Ubuntu 14.04 环境下在ROS安装测试Cartographer
2016-11-09 01:39
489 查看
Ubuntu 14.04 环境下在ROS安装测试Cartographer
实验说明
该安装和测试是基于hitcm博主的相关博客进行修改,根据自己的实验平台测试可以通过,建议大家可以看看hitcm的博客。实验步骤中的源码也属于hitcm所有,这里只是给出具体的步骤。
实验环境
Ubuntu 14.04请务必确保电脑可以联网
安装过程
安装依赖项:sudo apt-get install -y google-mock libboost-all-dev libeigen3-dev libgflags-dev libgoogle-glog-dev liblua5.2-dev libprotobuf-dev libsuitesparse-dev libwebp-dev ninja-build protobuf-compiler python-sphinx ros-indigo-tf2-eigen libatlas-base-dev libsuitesparse-dev liblapack-dev
首先安装ceres solver,这里直接使用hitcm的代码,先在home目录下新建文件夹,命名为catkin_ws,打开终端进入(cd)该文件的目录下,执行以下代码:
git clone https://github.com/hitcm/ceres-solver-1.11.0.git
执行之后,打开catkin_ws文件夹,可以看到名字为ceres-solver-1.11.0的文件夹,打开并新建文件夹build,在终端进入到该目录下(新建文件夹也可以在终端进行),执行以下指令:
cd ceres-solver-1.11.0/build
在该目录下依次执行以下指令:
cmake .. make sudo make install
接着安装cartographer,在catkin_ws下新建文件夹,我的命名为cat,随后在终端进入该目录下,执行以下指令:
git clone https://github.com/hitcm/cartographer.git
同样的,执行结束后可以看到一个cartographer的文件夹,在里面新建build文件夹,并在终端进入该路径下:
cd cartographer/build
进入后,依次执行以下指令:
cmake .. make sudo make install
安装cartographer——ros,进入catkin_ws的src目录下,执行以下指令:
git clone https://github.com/hitcm/cartographer_ros.git
在catkin_ws下执行指令:
catkin_make
数据下载测试,我的方法是用迅雷下载到本地再复制到Ubuntu:
https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
由于数据包有8G的和4G,这里选了较小的,只是用来测试。
下载完成并复制到Ubuntu后,在终端执行指令:
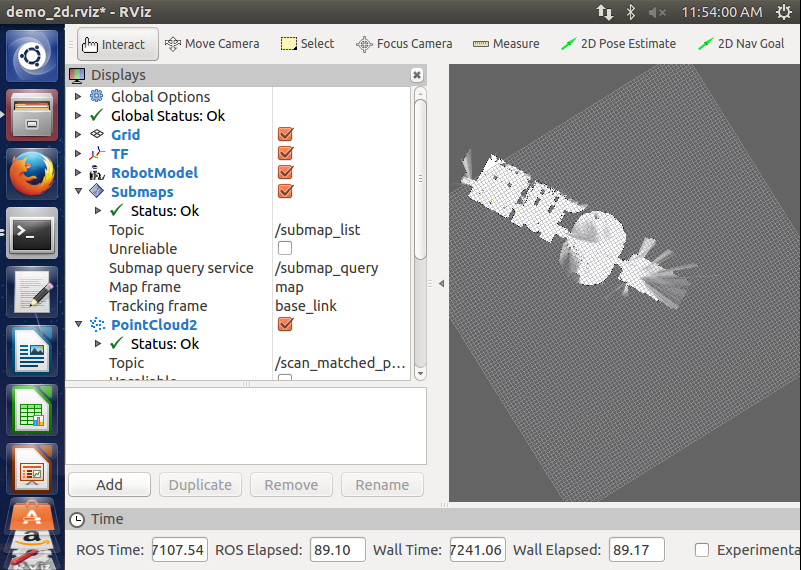
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag执行指令后如果没有错误提示,就可以看到下面的正确图示。
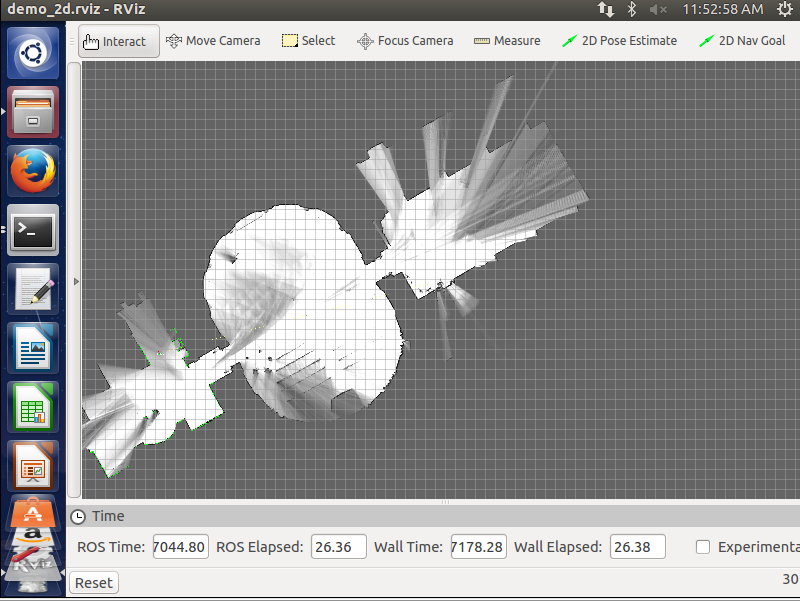
正确测试结果图示:
包含相关数据图:
大图:
至此,安装和测试就完成了。
错误总结
在进行安装cartographer时没有新建文件夹,直接放在了src下面,在进行测试的时候会报错,建议新建一个文件夹存放安装需要的一大堆文件。按照参考的博客一般都是可以完成配置的,也没遇到奇奇怪怪的问题,如果有,那就是在安装某一步时出错但被自己忽略掉了=。= ,这样的话,就需要重新来了(至少我是重新来了一遍)。
实验总结
配置实验也不是很难,一定要细心,特别是执行make,sudo make install指令的时候,看到有错误提示或者failed字样,就需要检查一下,要不到最后出来一堆错误就GG了。最后,希望每个配置该实验的小伙伴都能成功:)

相关文章推荐
- Ubuntu 14.04 环境下在ROS安装测试Cartographer
- Ubuntu 14.04 环境下在ROS安装测试Cartographer
- Ubuntu14.04环境下OpenCv的安装和OpenCv在terminal和QtCreator中的测试
- 基于Ubuntu14.04+ROS indigo环境LSD-SLAM的数据集测试成功
- ubuntu14.04 安装ros 开发环境
- 基于Ubuntu14.04+ROS indigo环境LSD-SLAM的数据集测试成功
- ORB_SLAM运行详细过程(ubuntu14.04系统和ROS Indigo环境搭建,配置及测试运行)
- 台式机安装Ubuntu14.04上网问题以及ROS的安装与环境配置
- cartographer_ros+Ubuntu14.04 安装
- Ubuntu14.04环境下ROS indigo 安装
- ubuntu14.04安装NS2仿真环境并测试节点
- thinkpad X240 安装Ubuntu14.04 系统并搭建android开发环境
- 我的RUBY之路--安装Ubuntu 14.04分区/ rbenv、ruby、rails开发环境搭建
- ubuntu server 14.04 LTS下搭建LAMP环境之最详细笔记之一U盘安装双系统
- Ubuntu14.04麒麟版安装:Netbeans,Java运行环境以及netbeans字体模糊问题
- ubuntu 14.04中JRE环境的安装
- ubuntu14.04 安装android开发环境
- Ubuntu 14.04 安装搭建Android开发编译环境
- Ubuntu 14.04 LTS下安装 LNMP环境