【opencv学习之三十】简单模板匹配matchTemplate
2018-02-05 22:42
766 查看
opencv实现了一部分通过模板与目标图像进行寻找最佳匹配的方面matchTemplat();这个方法网上有很多讲解,基本思想是将模板图像在目标图像上滑动逐一对比,通过统计的基本方法进行匹配,比如方差检验,相关性检验等方法来寻找最佳匹配;
话不多多说吧,从网上找到的一些实验代码,实验了一下:
1简单匹配代码:
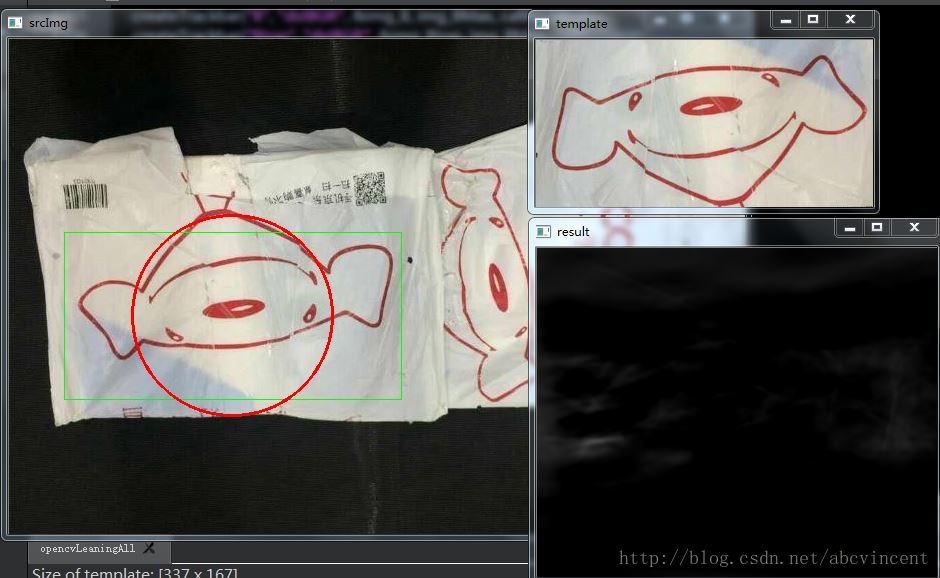
//模板匹配,简单的寻找拷贝图,效果一般
void ImgMatch()//图像匹配
{
Mat srcImg = imread("D:/ImageTest/mubiao3.jpg");
Mat tempImg = imread("D:/ImageTest/source.png");
// Mat srcImg = imread("D:/ImageTest/sudoku.png");
// Mat tempImg = imread("D:/ImageTest/m.jpg");
cout << "Size of template: "<<tempImg.size() << endl;
//1.构建结果图像resultImg(注意大小和类型)
//如果原图(待搜索图像)尺寸为W x H, 而模版尺寸为 w x h, 则结果图像尺寸一定是(W-w+1)x(H-h+1)
//结果图像必须为单通道32位浮点型图像
int width = srcImg.cols - tempImg.cols + 1;
int height = srcImg.rows - tempImg.rows + 1;
Mat resultImg(Size(width,height),CV_32FC1);
//2.模版匹配
matchTemplate(srcImg, tempImg, resultImg,CV_TM_CCOEFF_NORMED);
// CV_EXPORTS_W void matchTemplate( InputArray image, InputArray templ,
// OutputArray result, int method, InputArray mask = noArray() );
// image
// 欲搜索的图像。它应该是单通道、8-比特或32-比特 浮点数图像
// templ
// 搜索模板,不能大于输入图像,且与输入图像具有一样的数据类型
// result
// 比较结果的映射图像。单通道、32-比特浮点数. 如果图像是 W×H 而 templ 是 w×h ,则 result 一定是 (W-w+1)×(H-h+1).
// method
// 指定匹配方法:
// 函数 MatchTemplate 与函数 CalcBackProjectPatch 类似。它滑动过整个图像 image, 用指定方法比较 templ 与图像尺寸
// 为 w×h 的重叠区域,并且将比较结果存到 result 中。 下面是不同的比较方法,可以使用其中的一种 (I 表示图像,T - 模板, R - 结果.
// 模板与图像重叠区域 x'=0..w-1, y'=0..h-1 之间求和):
// CV_TM_SQDIFF : 平方差匹配,最好时候为0;
// CV_TM_SQDIFF_NORMED :归一化平方差匹配,最好时候为0;
// CV_TM_CCORR :相关性匹配法,最差为0;
// CV_TM_CCORR_NORMED :归一化相关性匹配法,最差为0;
// CV_TM_CCOEFF :系数匹配法,最好匹配为1;
// CV_TM_CCOEFF_NORMED :化相关系数匹配法,最好匹配为1;
imshow("result",resultImg);
//3.正则化(归一化到0-1)
normalize(resultImg,resultImg,0,1,NORM_MINMAX,-1);
//4.找出resultImg中的最大值及其位置
double minValue = 0;
double maxValue = 0;
Point minPosition;
Point maxPosition;
minMaxLoc(resultImg,&minValue,&maxValue,&minPosition,&maxPosition);//查找数组和子数组的全局最小值和最大值
// void minMaxLoc(InputArray src, CV_OUT double* minVal,
// CV_OUT double* maxVal = 0, CV_OUT Point* minLoc = 0,
// CV_OUT Point* maxLoc = 0, InputArray mask = noArray());
// src
// 输入图像数组, 单通道或者设置了 COI 的多通道。
// minval
// 指向返回的最小值的指针。
// maxval
// 指向返回的最大值的指针。
// minloc
// 指向返回的最小值的位置指针。
// maxloc
// 指向返回的最大值的位置指针。
// mask
// 选择一个子数组的操作掩模。
// 函数 MinMaxLoc 查找元素中的最小值和最大值以及他们的位置。函数在整个数组、
// 或选定的ROI区域(对IplImage)或当MASK不为NULL时指定的数组区域中,搜索极值 。
// 如果数组不止一个通道,它就必须是设置了 COI 的 IplImage 类型。 如果是多维数组
// minloc->x 和 maxloc->x 将包含极值的原始位置信息 (线性的)。
cout << "minValue: " << minValue << endl;
cout << "maxValue: " << maxValue << endl;
cout << "minPosition: " << minPosition << endl;
cout << "maxPosition: " << maxPosition << endl;
//5.根据resultImg中的最大值位置在源图上画出矩形
rectangle(srcImg,maxPosition,Point(maxPosition.x+tempImg.cols,maxPosition.y+tempImg.rows),Scalar(0,255,0),1,8);
circle(srcImg,Point(maxPosition.x+tempImg.cols/2,maxPosition.y+tempImg.rows/2), 100, Scalar(0, 0, 255), 2, 8);
imshow("srcImg", srcImg);
c019
imshow("template", tempImg);
waitKey(0);
}效果,对应翻转图像不敏感:
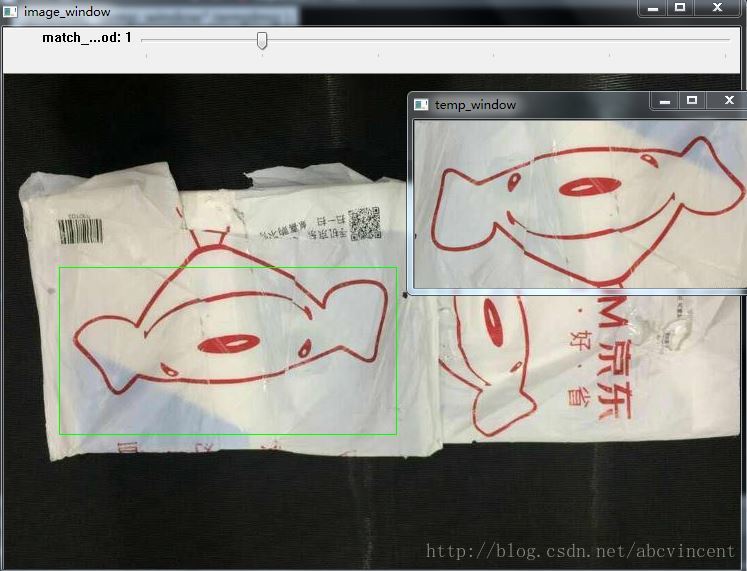
2.创建滑条调整匹配方法:
//24.图像匹配2////////////////////////
int match_method2=1;
int max_Trackbar = 5;
const char* match_method = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
void MatchingMethod( int, void* )
{
Mat srcImg = imread("D:/ImageTest/mubiao3.jpg");
Mat tempImg = imread("D:/ImageTest/source.png");
int width = srcImg.cols - tempImg.cols + 1;
int height = srcImg.rows - tempImg.rows + 1;
Mat resultImg(Size(width,height),CV_32FC1);
//2.模版匹配
matchTemplate(srcImg, tempImg, resultImg, match_method2);
//3.正则化(归一化到0-1)
normalize(resultImg,resultImg,0,1,NORM_MINMAX,-1);
//4.找出resultImg中的最大值及其位置
double minValue = 0;
double maxValue = 0;
Point minPosition;
Point maxPosition;
minMaxLoc(resultImg,&minValue,&maxValue,&minPosition,&maxPosition);
/// 对于方法 SQDIFF 和 SQDIFF_NORMED, 越小的数值代表更高的匹配结果. 而对于其他方法, 数值越大匹配越好
if( match_method2 == CV_TM_SQDIFF || match_method2 == CV_TM_SQDIFF_NORMED )
{ maxPosition= minPosition; }
else
{ maxPosition = maxPosition; }
//5.根据resultImg中的最大值位置在源图上画出矩形
rectangle(srcImg,maxPosition,Point(maxPosition.x+tempImg.cols,maxPosition.y+tempImg.rows),Scalar(0,255,0),1,8);
imshow( "image_window", srcImg);
imshow( "temp_window",tempImg );
}
void ImgMatch2()//24.图像匹配2
{
/// 创建窗口
namedWindow( "image_window", CV_WINDOW_AUTOSIZE );
namedWindow( "temp_window", CV_WINDOW_AUTOSIZE );
/// 创建滑动条
createTrackbar( "match_method", "image_window", &match_method2, max_Trackbar, MatchingMethod );
MatchingMethod( 0, 0 );
waitKey(0);
}效果:
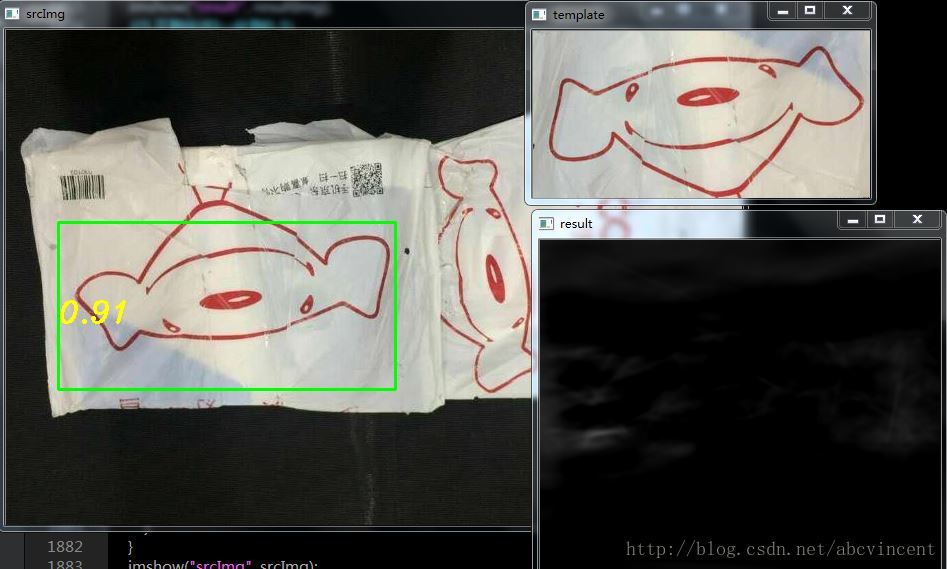
3.带匹配值方法:
void ImgMatch2()//24.图像匹配2
{
/// 创建窗口
namedWindow( "image_window", CV_WINDOW_AUTOSIZE );
namedWindow( "temp_window", CV_WINDOW_AUTOSIZE );
/// 创建滑动条
createTrackbar( "match_method", "image_window", &match_method2, max_Trackbar, MatchingMethod );
MatchingMethod( 0, 0 );
waitKey(0);
}
void ImgMatch3()//24.图像匹配3
{
Mat srcImg = imread("D:/ImageTest/mubiao3.jpg");
Mat tempImg = imread("D:/ImageTest/source.png");
//1.构建结果图像resultImg(注意大小和类型)
//如果原图(待搜索图像)尺寸为W x H, 而模版尺寸为 w x h, 则结果图像尺寸一定是(W-w+1)x(H-h+1)
//结果图像必须为单通道32位浮点型图像
int width = srcImg.cols - tempImg.cols + 1;
int height = srcImg.rows - tempImg.rows + 1;
Mat resultImg(Size(width, height), CV_32FC1);
//2.模版匹配
matchTemplate(srcImg, tempImg, resultImg, CV_TM_CCOEFF_NORMED);
imshow("result", resultImg);
//3.正则化(归一化到0-1)
normalize(resultImg, resultImg, 0, 1, NORM_MINMAX, -1);
//4.遍历resultImg,给定筛选条件,筛选出前几个匹配位置
int tempX = 0;
int tempY = 0;
char prob[10] = { 0 };
//4.1遍历resultImg
for (int i = 0 ; i<resultImg.rows;i++)
{
for (int j = 0; j<resultImg.cols; j++)
{
//4.2获得resultImg中(j,x)位置的匹配值matchValue
double matchValue = resultImg.at<float>(i, j);
sprintf(prob, "%.2f", matchValue);
//4.3给定筛选条件
//条件1:概率值大于0.9
//条件2:任何选中的点在x方向和y方向上都要比上一个点大5
if (matchValue > 0.9&& abs(i-tempY)>5&&abs(j-tempX)>5)
{
//5.给筛选出的点画出边框和文字
rectangle(srcImg, Point(j,i), Point(j + tempImg.cols, i + tempImg.rows), Scalar(0, 255, 0), 2, 8);
putText(srcImg, prob, Point(j, i+100),CV_FONT_BLACK,1,Scalar(0,255,255),2);
tempX = j;
tempY = i;
}
}
}
imshow("srcImg", srcImg);
imshow("template", tempImg);
waitKey(0);
}效果:
话不多多说吧,从网上找到的一些实验代码,实验了一下:
1简单匹配代码:
//模板匹配,简单的寻找拷贝图,效果一般
void ImgMatch()//图像匹配
{
Mat srcImg = imread("D:/ImageTest/mubiao3.jpg");
Mat tempImg = imread("D:/ImageTest/source.png");
// Mat srcImg = imread("D:/ImageTest/sudoku.png");
// Mat tempImg = imread("D:/ImageTest/m.jpg");
cout << "Size of template: "<<tempImg.size() << endl;
//1.构建结果图像resultImg(注意大小和类型)
//如果原图(待搜索图像)尺寸为W x H, 而模版尺寸为 w x h, 则结果图像尺寸一定是(W-w+1)x(H-h+1)
//结果图像必须为单通道32位浮点型图像
int width = srcImg.cols - tempImg.cols + 1;
int height = srcImg.rows - tempImg.rows + 1;
Mat resultImg(Size(width,height),CV_32FC1);
//2.模版匹配
matchTemplate(srcImg, tempImg, resultImg,CV_TM_CCOEFF_NORMED);
// CV_EXPORTS_W void matchTemplate( InputArray image, InputArray templ,
// OutputArray result, int method, InputArray mask = noArray() );
// image
// 欲搜索的图像。它应该是单通道、8-比特或32-比特 浮点数图像
// templ
// 搜索模板,不能大于输入图像,且与输入图像具有一样的数据类型
// result
// 比较结果的映射图像。单通道、32-比特浮点数. 如果图像是 W×H 而 templ 是 w×h ,则 result 一定是 (W-w+1)×(H-h+1).
// method
// 指定匹配方法:
// 函数 MatchTemplate 与函数 CalcBackProjectPatch 类似。它滑动过整个图像 image, 用指定方法比较 templ 与图像尺寸
// 为 w×h 的重叠区域,并且将比较结果存到 result 中。 下面是不同的比较方法,可以使用其中的一种 (I 表示图像,T - 模板, R - 结果.
// 模板与图像重叠区域 x'=0..w-1, y'=0..h-1 之间求和):
// CV_TM_SQDIFF : 平方差匹配,最好时候为0;
// CV_TM_SQDIFF_NORMED :归一化平方差匹配,最好时候为0;
// CV_TM_CCORR :相关性匹配法,最差为0;
// CV_TM_CCORR_NORMED :归一化相关性匹配法,最差为0;
// CV_TM_CCOEFF :系数匹配法,最好匹配为1;
// CV_TM_CCOEFF_NORMED :化相关系数匹配法,最好匹配为1;
imshow("result",resultImg);
//3.正则化(归一化到0-1)
normalize(resultImg,resultImg,0,1,NORM_MINMAX,-1);
//4.找出resultImg中的最大值及其位置
double minValue = 0;
double maxValue = 0;
Point minPosition;
Point maxPosition;
minMaxLoc(resultImg,&minValue,&maxValue,&minPosition,&maxPosition);//查找数组和子数组的全局最小值和最大值
// void minMaxLoc(InputArray src, CV_OUT double* minVal,
// CV_OUT double* maxVal = 0, CV_OUT Point* minLoc = 0,
// CV_OUT Point* maxLoc = 0, InputArray mask = noArray());
// src
// 输入图像数组, 单通道或者设置了 COI 的多通道。
// minval
// 指向返回的最小值的指针。
// maxval
// 指向返回的最大值的指针。
// minloc
// 指向返回的最小值的位置指针。
// maxloc
// 指向返回的最大值的位置指针。
// mask
// 选择一个子数组的操作掩模。
// 函数 MinMaxLoc 查找元素中的最小值和最大值以及他们的位置。函数在整个数组、
// 或选定的ROI区域(对IplImage)或当MASK不为NULL时指定的数组区域中,搜索极值 。
// 如果数组不止一个通道,它就必须是设置了 COI 的 IplImage 类型。 如果是多维数组
// minloc->x 和 maxloc->x 将包含极值的原始位置信息 (线性的)。
cout << "minValue: " << minValue << endl;
cout << "maxValue: " << maxValue << endl;
cout << "minPosition: " << minPosition << endl;
cout << "maxPosition: " << maxPosition << endl;
//5.根据resultImg中的最大值位置在源图上画出矩形
rectangle(srcImg,maxPosition,Point(maxPosition.x+tempImg.cols,maxPosition.y+tempImg.rows),Scalar(0,255,0),1,8);
circle(srcImg,Point(maxPosition.x+tempImg.cols/2,maxPosition.y+tempImg.rows/2), 100, Scalar(0, 0, 255), 2, 8);
imshow("srcImg", srcImg);
c019
imshow("template", tempImg);
waitKey(0);
}效果,对应翻转图像不敏感:
2.创建滑条调整匹配方法:
//24.图像匹配2////////////////////////
int match_method2=1;
int max_Trackbar = 5;
const char* match_method = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
void MatchingMethod( int, void* )
{
Mat srcImg = imread("D:/ImageTest/mubiao3.jpg");
Mat tempImg = imread("D:/ImageTest/source.png");
int width = srcImg.cols - tempImg.cols + 1;
int height = srcImg.rows - tempImg.rows + 1;
Mat resultImg(Size(width,height),CV_32FC1);
//2.模版匹配
matchTemplate(srcImg, tempImg, resultImg, match_method2);
//3.正则化(归一化到0-1)
normalize(resultImg,resultImg,0,1,NORM_MINMAX,-1);
//4.找出resultImg中的最大值及其位置
double minValue = 0;
double maxValue = 0;
Point minPosition;
Point maxPosition;
minMaxLoc(resultImg,&minValue,&maxValue,&minPosition,&maxPosition);
/// 对于方法 SQDIFF 和 SQDIFF_NORMED, 越小的数值代表更高的匹配结果. 而对于其他方法, 数值越大匹配越好
if( match_method2 == CV_TM_SQDIFF || match_method2 == CV_TM_SQDIFF_NORMED )
{ maxPosition= minPosition; }
else
{ maxPosition = maxPosition; }
//5.根据resultImg中的最大值位置在源图上画出矩形
rectangle(srcImg,maxPosition,Point(maxPosition.x+tempImg.cols,maxPosition.y+tempImg.rows),Scalar(0,255,0),1,8);
imshow( "image_window", srcImg);
imshow( "temp_window",tempImg );
}
void ImgMatch2()//24.图像匹配2
{
/// 创建窗口
namedWindow( "image_window", CV_WINDOW_AUTOSIZE );
namedWindow( "temp_window", CV_WINDOW_AUTOSIZE );
/// 创建滑动条
createTrackbar( "match_method", "image_window", &match_method2, max_Trackbar, MatchingMethod );
MatchingMethod( 0, 0 );
waitKey(0);
}效果:
3.带匹配值方法:
void ImgMatch2()//24.图像匹配2
{
/// 创建窗口
namedWindow( "image_window", CV_WINDOW_AUTOSIZE );
namedWindow( "temp_window", CV_WINDOW_AUTOSIZE );
/// 创建滑动条
createTrackbar( "match_method", "image_window", &match_method2, max_Trackbar, MatchingMethod );
MatchingMethod( 0, 0 );
waitKey(0);
}
void ImgMatch3()//24.图像匹配3
{
Mat srcImg = imread("D:/ImageTest/mubiao3.jpg");
Mat tempImg = imread("D:/ImageTest/source.png");
//1.构建结果图像resultImg(注意大小和类型)
//如果原图(待搜索图像)尺寸为W x H, 而模版尺寸为 w x h, 则结果图像尺寸一定是(W-w+1)x(H-h+1)
//结果图像必须为单通道32位浮点型图像
int width = srcImg.cols - tempImg.cols + 1;
int height = srcImg.rows - tempImg.rows + 1;
Mat resultImg(Size(width, height), CV_32FC1);
//2.模版匹配
matchTemplate(srcImg, tempImg, resultImg, CV_TM_CCOEFF_NORMED);
imshow("result", resultImg);
//3.正则化(归一化到0-1)
normalize(resultImg, resultImg, 0, 1, NORM_MINMAX, -1);
//4.遍历resultImg,给定筛选条件,筛选出前几个匹配位置
int tempX = 0;
int tempY = 0;
char prob[10] = { 0 };
//4.1遍历resultImg
for (int i = 0 ; i<resultImg.rows;i++)
{
for (int j = 0; j<resultImg.cols; j++)
{
//4.2获得resultImg中(j,x)位置的匹配值matchValue
double matchValue = resultImg.at<float>(i, j);
sprintf(prob, "%.2f", matchValue);
//4.3给定筛选条件
//条件1:概率值大于0.9
//条件2:任何选中的点在x方向和y方向上都要比上一个点大5
if (matchValue > 0.9&& abs(i-tempY)>5&&abs(j-tempX)>5)
{
//5.给筛选出的点画出边框和文字
rectangle(srcImg, Point(j,i), Point(j + tempImg.cols, i + tempImg.rows), Scalar(0, 255, 0), 2, 8);
putText(srcImg, prob, Point(j, i+100),CV_FONT_BLACK,1,Scalar(0,255,255),2);
tempX = j;
tempY = i;
}
}
}
imshow("srcImg", srcImg);
imshow("template", tempImg);
waitKey(0);
}效果:

相关文章推荐
- opencv_tutorial_code学习——matchTemplate模板匹配
- OpenCV学习二十六:matchTemplate,模板匹配
- opencv学习: 模板匹配函数matchTemplate
- opencv学习-imgprocess-模板匹配matchTemplate
- opencv学习(三十八)之图像模板匹配matchTemplate()
- opencv 模板匹配matchTemplate研究之一
- opencv 模板匹配(cvMatchTemplate)
- ROS_OpenCV2_MatchTemplate模板匹配
- OpenCV模板匹配函数:matchTemplate()介绍
- OpenCV中的模板匹配函数:cvMatchTemplate
- opencv关于模板匹配cvMatchTemplate的运用
- Opencv使用cv::matchTemplate进行模板匹配
- OpenCV matchTemplate模板匹配
- opencv 模板匹配(cvMatchTemplate)
- Opencv模板匹配matchTemplate
- opencv 模板匹配matchTemplate研究之二
- 使用Opencv中matchTemplate模板匹配方法跟踪移动目标
- 【OpenCV3】模板匹配——cv::matchTemplate()详解
- opencv中cvMatchTemplate模板匹配
- 使用Opencv中matchTemplate模板匹配方法跟踪移动目标