摄像机标定学习笔记(5) 关于张正友平面标定方法
2017-07-30 22:27
260 查看
张正友教授于1998年提出了单平面棋盘格的摄像机标定方法,是一种用来标定摄像机的一种灵活的新技术,这种方法只需要相机的很少位置(至少两个)观测平面,并且相机和平面都可以以未知的速度自由移动,这种方法灵活易用,推动了计算机视觉从实验室走向现实世界的关键一步。
1、算法描述
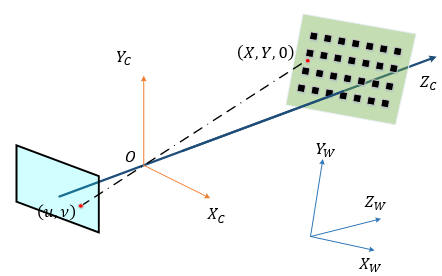
此标定方法简单实用,首先只需要打印一张模板并贴在一个平面上,用摄像机从不同的角度拍摄若干模板的图像,然后检测图像中的特征点,求出摄像机的内外参数,最后求出畸变系数,优化求精。
1、算法描述
此标定方法简单实用,首先只需要打印一张模板并贴在一个平面上,用摄像机从不同的角度拍摄若干模板的图像,然后检测图像中的特征点,求出摄像机的内外参数,最后求出畸变系数,优化求精。

相关文章推荐
- 摄像机标定学习笔记(6) 关于张正友平面标定方法
- 摄像机标定学习笔记(12)关于相机标定的问题答复网友(转载)
- 摄像机标定学习笔记(10)关于畸变矫正
- 摄像机标定学习笔记(9) 关于单应性
- 机器视觉学习笔记(4)——单目摄像机标定参数说明
- 学习笔记:关于科学方法在社会科学中的局限性
- haXe学习笔记:关于NME中的drawTiles方法
- OpenCV学习笔记(0)—— 摄像机模型与标定1
- 【DM642学习笔记一】关于Can't Initialize Target CPU的一种解决方法(Error 0x80000240/-10
- 2.关于结构体以及结构体数组作为函数入口参数的方法(学习笔记)
- java学习笔记(二)关于main方法
- 我的java学习笔记(11)关于装箱、参数可变方法和枚举类型
- 【Linux学习笔记】关于ubuntu开机菜单栏和任务栏不见了的有效解决方法
- C#学习笔记: 关于get和set方法
- 机器视觉学习笔记(6)——双目摄像机标定参数说明
- 【前端学习笔记】2015-09-08~~~~ 关于切图的简单方法
- opencv实现摄像机标定(张正友的标定方法)
- OpenCV学习笔记(十五)——摄像机的标定和3D重建calib3D
- 张正友平面标定方法 超详细
- Spring学习笔记 关于Bean的初始化和清理-init和destroy方法