罗德里格斯转换公式推导
2017-12-07 09:23
141 查看
最近在学习SLAM,主要的学习资料为高翔的《视觉SLAM十四讲》,首先安利一下这本书,这本书由浅入的介绍了SLAM的整体结构,算法介绍与实际应用。可以说是一本既是通俗有趣的高科技讲义,又是一本足以指导研发实践的翔实教程。
在书籍第三讲,关于三维空间刚体运动中,由于转动矩阵的数值计算较为复杂,所以提出了转动向量的概念,即转动向量的方向空间刚体转动的转动轴,向量的模代表着转动的的角度,代表轴的方向的单位向量,所以旋转矩阵R所对应的转动向量为。两者之间的关系为:
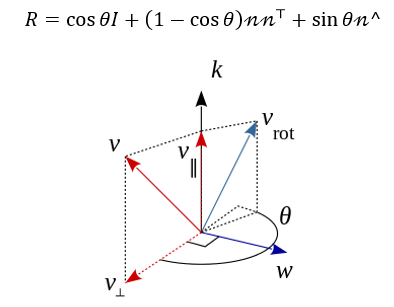

我们可以看到旋转轴向量可以通过

得到轴的单位向量。且:

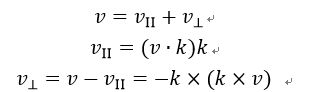
且垂直分量和平行分量各自的旋转分量为:

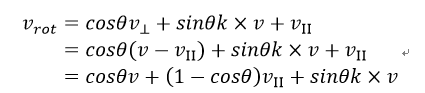
所以转动后的;将前面的各式代入可以得到:

上述表达为矢量运算的表达式,对于矩阵运算,形式需要改变一下。首先就在线性变换中,可以采取一种反对称矩阵进行矩阵变换,其中为:

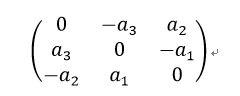
则:

所以:


则可以令,则由上式可以的到:

因此可以得到书中所得到的罗德里格斯转换公式了。
在书籍第三讲,关于三维空间刚体运动中,由于转动矩阵的数值计算较为复杂,所以提出了转动向量的概念,即转动向量的方向空间刚体转动的转动轴,向量的模代表着转动的的角度,代表轴的方向的单位向量,所以旋转矩阵R所对应的转动向量为。两者之间的关系为:
我们可以看到旋转轴向量可以通过
得到轴的单位向量。且:
且垂直分量和平行分量各自的旋转分量为:
所以转动后的;将前面的各式代入可以得到:
上述表达为矢量运算的表达式,对于矩阵运算,形式需要改变一下。首先就在线性变换中,可以采取一种反对称矩阵进行矩阵变换,其中为:
则:
所以:
则可以令,则由上式可以的到:
因此可以得到书中所得到的罗德里格斯转换公式了。

相关文章推荐
- 罗德里格斯公式的推导过程
- 罗德里格斯公式 理解、推导
- 弧度与角度的转换公式推导
- 不同平面直角坐标系之间的转换公式的推导及C#代码实现
- R-2R”T“形电阻网络D/A转换公式推导
- 关于罗德里格斯公式的简单推导
- YJX_Driver_020_JMP地址转换公式推导
- 2D与2.5D坐标转换公式推导
- JMP指令转换公式推导
- 吴恩达老师深度学习视频课笔记:逻辑回归公式推导及C++实现
- 二维图形变换公式推导---------旋转变换
- poj 3244 Difference between Triplets 最值公式推导
- 透视纹理校正公式推导
- 数论相关公式的推导
- 【Matlab】Matlab公式转换为LaTeX公式
- 关于感知学习模型机中空间任一点到超平面的距离公式的推导过程
- 逻辑回归迭代公式推导
- Sumdiv 数论提 (数学很重要),这道题中算法变成了次要因素,数学才是最重要的,注意其中的一个经典公式(求因数和的)(很好推导)
- 交叉熵代价函数+方向导数+梯度(详细作用及公式推导)
- 泊松分布的来源—公式推导—应用