视觉SLAM/opencv特征匹配相关函数
2019-02-16 15:13
597 查看
视觉SLAM/opencv特征匹配相关函数
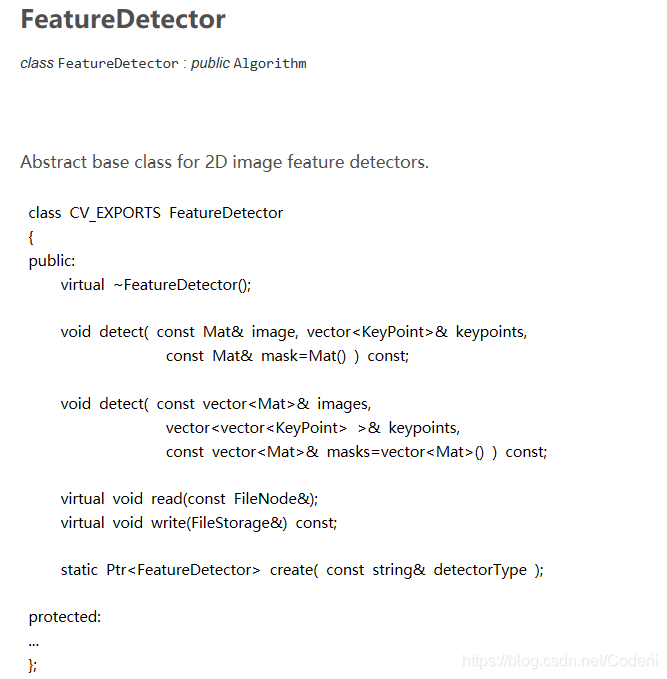
1、提取特征FeatureDetector
1.1用法:
Ptr<FeatureDetector> detecor = ORB::create();/Ptr<ORB> detecor = ORB::create();/Ptr<SURF> detector = SURF::create( minHessian ); vector<KeyPoint> keypoints_1; detector->detect( img_1, keypoints_1);
1.2数据结构:
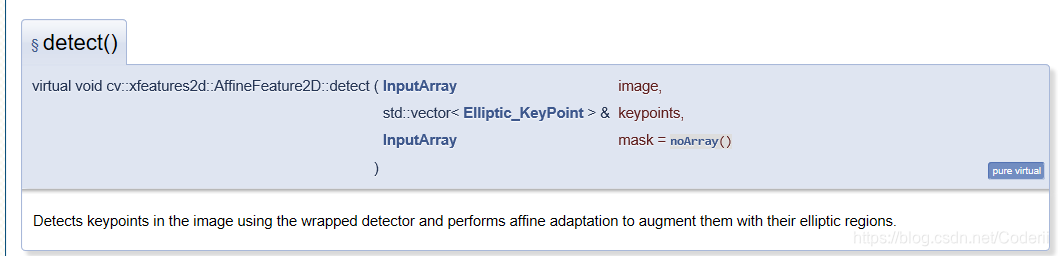
1.3其中的成员函数detect的数据结构
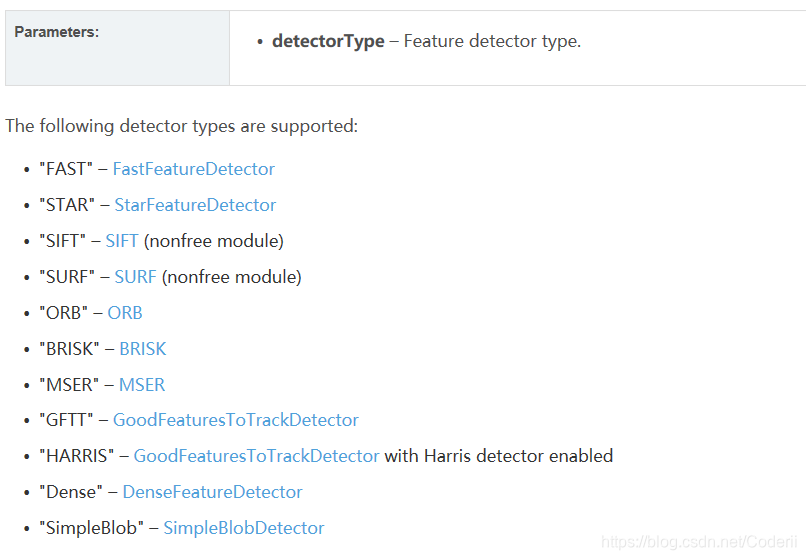
1.4其中ORB::Create函数的数据结构
CV_WRAP static Ptr<ORB> create(int nfeatures=500, float scaleFactor=1.2f, int nlevels=8, int edgeThreshold=31, int firstLevel=0, int WTA_K=2, int scoreType=ORB::HARRIS_SCORE, int patchSize=31, int fastThreshold=20);
1.5 KeyPoint的数据结构

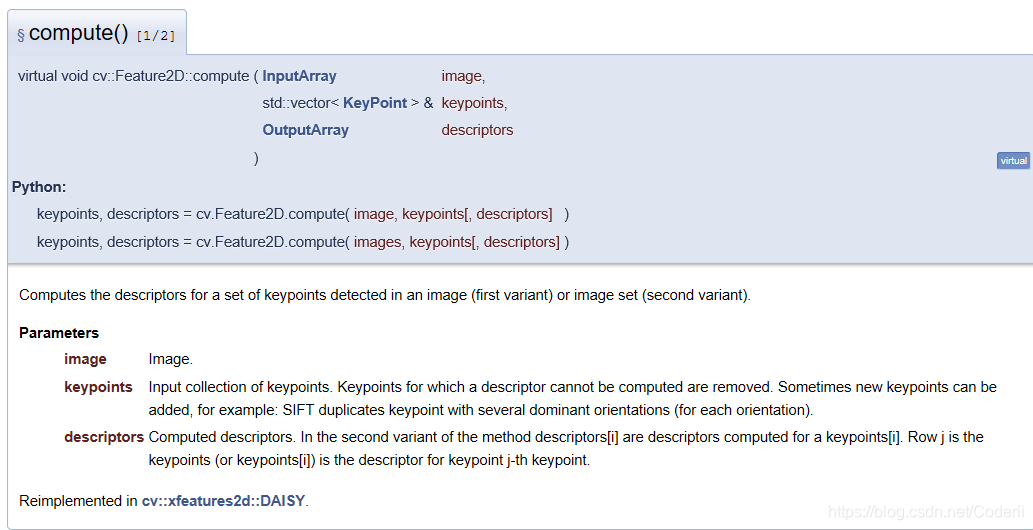
2、计算描述子DescriptorExtractor
2.1用法
Ptr<DescriptorExtractor> descriptor = ORB::create(); Mat descriptors_1; descriptor->compute( img_1, keypoints_1,descriptors_1 ); //在descriptors_1中每一行roll储存一个对应的关键点的描述子
2.2数据结构


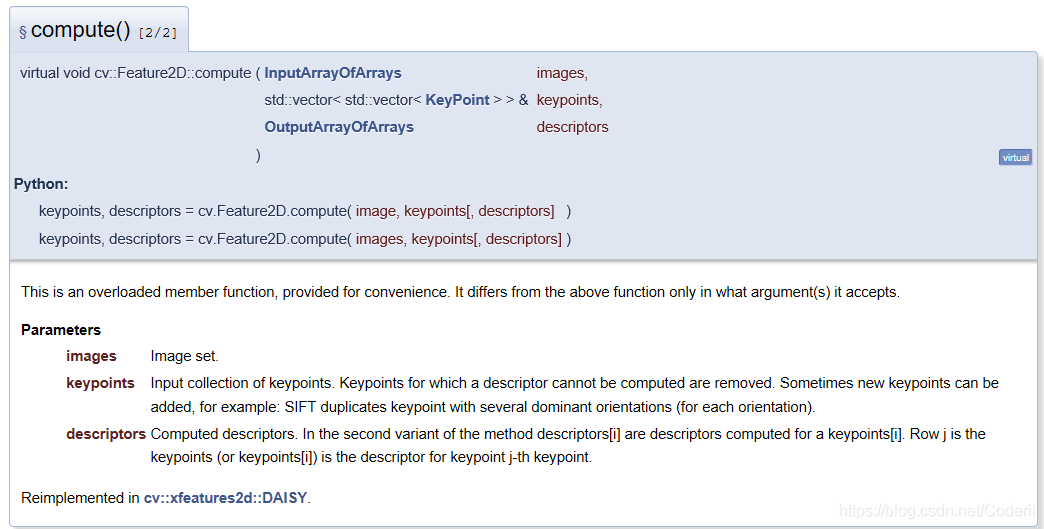
2.3其中子函数compute的数据结构
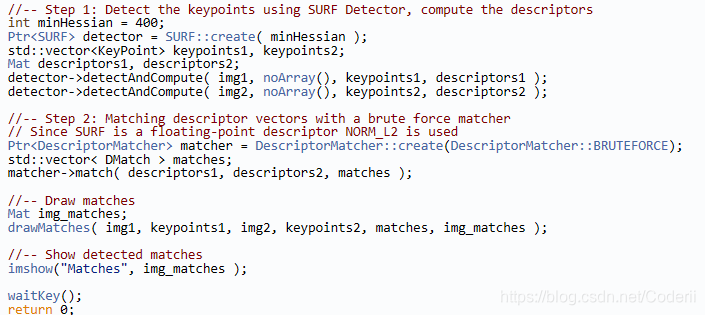
3、另一种方法:detectAndCompute函数
3.1用法
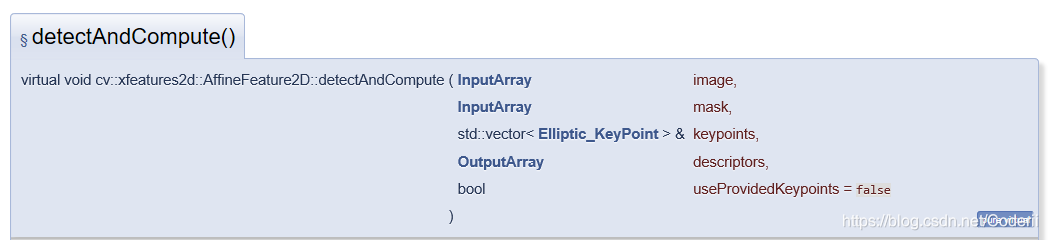
3.2数据结构
4、匹配DescriptorMatcher
4.1 用法
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create( "BruteForce-Hamming" ); vector<Dmatch> match; matcher->match(descriptors_1, descriptors_2, match);
4.2DMatch的数据结构
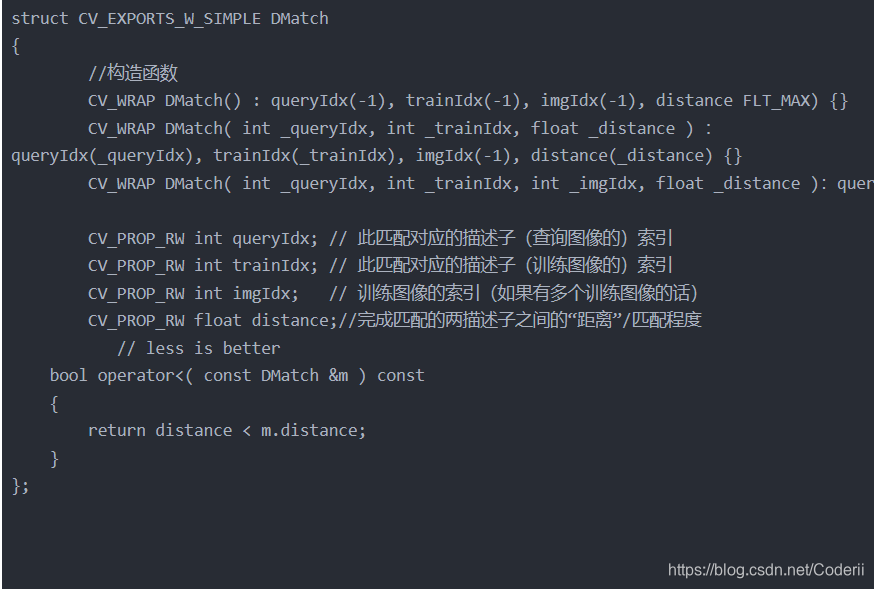
调用方式:match.distance,可以与double类型的数据比较
4.3、DescriptorMatcher的数据结构(部分)
class CV_EXPORTS_W DescriptorMatcher : public Algorithm
{
public:
enum
{
FLANNBASED = 1,
BRUTEFORCE = 2,
BRUTEFORCE_L1 = 3,
BRUTEFORCE_HAMMING = 4,
BRUTEFORCE_HAMMINGLUT = 5,
BRUTEFORCE_SL2 = 6
};
5、匹配筛选
保留距离小于max(30.0,2*最小距离)的匹配
6、关于FeatureDetector与DescriptorExtractor的说明
FeatureDetector与DescriptorExtractor都是cv::Feature2D的别名,所以两者是相同的,以上分开使用是为了能体现特征提取描述子计算的步骤,第一二步可以用下面的代码来替代
cv::Ptr<cv::Feature2D> feature = cv::ORB::create(); feature->detect( img_1, keypoints_1 ); feature->compute( img_1, keypoints_1, descriptors_1);

相关文章推荐
- 特征点匹配 opencv系列函数解析 追踪相关(一)
- OpenCV特征匹配相关结构(KeyPoint&DMatch类型简介)
- OpenCV特征匹配相关结构(KeyPoint&DMatch)
- SLAM入门之视觉里程计(1):特征点的匹配
- 视觉里程计1(slam十四讲ch7)——特征点,特征匹配
- SLAM入门之视觉里程计(1):特征点的匹配
- 立体视觉-opencv中立体匹配相关代码
- opencv库图像特征提取与匹配--参考SLAM十四讲7.2
- opencv学习笔记:特征点匹配函数使用注意
- opencv特征匹配相关结构(keypoint&DMatch类型简介)
- OpenCV特征匹配相关结构(KeyPoint&DMatch)
- 特征提取、匹配以及位姿计算(2D-2D)--参考视觉SLAM十四讲7.4
- OpenCV 兴趣点匹配函数
- OpenCV2简单的特征匹配
- Opencv下利用SIFT、SURF、ORB三种特征点实现图像匹配
- OpenCV中特征点提取和匹配的通用方法
- SIFT特征匹配中的相关问题
- OpenCV2简单的特征匹配
- OpenCV中特征点提取和匹配的通用方法
- 计算机视觉(OpenCV基础)相关网站链接