《李航:统计学习方法》--- 感知机算法原理与实现
2016-11-23 13:04
260 查看
感知机模型
感知机是一个二类分类的线性分类模型。所谓二类分类就是它只能将实例分为正类和负类两个类别。那么为什么是线性分类模型呢,我的理解是感知机学习旨在求出可以将数据进行划分的分离超平面,而分离超平面的方程 w⋅x+b=0 为线性方程,所以感知机为线性分类模型。感知机模型如下图所示: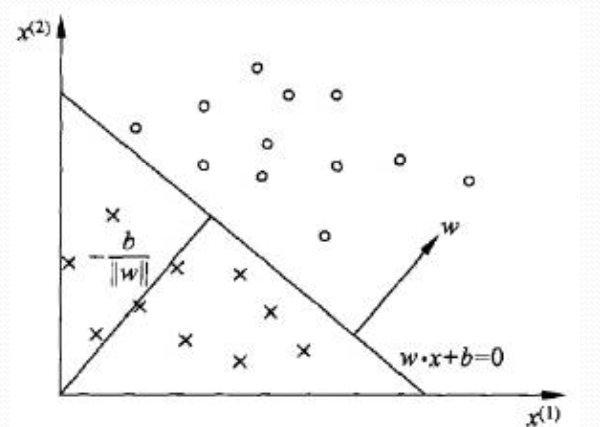
圈圈表示正类,而叉叉表示负类。圈圈与叉叉之间的直线即上文所说的分离超平面(注意分离超平面并不是唯一的!)它将所有的样本划分为两部分。位于分离超平面上方的为正类,记为+1,位于分离超平面下方的为负类,记为-1。也就是说,假设给一个样本的特征向量x,如果w⋅x+b>0, 那么样本为正类(+1),反之若w⋅x+b<0, 样本则属于负类(-1)。我们 引入符号函数sign(x),即sign(x)={+1,x≥0−1,x<0由此我们可以得到由输入空间到输出空间的函数f(x)=sign(w⋅x+b)这就叫做感知机。其中,w和b为感知机参数,w∈Rn叫做权值或权值向量,b∈R叫做偏置,w⋅x表示w和x的内积。感知机学习的目的就在于确定参数w和b的值。
感知机学习策略
给定一个线性可分的数据集T={(x1,y1),(x2,y2),...(xN,yN)}其中xi∈X=Rn,yi∈Y={+1,−1},i=1,2,3,...N 。为了确定感知机模型的参数w和b,需要确定一个学习策略,即定义一个损失函数并将损失函数极小化。感知机采用的损失函数为误分类点到超平面的总距离。首先写出输入空间Rn中任一点x0到分离超平面的距离1∥w∥|w⋅x0+b| 这里∥w∥ 是w的L2范数。
其次对于误分类的数据(xi,yi)来说,−yi(w⋅xi+b)>0因为当w⋅xi+b>0,yi=−1,而当w⋅xi+b<0,yi=+1。因此误分类点xi到超平面的距离是−1∥w∥yi(w⋅xi+b)这样假设误分类点的集合为M,那么所有误分类点到超平面的总距离为−1∥w∥∑xi∈Myi(w⋅xi+b)不考虑1∥w∥,就得到感知机学习的损失函数L(w,b)=−∑xi∈Myi(w⋅xi+b)显然,损失函数L(w,b)是非负的。如果没有误分类点,损失函数值为0,而且,误分类点越少,误分类点离超平面越近,损失函数的值越小。
感知机学习的策略是在假设空间中选取使损失函数最小的模型参数w,b。
感知机学习算法
感知机学习算法是误分类驱动的,具体采用随机梯度下降法。首先,任意选取一个超平面w0,b0,然后用梯度下降法不断地极小化损失函数。极小化过程中不是一次使M中所有误分类点的梯度下降,而是一次随机选取一个误分类点使其梯度下降。损失函数L(w,b)的梯度为∇wL(w,b)=−∑xi∈Myixi ∇bL(w,b)=−∑xi∈Myi 随机选取一个误分类点(xi,yi),对w,b进行更新:w←w+ηyixi b←b+ηyi式中η(0<η≤1)是步长,在统计学习中又称为学习率。综上所述,得到如下算法(感知机学习算法的原始形式)
输入:训练集T={(x1,y1),(x2,y2),...(xN,yN)},其中xi∈X=Rn,yi∈Y={+1,−1},i=1,2,3,...N ;学习率η(0<η≤1);
输出:w,b;感知机模型f(x)=sign(w⋅x+b)
(1)选取初值w0,b0
(2)在训练集中选取数据(xi,yi)
(3)如果yi(w⋅xi+b)≤0 w←w+ηyixi b←b+ηyi(4)转至(2),直至训练集中没有误分类点。
例子:如图所示,正实例点是x1=(3,3)T,x2=(4,3)T,负实例点是x3=(1,1)T,使用感知机算法求解感知机模型f(x)=sign(w⋅x+b)

代码如下
#include "stdafx.h"
#include <iostream>
using namespace std;
const double lr = 1;
const int dim = 2;
const int n = 3;
double w[dim] = {0, 0};
double b = 0;
double samples
[dim] = {3,3, 4,3, 1,1};
int labels
= {1, 1, -1};
//计算两个向量的内积
double dot(double *w, double *feature)
{
double sum = 0;
for(int i = 0; i < dim; i++)
{
sum += (*w) * (*feature);
w++;
feature++;
}
return sum;
}
//感知机算法
void perceptron()
{
while(true)
{
int i;
for(i = 0; i < n; i++)
{
if(labels[i] * (dot(w, samples[i]) + b) <= 0)
{
cout << "w:(";
for(int j = 0; j < dim; j++)
{
w[j] = w[j] + lr*labels[i]*samples[i][j];
cout << w[j];
if( j != dim-1)
cout<<",";
}
b = b + lr*labels[i];
cout << ") b:"<<b << endl;
break;
}
}
if(i == n)
break;
}
}
int _tmain(int argc, _TCHAR* argv[])
{
perceptron();
system("pause");
return 0;
}运行结果如下

下面来介绍感知机算法的对偶形式
对偶形式的基本思想是,将w和b表示为实例xi和yi的线性组合的形式,通过求解其系数而求得w和b。我们假设初始值w0和b0均为0,在原始形式中,对误分类点(xi,yi)通过w←w+ηyixi b←b+ηyi逐步修改w和b。假设我们现在运行感知机算法的原始形式求得w和b,当算法结束,在样本点(xi,yi)处总共对w和b修改了ni次,则w和b关于(xi,yi)的增量分别是αiyixi和αiyi,这里αi=niη。这样最后学到的w和b可以分别表示为w=∑i=1Nαiyixib=∑i=1Nαiyi这里αi≥0,i=1,2,3,....N,当η=1时,αi表示第i个实例点由于误分而进行更新的次数。
综上所述,我们可以得到感知机学习算法的对偶形式
输入:训练集T={(x1,y1),(x2,y2),...(xN,yN)},其中xi∈X=Rn,yi∈Y={+1,−1},i=1,2,3,...N ;学习率η(0<η≤1);
输出:α,b;感知机模型f(x)=sign(∑Nj=1αjyjxj⋅x+b),其中α=(α1,α2,.....αN)。
(1)α←0,b←0
(2)在训练集中选取数据(xi,yi)
(3)如果yi(∑Nj=1αjyjxj⋅x+b)≤0 αi←αi+η b←b+ηyi(4)转至(2),直至训练集中没有误分类点。
我们依然使用上文给出的例子,利用感知机算法的对偶形式来求解,代码如下
#include "stdafx.h"
#include <iostream>
using namespace std;
// 学习率
const double lr = 1;
//特征维度
const int dim = 2;
//样本个数
const int n = 3;
//样本
double samples
[dim] = {3,3, 4,3, 1,1};
//样本标记
int labels
= {1, 1, -1};
//Gram矩阵
double g
;
double a
= {0};
double b = 0;
//计算两个向量的内积
double dot(double *w, double *feature)
{
double sum = 0;
for(int i = 0; i < dim; i++)
{
sum += (*w) * (*feature);
w++;
feature++;
}
return sum;
}
//求解Gram矩阵
void getGram()
{
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
{
g[i][j] = dot(samples[i],samples[j]);
}
}
}
double dot_antithesis(int subs)
{
double sum = 0;
for(int i = 0; i < n; i++)
{
sum += a[i]*labels[i]*g[i][subs];
}
return sum;
}
//感知机算法的对偶形式
void pereption_antithesis()
{
getGram();
while(true)
{
int i;
for(i = 0; i < n; i++)
{
if(labels[i] * (dot_antithesis(i) + b) <= 0)
{
a[i] += lr;
b = b + lr*labels[i];
cout << "a: ";
for(int j = 0; j < n; j++)
cout << a[j] << " ";
cout << "b: " << b << endl;
break;
}
}
if(i == n)
break;
}
}
int _tmain(int argc, _TCHAR* argv[])
{
pereption_antithesis();
system("pause");
return 0;
}程序运行结果如下


相关文章推荐
- 《李航:统计学习方法》--- 朴素贝叶斯算法原理与垃圾短信判别实现
- 感知机算法原理及代码实现
- 感知机算法原理(PLA原理)及 Python 实现
- 深度学习基础模型算法原理及编程实现--01.感知机
- Canny边缘检测算法原理及其VC实现详解(一)
- MUSICA(多尺度图像对比度增强)算法的简要原理及VC实现
- 数据结构——快速排序原理及算法Java实现
- 各种算法的C#实现系列1 - 合并排序的原理及代码分析
- 整数划分算法原理与实现
- 整数划分算法原理与实现
- MUSICA(多尺度图像对比度增强)算法的简要原理及VC实现
- 模式匹配 -- KMP 算法原理与实现
- 邮件服务器的原理,算法及实现(一) SMTP &amp;&amp; POP
- LZW for GIF 算法原理和实现
- Round-Robin负载均衡算法及其实现原理
- Round-Robin负载均衡算法及其实现原理
- Round-Robin负载均衡算法及其实现原理
- 邮件服务器的原理,算法及实现(二) MIME
- Linux集群之负载平衡原理和实现算法
- 整数划分算法原理与实现