摄像机标定学习笔记(1)
2017-05-09 19:13
225 查看
在计算机视觉和图像处理等领域,为了利用摄像机所拍摄到的图像来还原空间中的物体,进一步应用于后续的工业测量,视觉监控,机器人手眼等诸多领域,摄像机标定作为基础性的工作,在精度和便捷性方面都有很高的研究价值。
摄像机标定主要分为三种:传统的摄像机标定方法,基于主动视觉摄像机标定方法和摄像机自标定。
其中传统标定是通过空间点和图像点之间的对应关系,计算出摄像机模型的内参数和外参数,分为直接线性变换法(direct linear transformation),Tsai两步法,Wenger迭代法,张正友的双平面法等。(内参数:摄像机的内部几何与光学参数;外参数:摄像机坐标系相对于某一世界坐标系的三维位置和方向关系)
基于主动视觉的方法是已知摄像机或景物的某些运动信息,运动信息包括摄像机或物体的平移量、旋转角度等,求解摄像机内参数。
自标定不需要使用标定块,依靠多幅图像对应关系,直接计算内外参数。
一、摄像机标定中几种坐标系的关系
1、世界坐标系与摄像机坐标系的变换关系



齐次坐标表示:

其中: R 为正交矩阵, T 为平移矩阵,其中 R 有3个自由度,根据R 的正交性,可得6个正交约束,该矩阵一共9个参数,所以自由度是3,再加上 T 的三个变量,一共6个参数,称为摄像机的外部参数。
世界坐标系

先经过旋转 R 后经过平移 T ,可以得到摄像机坐标系

。
通常将摄像机光心设定为坐标原点,也就是摄像机坐标系原点

指向世界坐标系

。
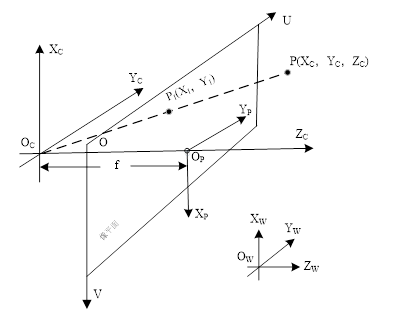
2、图像坐标系与摄像机坐标系的变换关系
对于空间中的一点 P,在摄像机坐标系中位于

,在图像坐标系中对应点

,两者构成一种透视关系,利用相似关系可得:


所以:


用矩阵表示:

将其化成齐次坐标表示:

摄像机标定主要分为三种:传统的摄像机标定方法,基于主动视觉摄像机标定方法和摄像机自标定。
其中传统标定是通过空间点和图像点之间的对应关系,计算出摄像机模型的内参数和外参数,分为直接线性变换法(direct linear transformation),Tsai两步法,Wenger迭代法,张正友的双平面法等。(内参数:摄像机的内部几何与光学参数;外参数:摄像机坐标系相对于某一世界坐标系的三维位置和方向关系)
基于主动视觉的方法是已知摄像机或景物的某些运动信息,运动信息包括摄像机或物体的平移量、旋转角度等,求解摄像机内参数。
自标定不需要使用标定块,依靠多幅图像对应关系,直接计算内外参数。
一、摄像机标定中几种坐标系的关系
1、世界坐标系与摄像机坐标系的变换关系
齐次坐标表示:
其中: R 为正交矩阵, T 为平移矩阵,其中 R 有3个自由度,根据R 的正交性,可得6个正交约束,该矩阵一共9个参数,所以自由度是3,再加上 T 的三个变量,一共6个参数,称为摄像机的外部参数。
世界坐标系
先经过旋转 R 后经过平移 T ,可以得到摄像机坐标系
。
通常将摄像机光心设定为坐标原点,也就是摄像机坐标系原点
指向世界坐标系
。
2、图像坐标系与摄像机坐标系的变换关系
对于空间中的一点 P,在摄像机坐标系中位于
,在图像坐标系中对应点
,两者构成一种透视关系,利用相似关系可得:
所以:
用矩阵表示:
将其化成齐次坐标表示:

相关文章推荐
- 机器视觉学习笔记(7)——基于OpenCV的双目摄像机标定
- 摄像机标定学习笔记(3)
- 机器视觉学习笔记(4)——单目摄像机标定参数说明
- OpenCV学习笔记(十五)——摄像机的标定和3D重建calib3D
- 摄像机标定学习笔记(4)
- 摄像机标定学习笔记(9) 关于单应性
- 摄像机标定学习笔记(6) 关于张正友平面标定方法
- 机器视觉学习笔记(4)——单目摄像机标定参数说明
- 机器视觉学习笔记(6)——双目摄像机标定参数说明
- 摄像机标定学习笔记(13)摄像机标定参数描述
- 摄像机标定学习笔记(8) 非线性模型
- 摄像机标定学习笔记(14)矫正与校正的区别
- (学习笔记)摄像机模型与标定——标定函数
- 摄像机标定学习笔记(10)关于畸变矫正
- 机器视觉学习笔记(4)——单目摄像机标定参数说明
- OpenCV学习笔记(0)—— 摄像机模型与标定1
- (学习笔记)摄像机模型与标定——三个坐标系及其之间关系
- 摄像机标定学习笔记(2)
- 摄像机标定学习笔记(5) 关于张正友平面标定方法
- 机器视觉学习笔记(5)——基于OpenCV的单目摄像机标定