[置顶] 利用对极几何求解相机的运动
2017-07-04 20:16
351 查看
PS::大家好,接下来我将推导下本质矩阵的由来,什么叫做对极约束,得到匹配点怎么来计算本质矩阵?什么是八点法?得到本质矩阵之后如何得到相机的外参?
这里相机坐标系为,图像和坐标为O,这里假设焦距为1;图像坐标中心早光轴上。
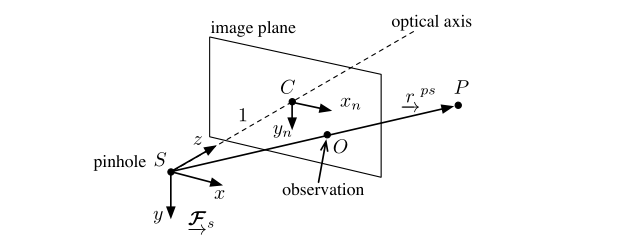
空间中点P在摄像机坐标系下的三维坐标:
利用三角近似关系,P点的图像坐标(齐次坐标);
同时假设已知图像坐标,反推会发现只能得到空间坐标的两个约束关系,或者说Z可以是任意值都满足约束关系,即深度无法得到;
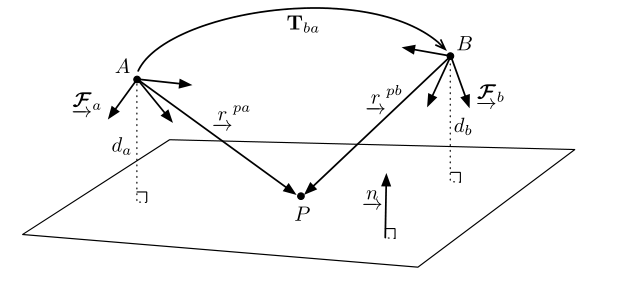
相机在不同时刻两帧图像同时观察到空间点P,如图:
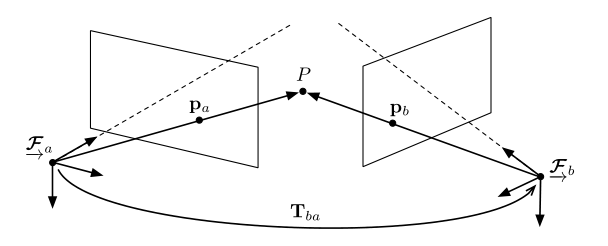
P在两帧上的图像坐标满足几何约束:

其中称为本质矩阵,其参数由运动的pose决定,与相机内参无关;本质矩阵在位姿估计和相机标定上很有用;
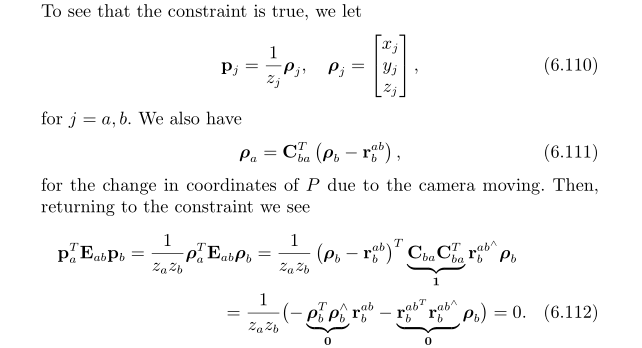
约束关系的证明:
什么叫做对极约束?
如何计算本质矩阵?
如何计算相机外参?什么是SVD?
如何遇到不存在对极几何关系,如何来估计相机的运动?
什么是单应矩阵?
空间点三维坐标到像素坐标(齐次形式)的转换:
如果已知观察的点在某个平面上,利用平面方程的先验信息可以估计出深度
已知相机中心到平面距离和法向量,可以得平面的法线方程

将空间坐标替换为像素坐标:

替换掉,得到由像素齐次坐标到空间坐标的转换
空间点在前后两帧坐标系下的三维坐标的约束关系
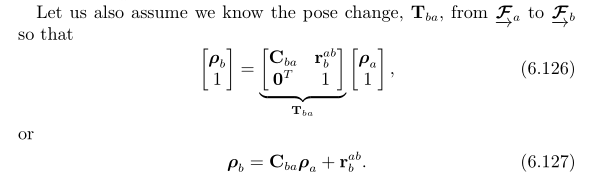
带入第一个公式,得到两帧之间同一空间点的像素点坐标的约束关系
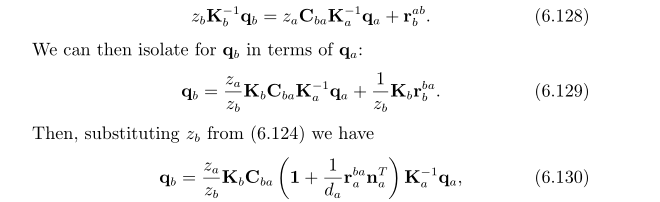
将上述公式简写为:

矩阵称为单应矩阵,其中用来度量图像的齐次坐标,可以去掉;所以单应矩阵是pose和平面参数的矩阵;
利用单应矩阵得到相机的外参?
1.归一化图像坐标
这里相机坐标系为,图像和坐标为O,这里假设焦距为1;图像坐标中心早光轴上。空间中点P在摄像机坐标系下的三维坐标:
利用三角近似关系,P点的图像坐标(齐次坐标);
同时假设已知图像坐标,反推会发现只能得到空间坐标的两个约束关系,或者说Z可以是任意值都满足约束关系,即深度无法得到;
2.本质矩阵 essential matrix
2.1 本质矩阵的推导
相机在不同时刻两帧图像同时观察到空间点P,如图:P在两帧上的图像坐标满足几何约束:
其中称为本质矩阵,其参数由运动的pose决定,与相机内参无关;本质矩阵在位姿估计和相机标定上很有用;
约束关系的证明:
什么叫做对极约束?
如何计算本质矩阵?
如何计算相机外参?什么是SVD?
如何遇到不存在对极几何关系,如何来估计相机的运动?
什么是单应矩阵?
空间点三维坐标到像素坐标(齐次形式)的转换:
如果已知观察的点在某个平面上,利用平面方程的先验信息可以估计出深度
已知相机中心到平面距离和法向量,可以得平面的法线方程
将空间坐标替换为像素坐标:
替换掉,得到由像素齐次坐标到空间坐标的转换
空间点在前后两帧坐标系下的三维坐标的约束关系
带入第一个公式,得到两帧之间同一空间点的像素点坐标的约束关系
将上述公式简写为:
矩阵称为单应矩阵,其中用来度量图像的齐次坐标,可以去掉;所以单应矩阵是pose和平面参数的矩阵;
利用单应矩阵得到相机的外参?

相关文章推荐
- 【笔记】已知相机外参数,求解左右相机之间相对运动
- [置顶] SLAM基础技术点之基于计算机视觉求解相机姿态变化的方法汇总
- PnP 单目相机位姿估计(二):solvePnP利用二维码求解相机世界坐标
- Oracle 利用order by + case when 实现排序,置顶
- 第12周项目4利用遍历思想求解图问题1
- 第十二周 项目4-利用遍历思想求解图问题(5)
- 第十一周项目四 利用遍历思路求解图问题
- osg 学习 2 UpdateCallback, EventHandler, 运动的相机
- [置顶] 利用冒泡排序法,对任意数组进行排序;
- 【翻译】利用加速度求解位置的算法——三轴传感器
- 【第12周 项目4 - 利用遍历思想求解图问题(1-5)】
- 【数据结构】利用栈 求解表达式
- [置顶] Android通过访问相机或相册来更换头像
- 第十二周 利用遍历思想求解图问题(判断是否有简单路径)
- 利用四元数求解旋转矩阵
- android:用Camera拍照,解决某些手机利用自带相机崩溃的问题
- [置顶] 迷宫求解(栈实现)
- 利用requestAnimationFrame和Tween算法实现兼容所有浏览器的运动动画,直接秒杀Css3动画
- 第十二周项目4-利用遍历思想求解图问题(7)
- 利用matlab的PDE工具箱求解Neumann边界的Poisson方程