基于mavlink的pixhawk与Ubuntu Board通信的设计与实现
2017-02-20 21:56
148 查看
摘要
本系统的设计思路是通过USB线采用mavlink协议实现pixhawk(Firmware)与装有Ubuntu系统的机载计算机进行通信。
步骤
STEP1:
编译Firmware固件并烧写(注意不要采用ardupilot内核,否则使用NSH无法启动mavlink),具体参考我以前的blog:
pixhawk(Firmware)Ubuntu下的编译及烧录(http://blog.csdn.net/jon_wei/article/details/53140599)
win7下 pixhawk (ardupilot) 的编译(http://blog.csdn.net/jon_wei/article/details/53140019)
STEP2:
通过NSH实现对pixhawk内核的操作,具体参考我的blog:
pixhawk 基于UART5 的NSH环境搭建(http://blog.csdn.net/jon_wei/article/details/55657508)
本文烧录的是Firmware固件,所以打开后:
STEP3:
通过NSH启动pixhawk对应USB口(/dev/ttyACM0);
STEP4:
在Ubunt中编译c_uart_interface_example,具体参考网站(README):
https://github.com/jonweili/c_uart_interface_example
(
)
STEP5:
将pixhawk与Ubuntu Board用USB线连接,然后在Ubuntu终端中输入:

至此就实现了通信。。。。。
声明:
本文参考@LorenzMeier LorenzMeier Minor的GitHub项目,
https://github.com/mavlink/c_uart_interface_example
本系统的设计思路是通过USB线采用mavlink协议实现pixhawk(Firmware)与装有Ubuntu系统的机载计算机进行通信。
步骤
STEP1:
编译Firmware固件并烧写(注意不要采用ardupilot内核,否则使用NSH无法启动mavlink),具体参考我以前的blog:
pixhawk(Firmware)Ubuntu下的编译及烧录(http://blog.csdn.net/jon_wei/article/details/53140599)
win7下 pixhawk (ardupilot) 的编译(http://blog.csdn.net/jon_wei/article/details/53140019)
STEP2:
通过NSH实现对pixhawk内核的操作,具体参考我的blog:
pixhawk 基于UART5 的NSH环境搭建(http://blog.csdn.net/jon_wei/article/details/55657508)
本文烧录的是Firmware固件,所以打开后:
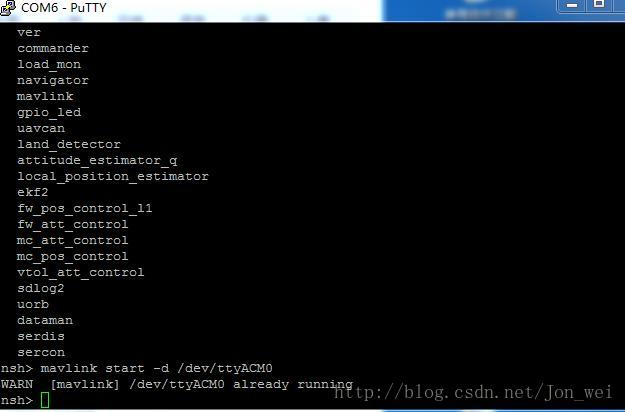
STEP3:
通过NSH启动pixhawk对应USB口(/dev/ttyACM0);
STEP4:
在Ubunt中编译c_uart_interface_example,具体参考网站(README):
https://github.com/jonweili/c_uart_interface_example
(
$ cd c_uart_interface_example/ $ make
)
STEP5:
将pixhawk与Ubuntu Board用USB线连接,然后在Ubuntu终端中输入:
./mavlink_control -d /dev/ttyACM0
至此就实现了通信。。。。。
声明:
本文参考@LorenzMeier LorenzMeier Minor的GitHub项目,
https://github.com/mavlink/c_uart_interface_example

相关文章推荐
- 基于TCP/IP协议的电力通信综合监控管理系统设计与实现
- 基于SNMP的通信网络性能管理模块设计与实现
- 基于OMAP1510双核架构的移动多媒体通信终端的设计与实现
- 我的毕业设计论文:基于局域网的通信工具的设计与实现(一)
- 我的毕业设计论文:基于局域网的通信工具的设计与实现(三)
- 基于dragonboard 410c的智能魔镜设计(2)——数据库设计与实现
- 基于RTP的多媒体通信的监控/发布的设计与实现
- 基于RTP的多媒体通信的监控/发布的设计与实现
- CSDN开源夏令营 基于Compiz的switcher插件设计与实现之前期准备 ubuntu环境的搭建
- 我的毕业设计论文:基于局域网的通信工具的设计与实现(二)
- 基于 Netty 的可插拔业务通信协议的实现「1」协议描述及基本消息对象设计
- 基于dragonboard 410c的智能魔镜设计(8)——UI的python脚本实现
- 基于Socket的游戏服务器通信框架的设计与实现
- 基于Web的工作流管理系统的设计与实现
- 基于win平台的高性能服务器底层通信模型设计(1)
- Internet 即时通信系统的设计与实现
- 写书计划启动!《.NET通信框架的设计、实现与应用》
- 基于AM186ed微处理器的嵌入式系统以太网接口设计与实现
- 基于JavaScript与DBGRID控件的B/S结构客户端联想式录入技术的设计与实现
- 基于逻辑运算的简单权限系统(原理,设计,实现) VBS 版