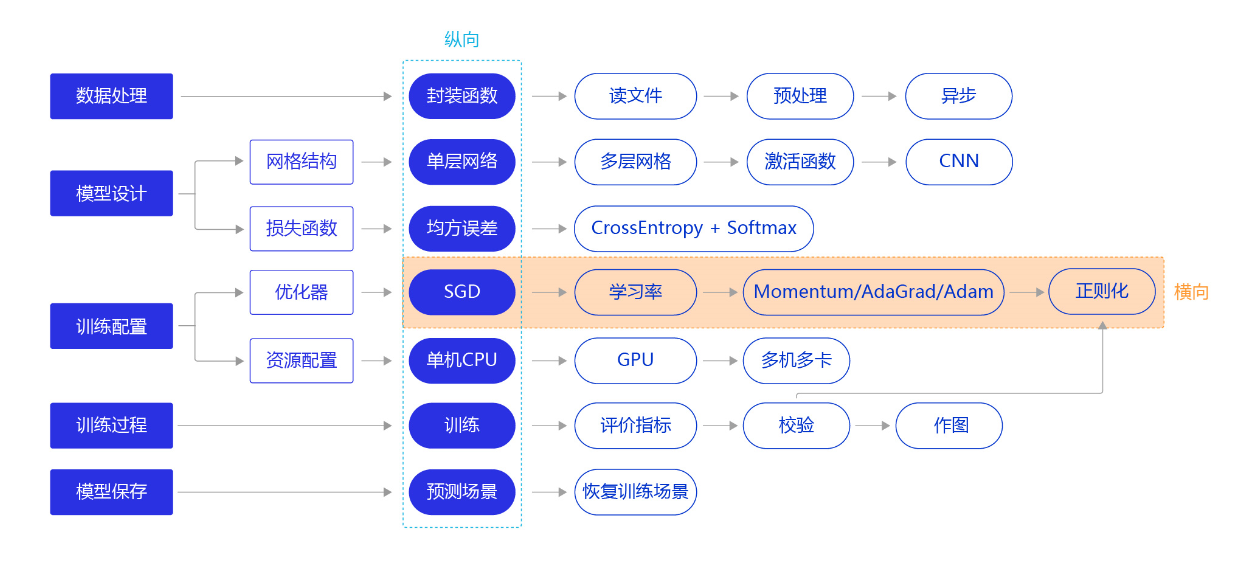
上一节我们明确了分类任务的损失函数(优化目标)的相关概念和实现方法,本节我们依旧横向展开"横纵式"教学法,如 图1 所示,本节主要探讨在手写数字识别任务中,使得损失达到最小的参数取值的实现方法。
前提条件
在优化算法之前,需要进行数据处理、设计神经网络结构,代码与上一节保持一致,如下所示。如果读者已经掌握了这部分内容,可以直接阅读正文部分。
# 加载相关库
import os
import random
import paddle
import paddle.fluid as fluid
from paddle.fluid.dygraph.nn import Conv2D, Pool2D, Linear
import numpy as np
from PIL import Image
import gzip
import json
# 定义数据集读取器
def load_data(mode='train'):
# 读取数据文件
datafile = './work/mnist.json.gz'
print('loading mnist dataset from {} ......'.format(datafile))
data = json.load(gzip.open(datafile))
# 读取数据集中的训练集,验证集和测试集
train_set, val_set, eval_set = data
# 数据集相关参数,图片高度IMG_ROWS, 图片宽度IMG_COLS
IMG_ROWS = 28
IMG_COLS = 28
# 根据输入mode参数决定使用训练集,验证集还是测试
if mode == 'train':
imgs = train_set[0]
labels = train_set[1]
elif mode == 'valid':
imgs = val_set[0]
labels = val_set[1]
elif mode == 'eval':
imgs = eval_set[0]
labels = eval_set[1]
# 获得所有图像的数量
imgs_length = len(imgs)
# 验证图像数量和标签数量是否一致
assert len(imgs) == len(labels), \
"length of train_imgs({}) should be the same as train_labels({})".format(
len(imgs), len(labels))
index_list = list(range(imgs_length))
# 读入数据时用到的batchsize
BATCHSIZE = 100
# 定义数据生成器
def data_generator():
# 训练模式下,打乱训练数据
if mode == 'train':
random.shuffle(index_list)
imgs_list = []
labels_list = []
# 按照索引读取数据
for i in index_list:
# 读取图像和标签,转换其尺寸和类型
img = np.reshape(imgs[i], [1, IMG_ROWS, IMG_COLS]).astype('float32')
label = np.reshape(labels[i], [1]).astype('int64')
imgs_list.append(img)
labels_list.append(label)
# 如果当前数据缓存达到了batch size,就返回一个批次数据
if len(imgs_list) == BATCHSIZE:
yield np.array(imgs_list), np.array(labels_list)
# 清空数据缓存列表
imgs_list = []
labels_list = []
# 如果剩余数据的数目小于BATCHSIZE,
# 则剩余数据一起构成一个大小为len(imgs_list)的mini-batch
if len(imgs_list) > 0:
yield np.array(imgs_list), np.array(labels_list)
return data_generator
# 定义模型结构
class MNIST(fluid.dygraph.Layer):
def __init__(self):
super(MNIST, self).__init__()
# 定义一个卷积层,输出通道20,卷积核大小为5,步长为1,padding为2,使用relu激活函数
self.conv1 = Conv2D(num_channels=1, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool1 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个卷积层,输出通道20,卷积核大小为5,步长为1,padding为2,使用relu激活函数
self.conv2 = Conv2D(num_channels=20, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool2 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个全连接层,输出节点数为10
self.fc = Linear(input_dim=980, output_dim=10, act='softmax')
# 定义网络的前向计算过程
def forward(self, inputs):
x = self.conv1(inputs)
x = self.pool1(x)
x = self.conv2(x)
x = self.pool2(x)
x = fluid.layers.reshape(x, [x.shape[0], -1])
x = self.fc(x)
return x
设置学习率
在深度学习神经网络模型中,通常使用标准的随机梯度下降算法更新参数,学习率代表参数更新幅度的大小,即步长。当学习率最优时,模型的有效容量最大,最终能达到的效果最好。学习率和深度学习任务类型有关,合适的学习率往往需要大量的实验和调参经验。探索学习率最优值时需要注意如下两点:
- 学习率不是越小越好。学习率越小,损失函数的变化速度越慢,意味着我们需要花费更长的时间进行收敛,如 图2 左图所示。
- 学习率不是越大越好。只根据总样本集中的一个批次计算梯度,抽样误差会导致计算出的梯度不是全局最优的方向,且存在波动。在接近最优解时,过大的学习率会导致参数在最优解附近震荡,损失难以收敛,如 图2 右图所示。
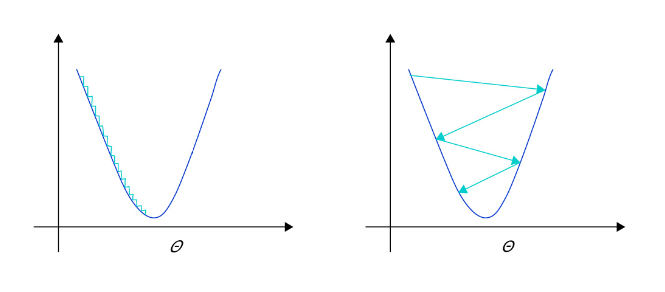
图2: 不同学习率(步长过小/过大)的示意图
在训练前,我们往往不清楚一个特定问题设置成怎样的学习率是合理的,因此在训练时可以尝试调小或调大,通过观察Loss下降的情况判断合理的学习率,设置学习率的代码如下所示。
#仅优化算法的设置有所差别
with fluid.dygraph.guard():
model = MNIST()
model.train()
#调用加载数据的函数
train_loader = load_data('train')
#设置不同初始学习率
optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01,parameter_list=model.parameters())
# optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.001, parameter_list=model.parameters())
# optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.1, parameter_list=model.parameters())
EPOCH_NUM = 5
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据,变得更加简洁
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程
predict = model(image)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了200批次的数据,打印下当前Loss的情况
if batch_id % 200 == 0:
print("epoch: {}, batch: {}, loss is: {}".format(epoch_id, batch_id, avg_loss.numpy()))
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
#保存模型参数
fluid.save_dygraph(model.state_dict(), 'mnist')
loading mnist dataset from ./work/mnist.json.gz ...... epoch: 0, batch: 0, loss is: [2.5479224] epoch: 0, batch: 200, loss is: [0.51583934] epoch: 0, batch: 400, loss is: [0.3206303] epoch: 1, batch: 0, loss is: [0.2574886] epoch: 1, batch: 200, loss is: [0.33207777] epoch: 1, batch: 400, loss is: [0.2047088] epoch: 2, batch: 0, loss is: [0.10459759] epoch: 2, batch: 200, loss is: [0.14488357] epoch: 2, batch: 400, loss is: [0.16438884] epoch: 3, batch: 0, loss is: [0.22483312] epoch: 3, batch: 200, loss is: [0.11302722] epoch: 3, batch: 400, loss is: [0.11553524] epoch: 4, batch: 0, loss is: [0.12319741] epoch: 4, batch: 200, loss is: [0.07355891] epoch: 4, batch: 400, loss is: [0.08584274]
学习率的主流优化算法
学习率是优化器的一个参数,调整学习率看似是一件非常麻烦的事情,需要不断的调整步长,观察训练时间和Loss的变化。经过研究员的不断的实验,当前已经形成了四种比较成熟的优化算法:SGD、Momentum、AdaGrad和Adam,效果如 图3 所示。
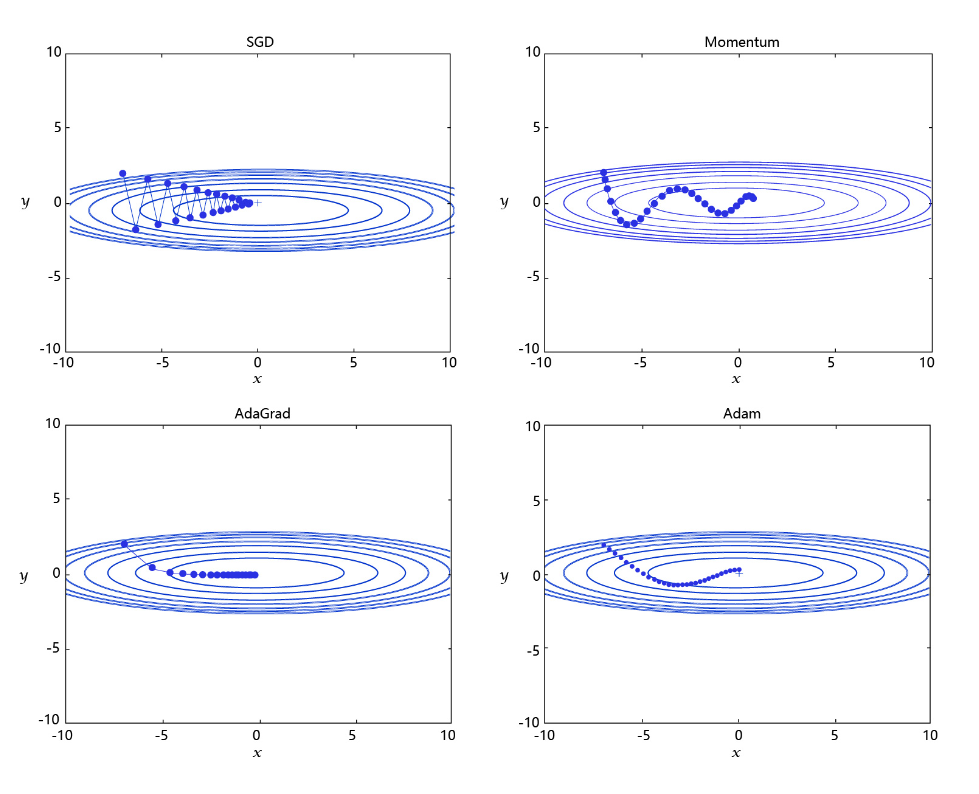
图3: 不同学习率算法效果示意图
每个批次的数据含有抽样误差,导致梯度更新的方向波动较大。如果我们引入物理动量的概念,给梯度下降的过程加入一定的“惯性”累积,就可以减少更新路径上的震荡,即每次更新的梯度由“历史多次梯度的累积方向”和“当次梯度”加权相加得到。历史多次梯度的累积方向往往是从全局视角更正确的方向,这与“惯性”的物理概念很像,也是为何其起名为“Momentum”的原因。类似不同品牌和材质的篮球有一定的重量差别,街头篮球队中的投手(擅长中远距离投篮)喜欢稍重篮球的比例较高。一个很重要的原因是,重的篮球惯性大,更不容易受到手势的小幅变形或风吹的影响。
- AdaGrad: 根据不同参数距离最优解的远近,动态调整学习率。学习率逐渐下降,依据各参数变化大小调整学习率。
通过调整学习率的实验可以发现:当某个参数的现值距离最优解较远时(表现为梯度的绝对值较大),我们期望参数更新的步长大一些,以便更快收敛到最优解。当某个参数的现值距离最优解较近时(表现为梯度的绝对值较小),我们期望参数的更新步长小一些,以便更精细的逼近最优解。类似于打高尔夫球,专业运动员第一杆开球时,通常会大力打一个远球,让球尽量落在洞口附近。当第二杆面对离洞口较近的球时,他会更轻柔而细致的推杆,避免将球打飞。与此类似,参数更新的步长应该随着优化过程逐渐减少,减少的程度与当前梯度的大小有关。根据这个思想编写的优化算法称为“AdaGrad”,Ada是Adaptive的缩写,表示“适应环境而变化”的意思。RMSProp是在AdaGrad基础上的改进,AdaGrad会累加之前所有的梯度平方,而RMSprop仅仅是计算对应的梯度平均值,因而可以解决AdaGrad学习率急剧下降的问题。
- Adam: 由于动量和自适应学习率两个优化思路是正交的,因此可以将两个思路结合起来,这就是当前广泛应用的算法。
说明:
每种优化算法均有更多的参数设置,详情可查阅飞桨的官方API文档。理论最合理的未必在具体案例中最有效,所以模型调参是很有必要的,最优的模型配置往往是在一定“理论”和“经验”的指导下实验出来的。
我们可以尝试选择不同的优化算法训练模型,观察训练时间和损失变化的情况,代码实现如下。
#仅优化算法的设置有所差别
with fluid.dygraph.guard():
model = MNIST()
model.train()
#调用加载数据的函数
train_loader = load_data('train')
#四种优化算法的设置方案,可以逐一尝试效果
optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01, parameter_list=model.parameters())
#optimizer = fluid.optimizer.MomentumOptimizer(learning_rate=0.01, momentum=0.9, parameter_list=model.parameters())
#optimizer = fluid.optimizer.AdagradOptimizer(learning_rate=0.01, parameter_list=model.parameters())
#optimizer = fluid.optimizer.AdamOptimizer(learning_rate=0.01, parameter_list=model.parameters())
EPOCH_NUM = 5
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据,变得更加简洁
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程
predict = model(image)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了200批次的数据,打印下当前Loss的情况
if batch_id % 200 == 0:
print("epoch: {}, batch: {}, loss is: {}".format(epoch_id, batch_id, avg_loss.numpy()))
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
#保存模型参数
fluid.save_dygraph(model.state_dict(), 'mnist')

- AI Studio 飞桨 零基础入门深度学习笔记6.7-手写数字识别之资源配置
- 飞桨百度架构师手把手带你零基础实践深度学习——手写数字识别网络结构的优化
- 飞桨百度架构师手把手带你零基础实践深度学习——手写数字识别损失函数的优化
- 机器学习深度学习基础笔记(2)——梯度下降之手写数字识别算法实现
- 飞桨百度架构师手把手带你零基础实践深度学习——手写数字识别训练调试与优化
- 飞桨百度架构师手把手带你零基础实践深度学习——手写数字识别 资源配置
- 用MXnet入门实战深度学习之一:安装GPU版mxnet并跑一个MNIST手写数字识别
- [TensorFlow深度学习入门]实战十一·用双向BiRNN(LSTM)做手写数字识别准确率99%+
- 用MXnet入门实战深度学习之一:安装GPU版mxnet并跑一个MNIST手写数字识别
- Coursera deeplearning.ai 深度学习笔记2-2-Optimization algorithms-优化算法与代码实现
- Python 学习笔记(Machine Learning In Action)K-近邻算法识别手写数字
- 飞桨 百度架构师手把手带你零基础实践深度学习21天 学习笔记——零基础入门
- 【深度学习-学习笔记1】MNIST手写数字识别之MLP实现
- 用MXnet入门实战深度学习之一:安装GPU版mxnet并跑一个MNIST手写数字识别
- 用MXnet入门实战深度学习之一:安装GPU版mxnet并跑一个MNIST手写数字识别
- 【深度学习】笔记2_caffe自带的第一个例子,Mnist手写数字识别代码,过程,网络详解
- 深度学习笔记5torch实现mnist手写数字识别
- [TensorFlow深度学习入门]实战五·用RNN(LSTM)做手写数字识别准确率98%+
- mnist手写数字识别——深度学习入门项目(tensorflow+keras+Sequential模型)
- 深度学习入门实践_十行搭建手写数字识别神经网络