基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(十一)使用domoticz+mosquitto+Android客户端实现控制STM32板上的LED(二)
2017-04-28 03:50
731 查看
本文在前一篇实现了STM32平台利用MQTT协议对接domoticz平台控制LED灯的基础上,完善了网络连接和MQTT的broker连接过程,实现了断网重连功能。
实现部分主要在rt-thread\components\external\paho-mqtt\MQTTClient-C\samples\domoticz\DomoticzThread.c中。
在前一篇的源码基础上稍作改动,如下所示:
DomoticzThread.c:
运行效果:
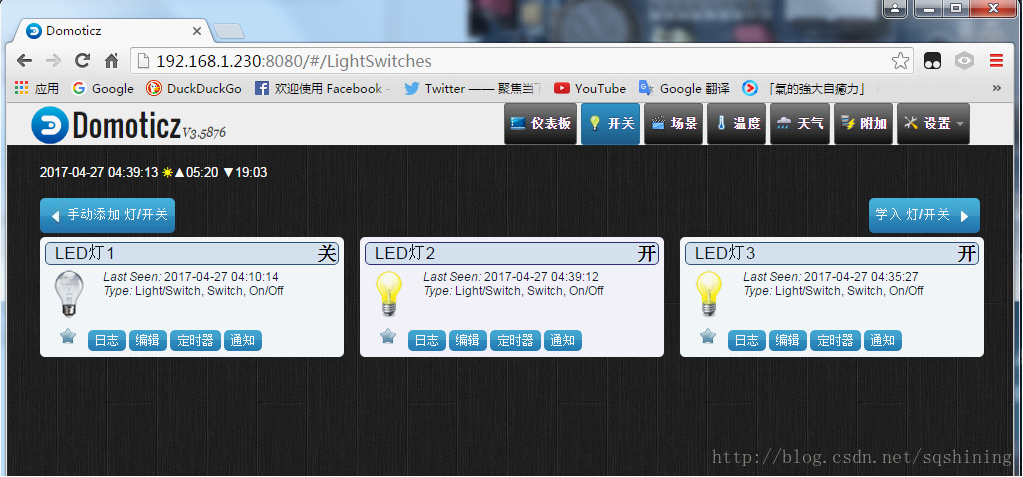
domoticz这边建立三个LED灯,idx分别为1,2,3
STM32开发板上的LED0的idx为2,LED1的idx为3。
也就是domoticz平台上的“LED灯2”对应开发板LED0;
domoticz平台上的“LED灯3”对应开发板LED1。


好了,现在在STM32开发板上看效果:
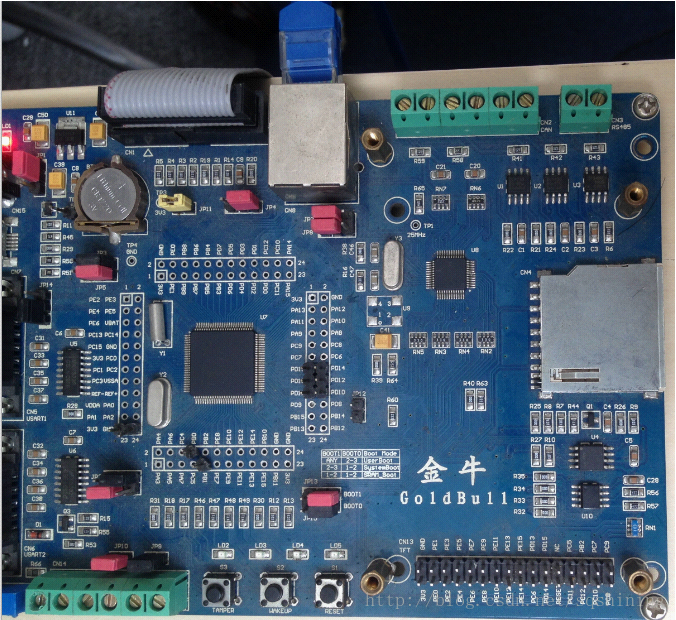
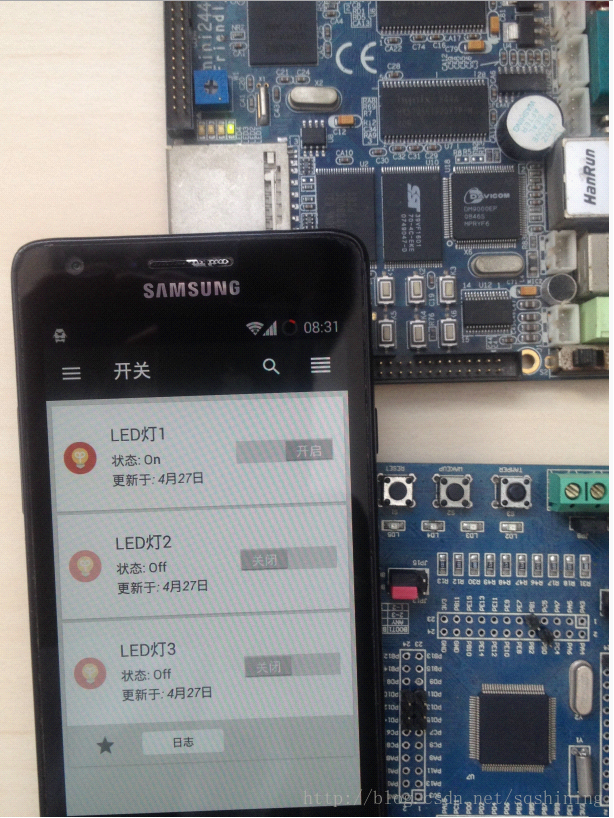
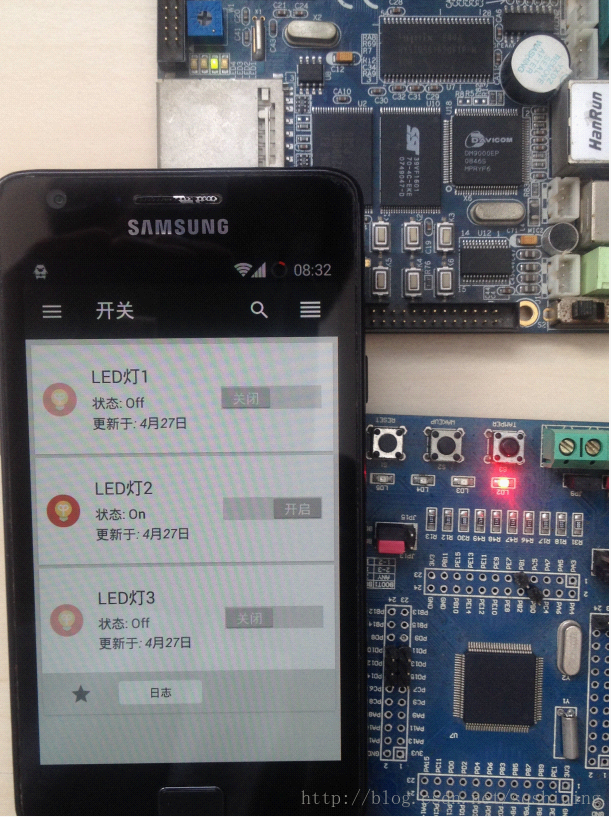
1、LED0亮:

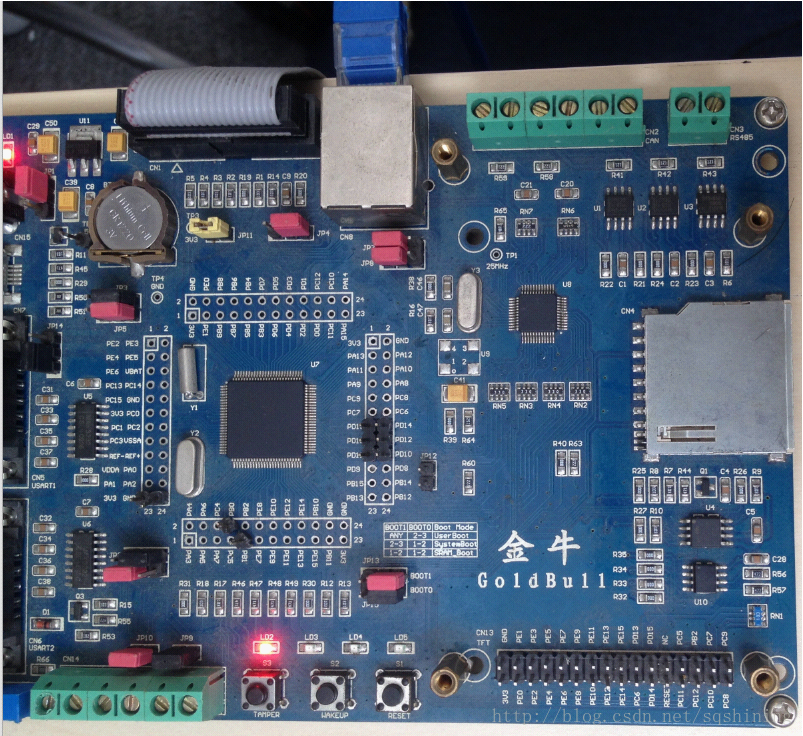
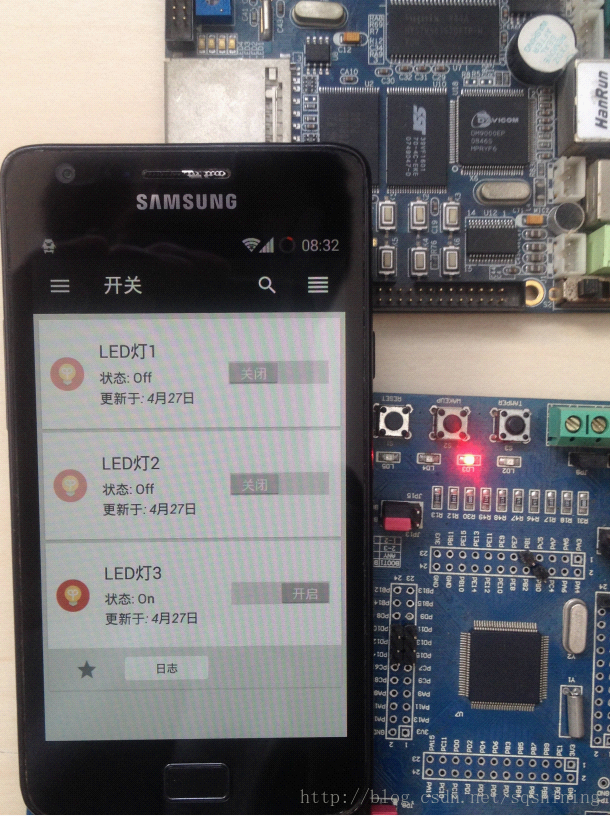
2、LED1亮:

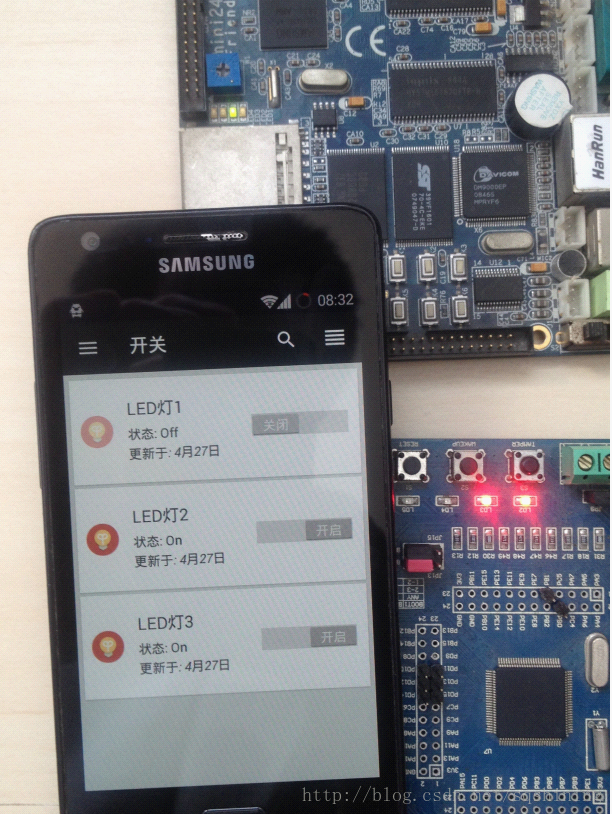
3、LED0、LED1都亮:
4、在mini2440板上运行前面做的mqtt客户端程序。
mini2440上也控制两个灯LED0,对应的idx为1;LED1,对应idx为2。
也就是说mini2440板上的LED1和STM32板上的LED0的idx是相同的,看看能不能同时点亮。
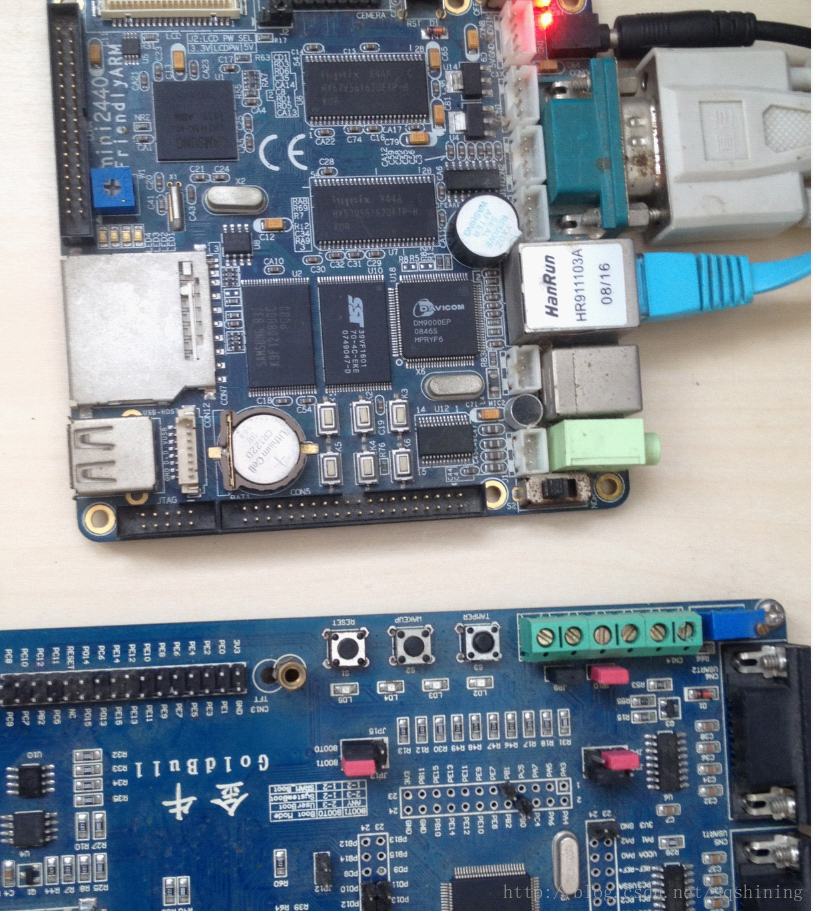
点亮mini2440的LED0:

下面将看到在domoticz上点亮LED2灯可以同时点亮mini2440上的LED1和STM32上的LED0:

都点亮:

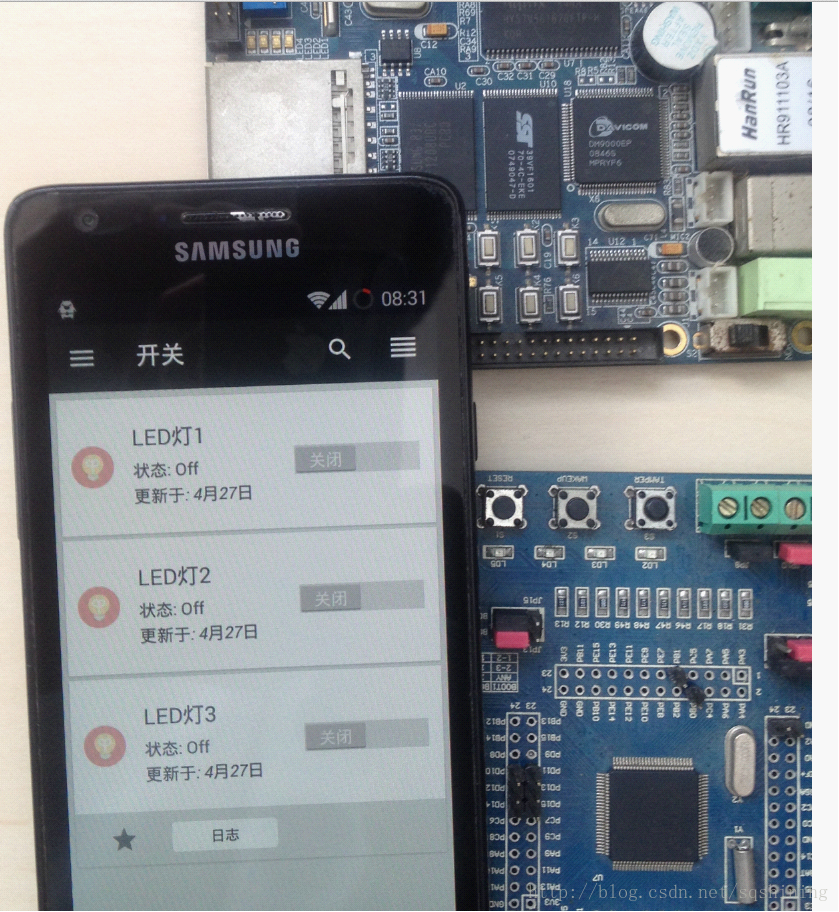
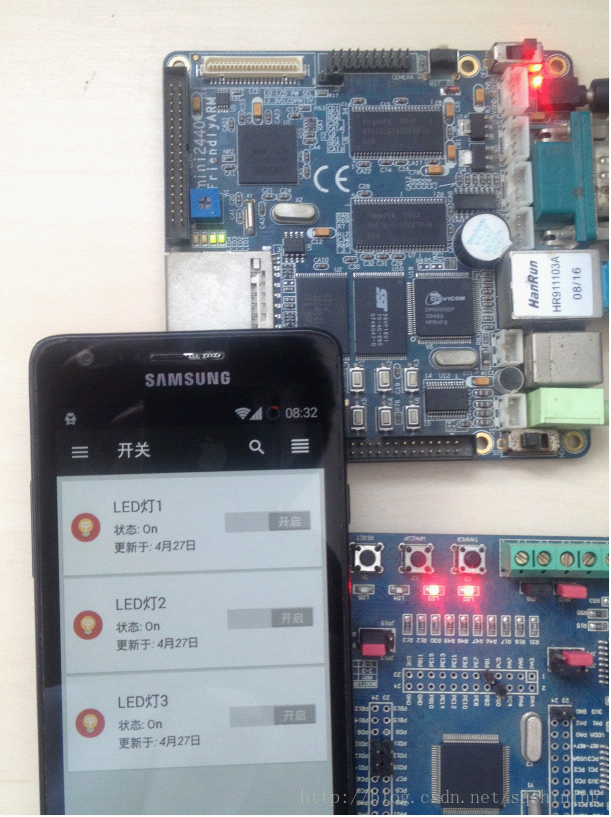
5、Android手机实际控制效果:


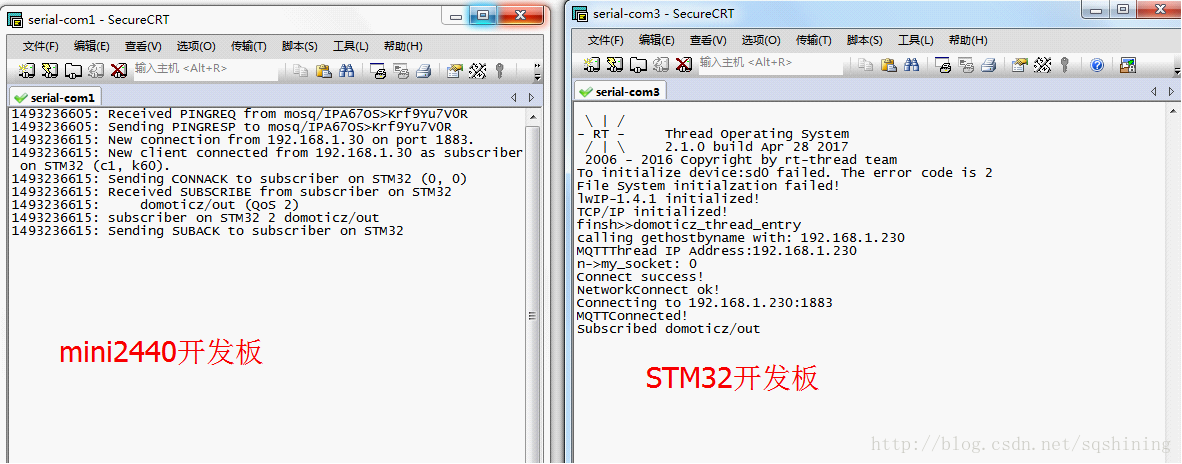
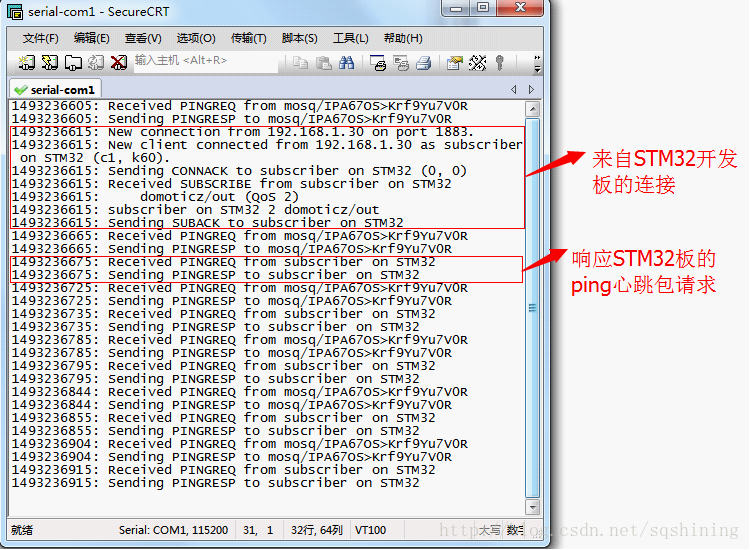
6、当MQTT的broker被关闭并重新打开后,STM32板的反应:
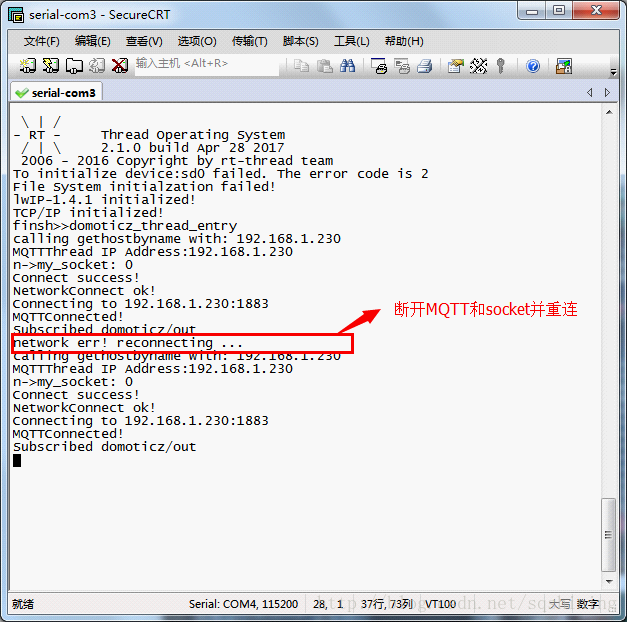
在程序中,其实只要ping 10次没有结果,就会断开MQTT连接和socket连接,并重新连接。
如果有网络错误,连接不上会,延时一段时间,然后重新连接socket,然后连MQTT的broker,然后订阅。
具体如上述源码中处理那样。
附:STM32开发板的整个源码工程下载地址:
http://download.csdn.net/download/sqshining/9828049
实现部分主要在rt-thread\components\external\paho-mqtt\MQTTClient-C\samples\domoticz\DomoticzThread.c中。
在前一篇的源码基础上稍作改动,如下所示:
DomoticzThread.c:
#include <rtthread.h>
#include "MQTTClient.h"
//#include "led.h"
#include "DomoticzMessageParser.h"
//#define __DEBUG
#ifdef __DEBUG
#include <stdarg.h>
#include <string.h>
static const char *getCurrentFileName()
{
const char *p = strrchr(__FILE__,'\\');
return ++p;
}
#define dprintf(fmt,...) rt_kprintf("%s,line:%d,"fmt,getCurrentFileName(),__LINE__,##__VA_ARGS__)
#else
#define dprintf(fmt,...)
#endif
struct opts_struct
{
char* clientid;
int nodelimiter;
char* delimiter;
enum QoS qos;
char* username;
char* password;
char* host;
int port;
int showtopics;
} opts =
{
(char*)"subscriber on STM32", 0, (char*)"\n", QOS2, NULL, NULL, (char*)"192.168.1.230", 1883, 0
};
int is_over;
void quit_domoticz_thread(void)
{
is_over = 1;
}
//================== Added 2017-Apr-27 8:06:53 start ==================
//处理连接的状态机结构
typedef struct
{
enum{
UNCONNECTED = 0,
NETWORK_CONNECTED=1,
MQTT_CONNECTED=2,
SUBSCRIBING_SUCCESS=3,
WAIT_TIME_OUT=4,
//SUBSCRIBING_FAILURE = 4
}state;
int timeout_s;//超时时间,单位为秒
int times_count;//累计连续尝试连接次数,在连接成功后清零
}Connection_t;
void connect_time_out(void * data)
{
Connection_t* con =(Connection_t*)data;
if(con && con->timeout_s>0)
{
con->timeout_s --;
}
}
#define NETWORK_CONNECT_TIMEOUT 5 //5s
#define MAX_NETWORK_CONNECT_TIMES 5
#define MQTT_CONNECT_TIMEOUT 1 //1s
#define MAX_MQTT_CONNECT_TIMES 5
#define SUBSCRIB_TIMEOUT 1 //1s
#define MAX_SUBSCRIB_TIMES 5
#define MAX_NO_PING_RESPONS_TIMES 10
Connection_t connection={UNCONNECTED,NETWORK_CONNECT_TIMEOUT,0};
//================== Added 2017-Apr-27 8:06:53 end ===================
void messageArrived(MessageData* md)
{
MQTTMessage* message = md->message;
#if 0 /* Commented @ 2017-Apr-23 1:18:29 */
if (opts.showtopics)
rt_kprintf("%.*s\t", md->topicName->lenstring.len, md->topicName->lenstring.data);
if (opts.nodelimiter)
rt_kprintf("%.*s", (int)message->payloadlen, (char*)message->payload);
else
rt_kprintf("%.*s%s", (int)message->payloadlen, (char*)message->payload, opts.delimiter);
#endif /* Commented */
dprintf("payloadlen=%d,%s\n",(int)message->payloadlen,(char*)message->payload);
dprintf("strlen(payload)=%d\n",strlen((char*)message->payload));
//fflush(stdout);
ParseDomoticzMessage((char*)message->payload);
//dprintf("MSG: qos %d, retained %d, dup %d, packetid %d\n", message->qos, message->retained, message->dup, message->id);
}
void set_host(char *host)
{
opts.host = host;
}
void domoticz_thread_entry(void* parameter)
{
int rc = 0;
unsigned char buf[512]={0};//buf[100];
unsigned char readbuf[512]={0};//readbuf[100];
char* topic = "domoticz/out";
Network n;
MQTTClient c;
MQTTPacket_connectData data = MQTTPacket_connectData_initializer;
rt_timer_t timer = rt_timer_create("connect_timer", connect_time_out, &connection, RT_TICK_PER_SECOND, RT_TIMER_FLAG_PERIODIC);
is_over = 0;
rt_kprintf("domoticz_thread_entry\n");
//================== Added 2017-Apr-26 2:36:53 start ==================
RegisterHardware(Create_LED0(),2);
RegisterHardware(Create_LED1(),3);
OpenHardwares();
SetupDomoitczMessageParser();
SetEnableParseItem(KEY_IDX);
SetEnableParseItem(KEY_NVALUE);
SetEnableParseItem(KEY_SWITCH_TYPE);
initHardwareSettings();
//================== Added 2017-Apr-26 2:36:53 end ===================
NetworkInit(&n);
//dprintf("readbuf=%p,readbuf size=%u\n",readbuf,sizeof(readbuf));
data.willFlag = 0;
data.MQTTVersion = 3;
data.clientID.cstring = opts.clientid;
data.username.cstring = opts.username;
data.password.cstring = opts.password;
data.keepAliveInterval = 60;
data.cleansession = 1;
rt_timer_start(timer);
while(!is_over)
{
switch(connection.state)
{
case UNCONNECTED:
if(connection.timeout_s>0)
continue;
rc = NetworkConnect(&n, opts.host, opts.port);
if(rc==0)
{
connection.state = NETWORK_CONNECTED;
connection.times_count = 0;
rt_kprintf("NetworkConnect ok!\n");
rt_kprintf("Connecting to %s:%d\n", opts.host, opts.port);
MQTTClientInit(&c, &n, 1000, buf, sizeof(buf), readbuf, sizeof(readbuf));
}
else if(connection.times_count <MAX_NETWORK_CONNECT_TIMES)
{
connection.times_count++;
connection.timeout_s = NETWORK_CONNECT_TIMEOUT;
}
else
{//reset system cpu,restart
connection.times_count=0;
rt_thread_delay(RT_TICK_PER_SECOND*600);//10分钟后再连
//goto exit;
}
break;
case NETWORK_CONNECTED:
if(connection.timeout_s>0)
continue;
dprintf("\n");
rc = MQTTConnect(&c, &data);
dprintf("\n");
if(rc == SUCCESS)
{
connection.state = MQTT_CONNECTED;
connection.times_count = 0;
rt_kprintf("MQTTConnected!\n");
dprintf("Subscribing to %s\n", topic);
}
else if(connection.times_count <MAX_MQTT_CONNECT_TIMES)
{
rt_kprintf("MQTTConnect times=%d, err:%d! \n",connection.times_count,rc);
connection.times_count++;
connection.timeout_s = MQTT_CONNECT_TIMEOUT;
}
else
{//重新进行network连接
dprintf("\n");
NetworkDisconnect(&n);
connection.state = UNCONNECTED;
connection.times_count=0;
rt_thread_delay(RT_TICK_PER_SECOND*600);//10分钟后再连
}
break;
case MQTT_CONNECTED:
if(connection.timeout_s>0)
continue;
rc = MQTTSubscribe(&c, topic, opts.qos, messageArrived);
if(rc == SUCCESS)
{
rt_kprintf("Subscribed %s\n", topic);
connection.state = SUBSCRIBING_SUCCESS;
connection.times_count = 0;
}
else if(connection.times_count <MAX_SUBSCRIB_TIMES)
{
rt_kprintf("MQTTSubscribe times=%d, err:%d! \n",connection.times_count,rc);
connection.times_count++;
connection.timeout_s = MQTT_CONNECT_TIMEOUT;
}
else
{
//1分钟后重新进行network连接
rt_kprintf("MQTTSubscribe err! reconnect after 1 min\n");
MQTTDisconnect(&c);
NetworkDisconnect(&n);
connection.state = UNCONNECTED;
connection.times_count=0;
rt_thread_delay(RT_TICK_PER_SECOND*60);//1分钟后再连
}
break;
case SUBSCRIBING_SUCCESS:
MQTTYield(&c, 1000);
if(c.ping_outstanding==1)
{
connection.times_count++;
if(connection.times_count>MAX_NO_PING_RESPONS_TIMES)
{
rt_kprintf("network err! reconnecting ...\n");
MQTTDisconnect(&c);
NetworkDisconnect(&n);
connection.state = UNCONNECTED;
connection.times_count = 0;
//rt_thread_delay(RT_TICK_PER_SECOND*60);//1分钟后重连
}
}
else
{
connection.times_count = 0;
}
break;
default:
break;
}
}
exit:
rt_kprintf("Stopping\n");
MQTTDisconnect(&c);
NetworkDisconnect(&n);
rt_timer_delete(timer);
}
void domoticz_thread_init(void)
{
rt_thread_t domoticz_thread;
domoticz_thread = rt_thread_create("DomoticzThread", domoticz_thread_entry, RT_NULL,
0xf00, 28, 10);
if (domoticz_thread != RT_NULL)
rt_thread_startup(domoticz_thread);
}
#ifdef RT_USING_FINSH
#include <finsh.h>
FINSH_FUNCTION_EXPORT(set_host, set domoticz host ip addr);
FINSH_FUNCTION_EXPORT(domoticz_thread_init,to run domoticz thread );
FINSH_FUNCTION_EXPORT(quit_domoticz_thread,quit domoticz thread );
#endif运行效果:
domoticz这边建立三个LED灯,idx分别为1,2,3
STM32开发板上的LED0的idx为2,LED1的idx为3。
也就是domoticz平台上的“LED灯2”对应开发板LED0;
domoticz平台上的“LED灯3”对应开发板LED1。
好了,现在在STM32开发板上看效果:
1、LED0亮:
2、LED1亮:
3、LED0、LED1都亮:
4、在mini2440板上运行前面做的mqtt客户端程序。
mini2440上也控制两个灯LED0,对应的idx为1;LED1,对应idx为2。
也就是说mini2440板上的LED1和STM32板上的LED0的idx是相同的,看看能不能同时点亮。
点亮mini2440的LED0:
下面将看到在domoticz上点亮LED2灯可以同时点亮mini2440上的LED1和STM32上的LED0:
都点亮:
5、Android手机实际控制效果:
6、当MQTT的broker被关闭并重新打开后,STM32板的反应:
在程序中,其实只要ping 10次没有结果,就会断开MQTT连接和socket连接,并重新连接。
如果有网络错误,连接不上会,延时一段时间,然后重新连接socket,然后连MQTT的broker,然后订阅。
具体如上述源码中处理那样。
附:STM32开发板的整个源码工程下载地址:
http://download.csdn.net/download/sqshining/9828049

相关文章推荐
- 基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(九)使用domoticz+mosquitto+Android客户端实现控制mini2440上的LED(二)
- 基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(八)使用domoticz+mosquitto+Android客户端实现控制mini2440上的LED(一)
- 基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(六)使用domoticz联合arm上的mosquitto实现Android客户端远程控制
- 基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(四)交叉编译OpenSSL、c-ares、e2fsprogs和mosquitto
- 《基于Android微博整合客户端的设计与实现》毕业设计中期考核表
- 基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(五)交叉编译并安装zlib、curl、boost和domoticz
- 基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(一)前言
- 基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(七)交叉编译paho.mqtt.embedded-c库和嵌入式linux样例程序
- 《基于Android微博整合客户端的设计与实现》毕业设计论文任务书
- 基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(三)编译并安装cmake和git工具
- 《基于Android微博整合客户端的设计与实现》毕业设计论文开题报告
- 基于Android的小巫新闻客户端开发---显示新闻详细内容业务逻辑实现
- 基于XMPP实现的Openfire的配置安装+Android客户端的实现
- Android基于XMPP Smack Openfire开发IM【四】初步实现两个客户端通信
- 基于Android的小巫新闻客户端开发---显示新闻详细内容业务逻辑实现
- android 使用shell command实现对设备控制,实现按坐标点击
- 基于XMPP实现的Openfire的配置安装+Android客户端的实现
- 使用input输入子系统实现对tiny6410LED灯的控制
- MVC学习十一:浅谈在ASP.NET MVC3中使用IClientValidatable接口实现客户端和服务器端同时验证
- 基于ichartjs图形库在android上使用HTML动态实现多数据源的面积图