Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields 个人解读
2017-11-16 15:30
549 查看
一.论文的简介
Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields提出了一种多人姿态估计的新方法,通过卷积神经网络输出四肢的位置和矢量信息,通过图的匹配把各个关键点连接在一起,从而实现人体姿态估计.该系统在COCO 2016 keypoints challenge和MPII Multi-Person benchmark上都获得第一的优秀成绩.
二、2D人体姿态估计存在的挑战
复杂的图片背景;人与人之间肢体相互接触等相互作用引起复杂的空间干扰;
图片中的人数、人的位置、尺度,人数会影响计算消耗的时间。

三、 主流的姿态估计方法
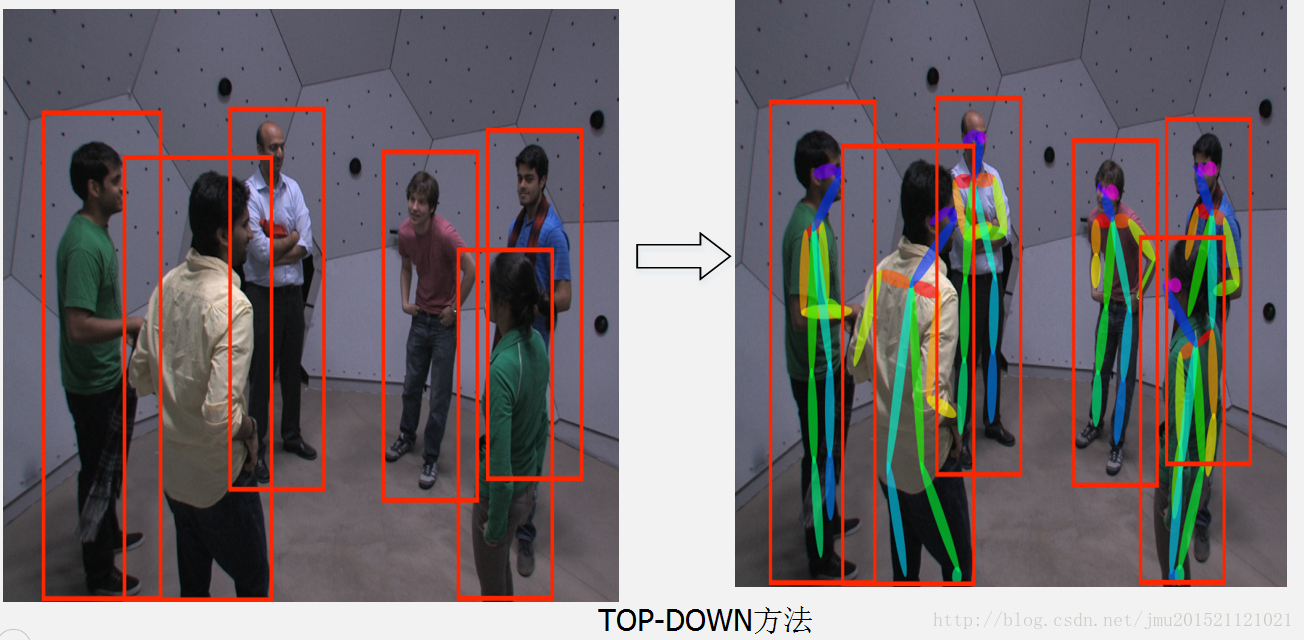
本文介绍了top-down和down-top两种主流人体姿态检测方法。top-down 方法先检测出一个人,再对这个人进行姿态估计。down-top是先检测处关键点,再通过推理来确定每个人的姿态。top-down方法,由于需要先检测出人,所以计算时间随着图片中人数的增加而增加。如果检测的人属于false positive就会输出错误的姿态。
down-top方法主要挑战是在怎么处理各个关键点之间的关联,例如采用全连接图去解决,会出现NP-hard problem。
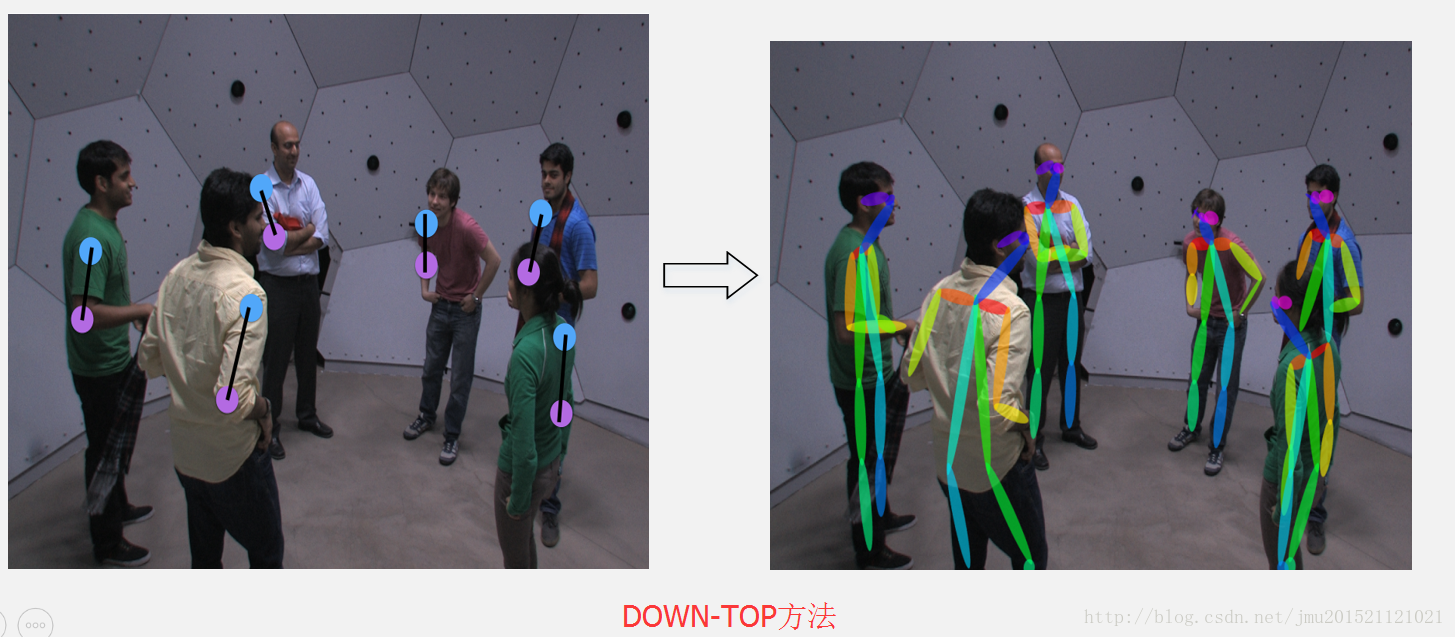
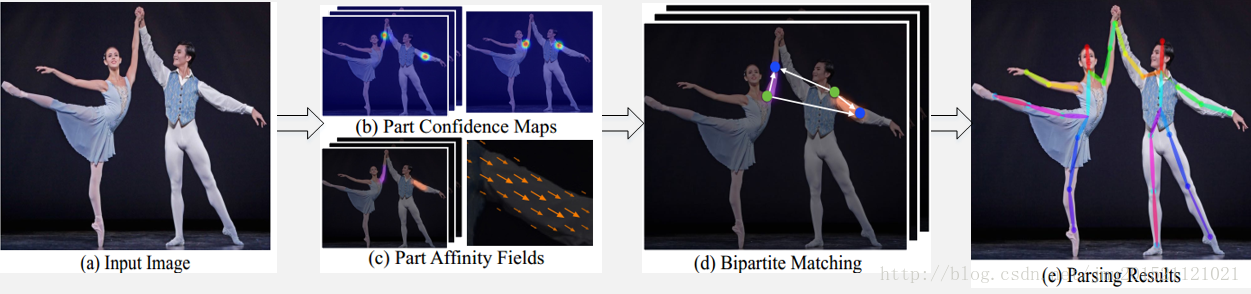
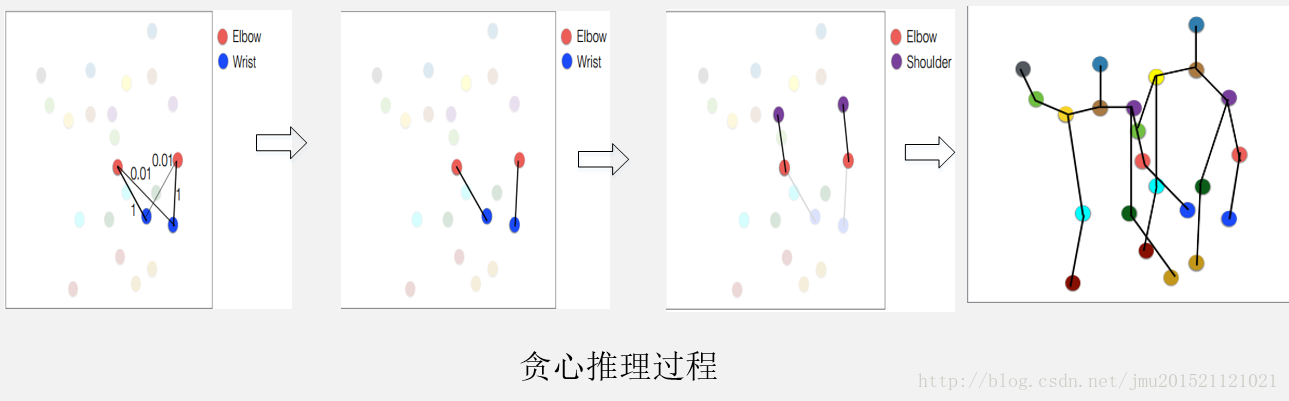
本文中使用的方法是down-top。通过卷积神经网络提取一张图片中的部位置信图和部位亲和向量场,再把两者结合起来通过贪心推理和图的匹配输出每个人的姿态。
四、深度神经网络的结构
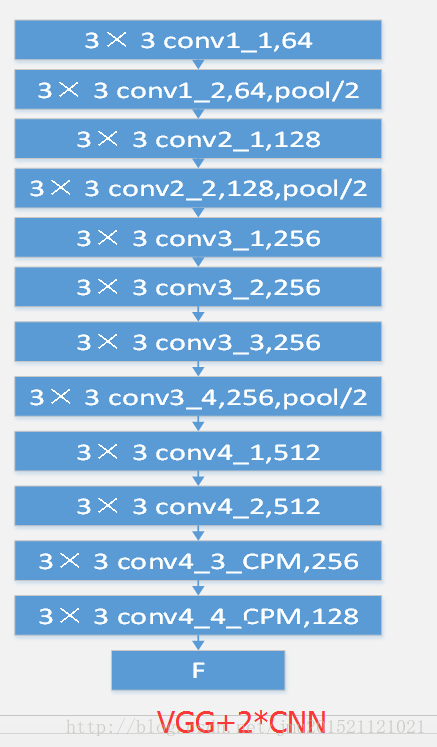
网络结构是由{VGG-19的前十层+两层CNN}和{CNN-Branch1、CNN-Branch2}两个部分组成。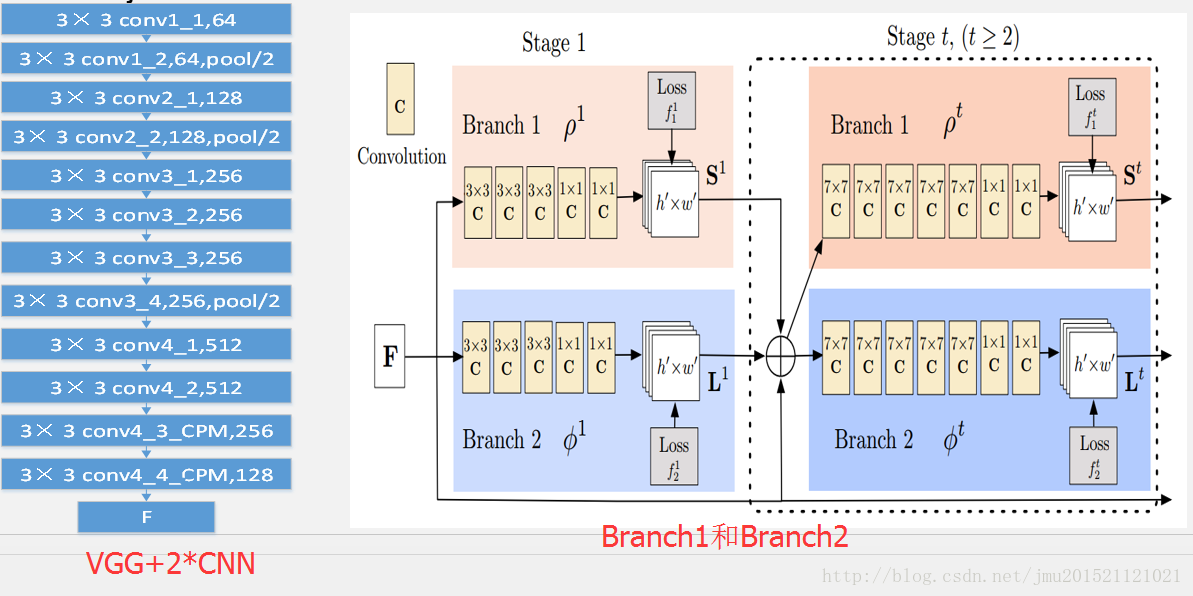
网络第一部分,是由VGG前10层+2个CNN组成,输出feature maps F。每个conv层kernel为3,stride为1,pad为1。Pooling层,采用MaxPooling,kernel为2,stride为2。假设网络数据输入层大小为w*h,则第
4000
一部分网络输出F的维度为128*w/8*h/8。
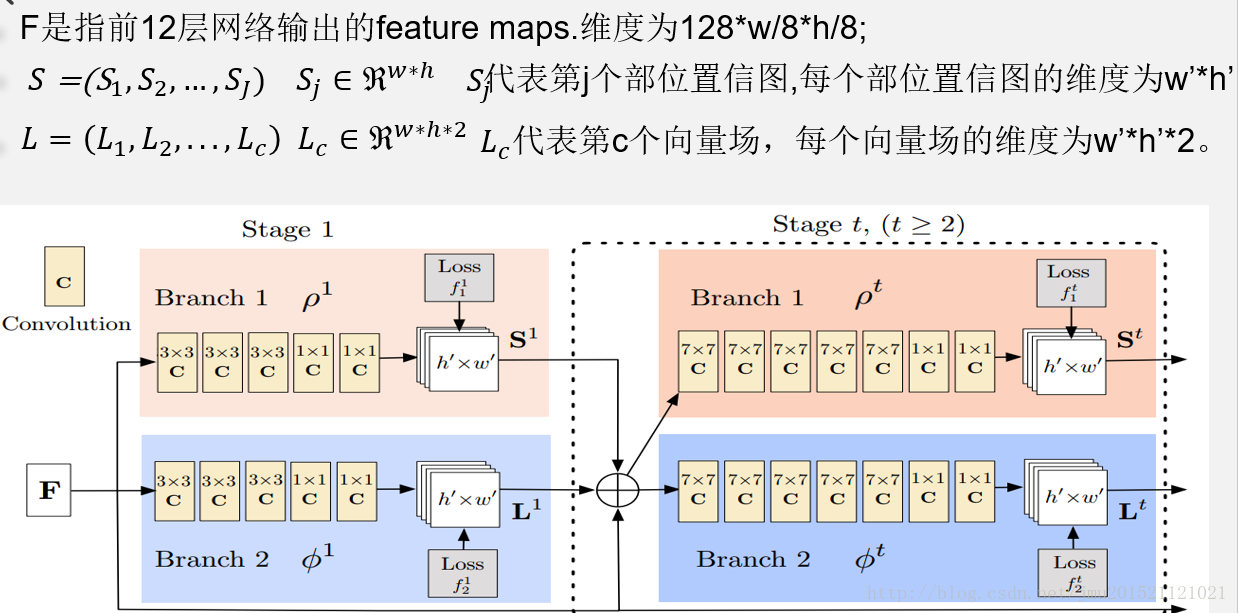
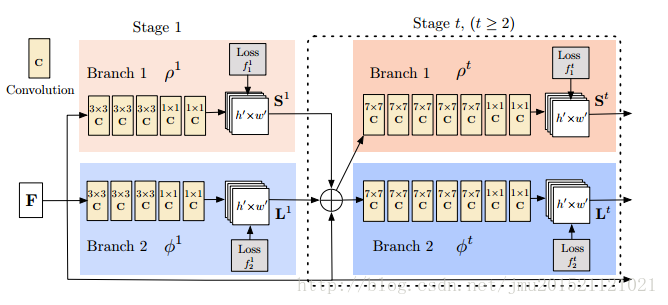
Branch1和Branch2两个网络是级联网络的结构,时间序列t {1,2,3,…,T}.当t=1,F为两个卷积神经网络的输入,两个卷积神经网络分别输出部位置信图S1和部位亲和向量场L1 .接下来2-T步,St−1、Lt−1、F三者进行融合做为Branch1和Branch2的输入,融合方式为每个map罗列在一起。重复T-1次,最终输出 St 和 Lt。
Branch1和Branch2网络Loss层
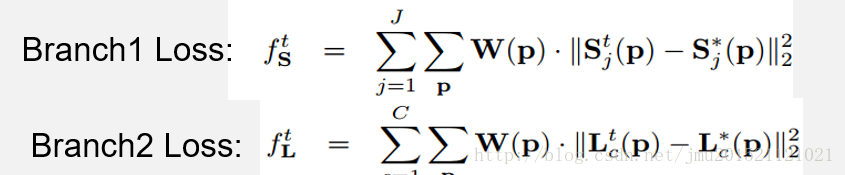
W(p)是权重,当位置p没有标注,则W(p)=0,避免训练期间true positive预测错误。
Stj(p)是指Branch1在第t个网络中输出的第j个部位置信图上p点的置信值。S∗j(p)是指ground truth的第j个身体部位图上p点的置信值。
Ltc(p)是 Branch2在第t个网络中输出的第j个部位亲和向量场上p点的向量。L∗c(p)是指ground truth的第j个身体部位亲和向量场上p点的向量。
解决梯度消失的方法
为了解决梯度消失,周期性的补充梯度f. 具体做法:先求每一步的branch1的loss fts 和branch2的loss ftL 的和,最后再求总f。
五、Part Confidence Maps
在训练的时候,S*是指图片中标记的身体部位的置信图。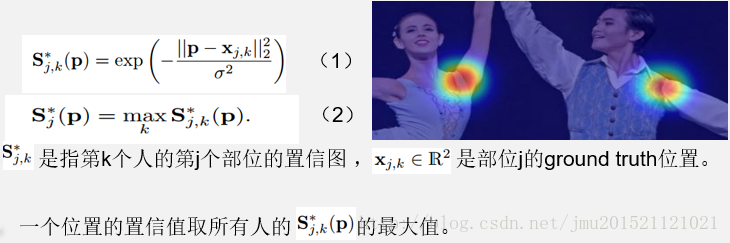
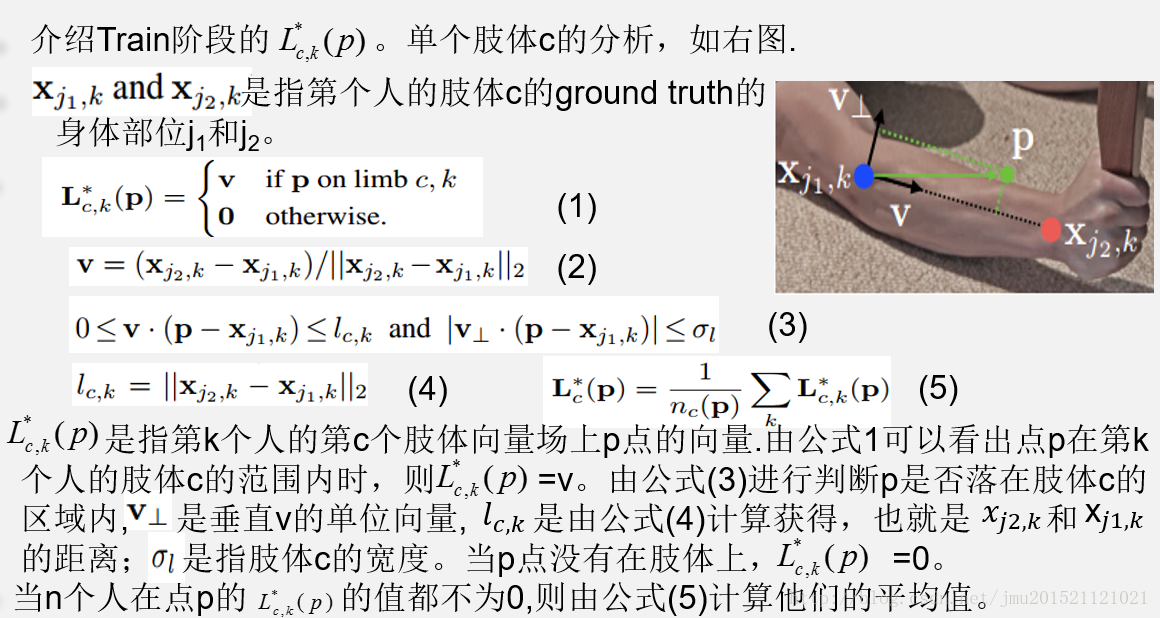
六、Part Affinity Fields
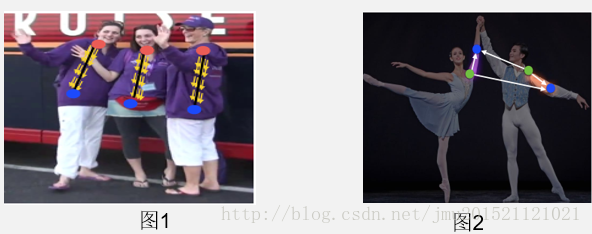
Part Affinity Fields是本文的核心内容,Part Affinity Fields是指在肢体区域内保存位置和方向信息,以2D的向量场表示,如图1。以每个肢体关键点都指向别的肢体,如图2所示。每种肢体都有一个相应的Affinity Field 连接它相关的身体部位。
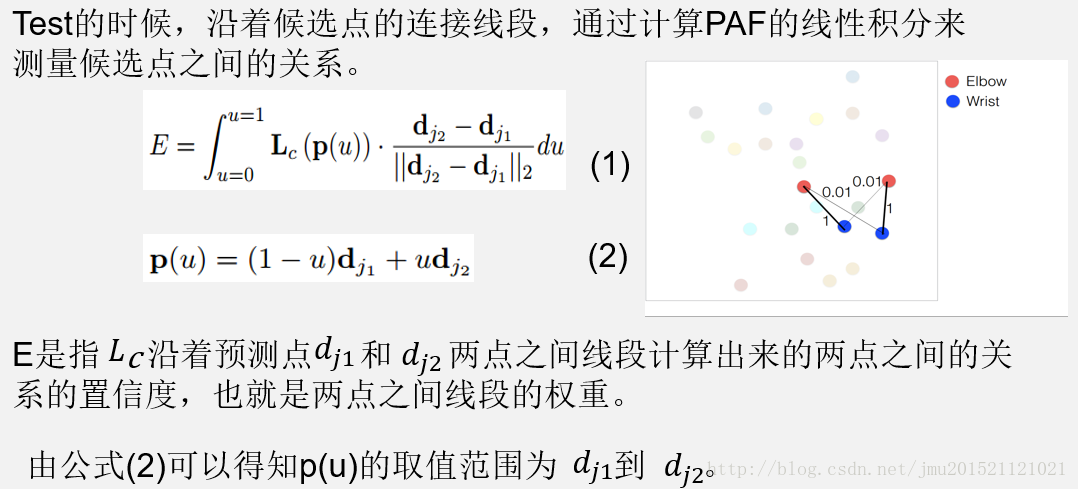
六、Multi-Person Parsing using PAFs
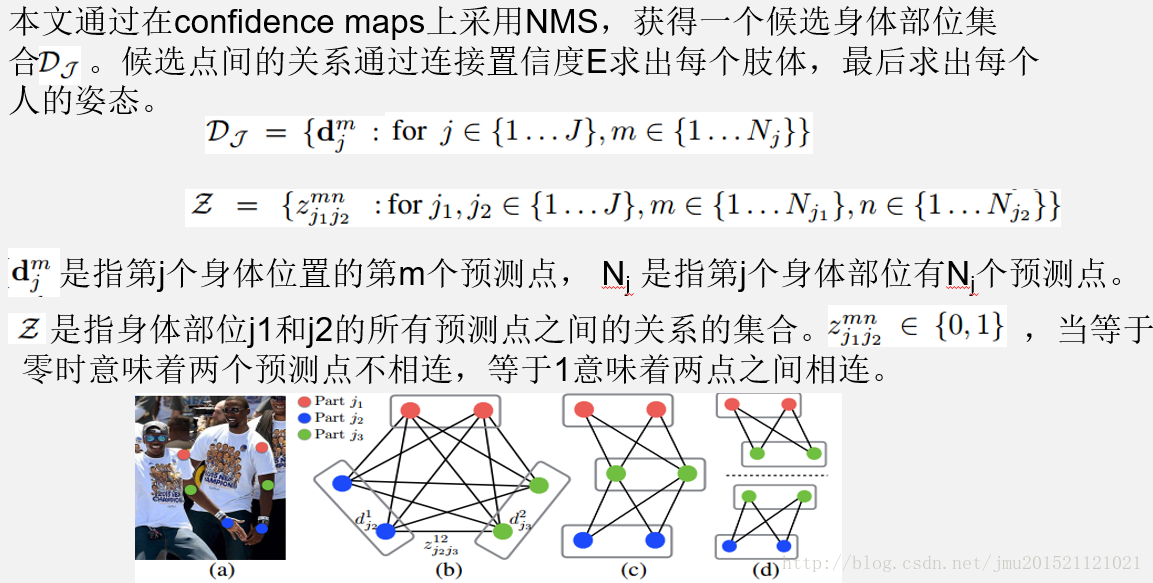
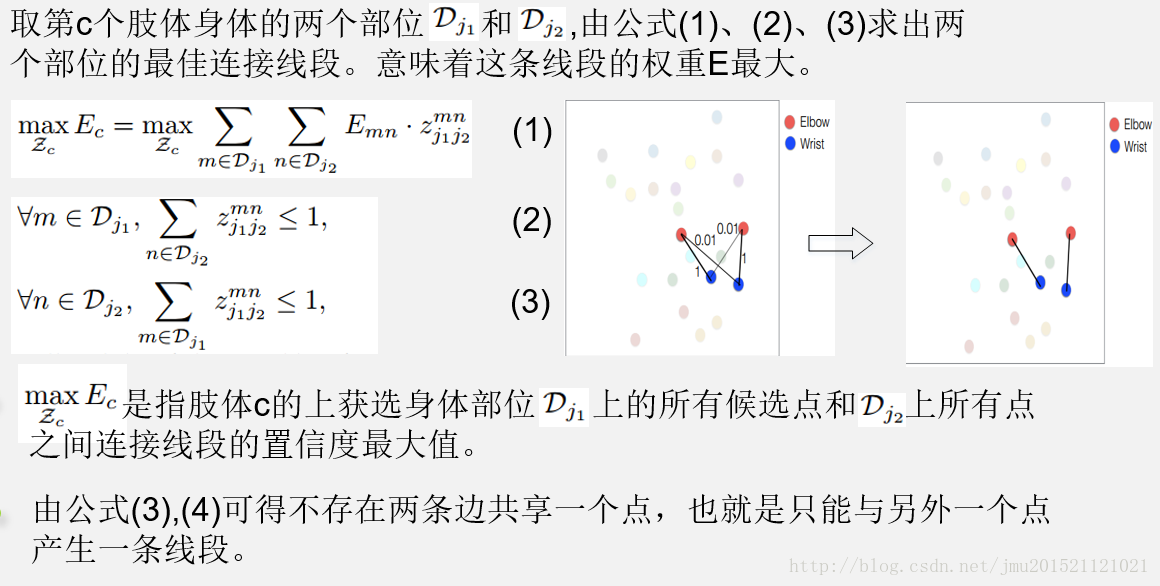
在一张图有多个人的情况下, 的取值是一个NP-hard问题。本文中提出了两种优化方法:①以最少边数来获得人体姿态的生成树c而不是采用完全图b。②把匹配问题分解为两个匹配子问题并单独确定相邻子节点的匹配,如图d。

相关文章推荐
- 论文阅读:RealTime Multi-Person 2D Pose Estimation using Part Affinity Fields
- Paper Reading:Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- Code note: Realtime Multi-person 2D Pose estimation using Part Affinity Fields(2)
- Paper reading: Realtime Multi-person 2D Pose estimation using Part Affinity Fields(1)
- READING NOTE: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- caffe openpose/Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields配置(转)
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields ∗ 实时多人人体姿态估计论文原理讲解
- 论文阅读-Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- 论文阅读笔记: 2017 cvpr Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- [OpenPose翻译] Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields ∗原文翻译(注释版)
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields ∗
- 行人姿态估计--Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- 姿态估计论文思路整理 -- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- 姿态论文整理--02-Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- 论文阅读:《Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields》CVPR 2017
- 拜读曹哲的Realtime Multi-Person 2D Pose Estimation using Part Affinity Fileds
- Head Pose Estimation From a 2D Face Image Using 3D Face Morphing With Depth Parameters [2015]
- Human Pose Matching on mobile — a fun application using Human Pose Estimation (Part 1 Intro)
- PCL学习(四)——Cluster Recognition and 6DOF Pose Estimation using VFH descriptors