基于Ubuntu14.04+ROS indigo环境LSD-SLAM的数据集测试成功
2016-05-30 23:09
711 查看
基于Ubuntu14.04+ROS indigo环境LSD-SLAM的数据集测试成功
作者:雨水/家辉 日期:2016-05-30 CSDN博客:http://blog.csdn.net/gobitan
摘要:LSD-SLAM是一个实时的单目SLAM. 它能实时地在电脑上直接(不使用关键点和特征)创建大规模的半稠密地图,甚至可以运行在智能手机上,如Android/iOS.
第一步:搭建Ubuntu14.04.4+ROS indigo基础环境
[1] 在http://releases.ubuntu.com/14.04/官网下载ubuntu-14.04.4-desktop-i386.iso安装包,大约1G。然后在VMware Player里安装好,可以采用VMPlayer的Easy Install自动化安装整个过程不需要干预。
备注:因为ROS包含rviz可视化环境,因此需要选择桌面版。
[2] 将安装源换成阿里云的,如何换请参考http://mirrors.aliyun.com/help/ubuntu;
备注:强烈建议将安装源换成国内的,否则安装的时候要么速度慢,要么可能连不上。
[3] 在Ubuntu14.04.4中安装ROS indigo,参考:http://wiki.ros.org/indigo/Installation/Ubuntu
dennis@ubuntu:~$ sudo apt-get update
dennis@ubuntu:~$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
dennis@ubuntu:~$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 0xB01FA116
dennis@ubuntu:~$ sudo apt-get update
dennis@ubuntu:~$ sudo apt-get install ros-indigo-desktop-full
备注:这里采用的完整安装模式.
dennis@ubuntu:~$ sudo rosdep init
dennis@ubuntu:~$ rosdep update
dennis@ubuntu:~$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
dennis@ubuntu:~$ source ~/.bashrc
[4] 校验安装是否成功,输入roscore命令,如下:
dennis@ubuntu:~$ roscore
... logging to /home/dennis/.ros/log/9f2ace00-16b9-11e6-a10c-000c29b0df82/roslaunch-ubuntu-2078.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:44364/ ros_comm version 1.11.19
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.19
NODES
auto-starting new master
process[master]: started with pid [2090]
ROS_MASTER_URI=http://ubuntu:11311/
setting /run_id to 9f2ace00-16b9-11e6-a10c-000c29b0df82
process[rosout-1]: started with pid [2103]
started core service [/rosout]
[5] 安装ROS工具
dennis@ubuntu:~$ sudo apt-get install python-rosinstall
第二步:初始化ros编译环境及编译lsd_slam
dennis@ubuntu:~$ mkdir ~/rosbuild_ws
dennis@ubuntu:~$ cd ~/rosbuild_ws/
dennis@ubuntu:~/rosbuild_ws$ rosws init . /opt/ros/indigo
dennis@ubuntu:~/rosbuild_ws$ mkdir package_dir
dennis@ubuntu:~/rosbuild_ws$ rosws set ~/rosbuild_ws/package_dir -t .
dennis@ubuntu:~/rosbuild_ws$ echo "source ~/rosbuild_ws/setup.bash" >> ~/.bashrc
dennis@ubuntu:~/rosbuild_ws$ bash
dennis@ubuntu:~/rosbuild_ws$ cd package_dir/
dennis@ubuntu:~/rosbuild_ws/package_dir$
dennis@ubuntu:~/rosbuild_ws/package_dir$ sudo apt-get install ros-indigo-libg2o ros-indigo-cv-bridge liblapack-dev libblas-dev freeglut3-dev libqglviewer-dev libsuitesparse-dev libx11-dev
dennis@ubuntu:~/rosbuild_ws/package_dir$ git clone https://github.com/tum-vision/lsd_slam.git lsd_slam
dennis@ubuntu:~/rosbuild_ws/package_dir$ ls -lrt
total 4
drwxrwxr-x 5 dennis dennis 4096 May 8 03:30 lsd_slam
dennis@ubuntu:~/rosbuild_ws/package_dir$ rosmake lsd_slam
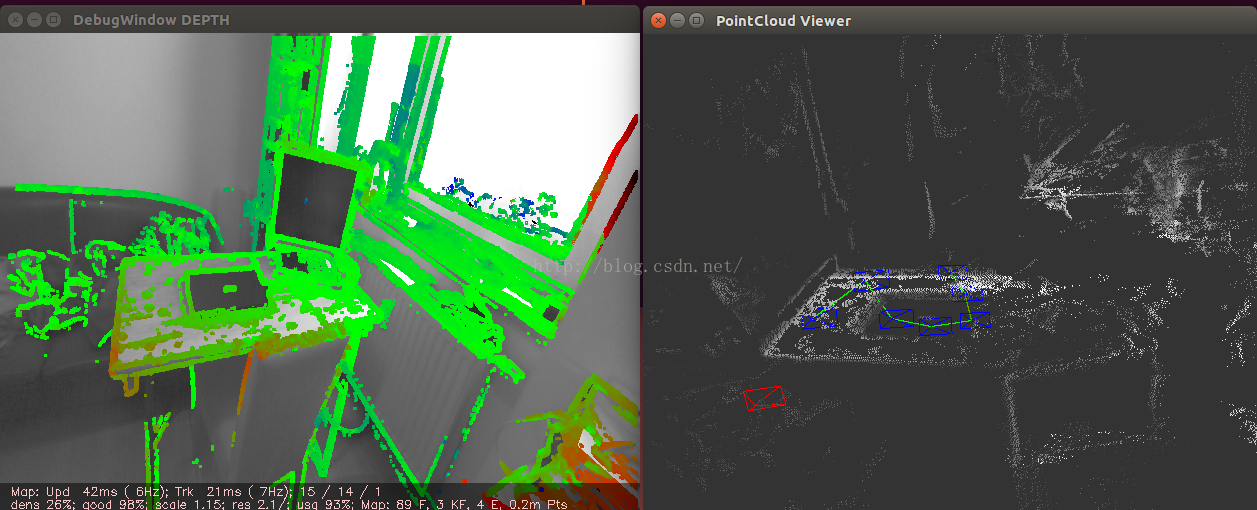
第三步:采用官方提供的数据集进行测试
备注:数据集下载请参考本文的参考资料[2].
测试方法一(采用image):
dennis@ubuntu:~$ roscore
dennis@ubuntu:~$ rosrun lsd_slam_viewer viewer
dennis@ubuntu:~$ rosrun lsd_slam_core dataset_slam _files:=/home/dennis/LSD_room/images _hz:=0 _calib:=/home/dennis/LSD_room/cameraCalibration.cfg
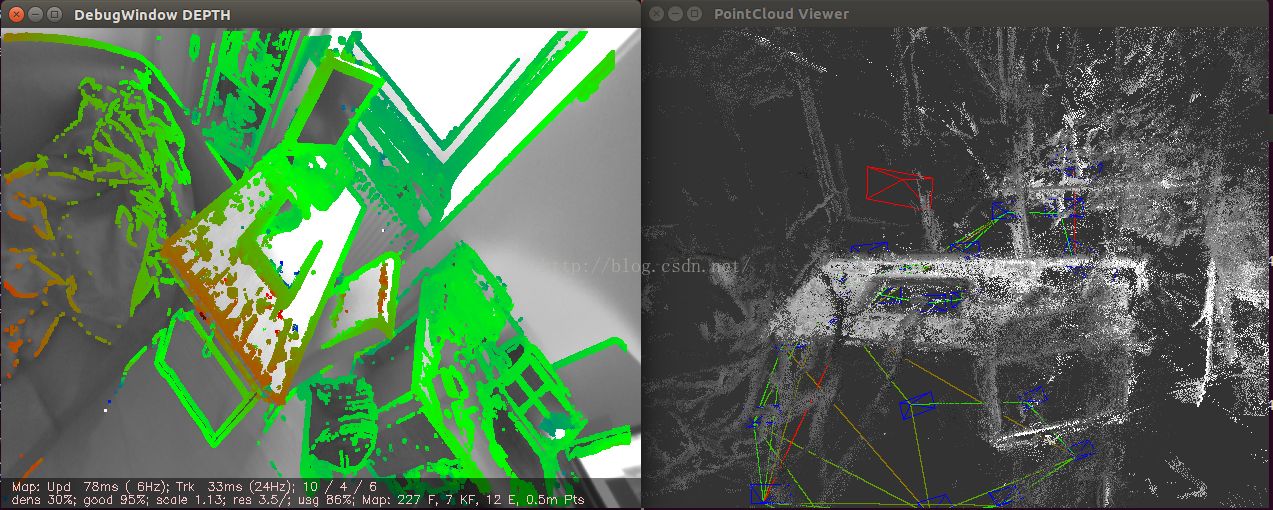
测试方法二(采用bag文件):
dennis@ubuntu:~$ roscore
dennis@ubuntu:~$ rosrun lsd_slam_viewer viewer
dennis@ubuntu:~$ rosrun lsd_slam_core live_slam image:=/image_raw camera_info:=/camera_info
dennis@ubuntu:~$ rosbag play LSD_room.bag
后记
这里只是做了简单的测试,获取直接的感官认识,后续将仔细阅读论文,阅读源代码,深入理解其实现原理及过程.
参考资料:
[1] https://github.com/tum-vision/lsd_slam LSD_SLAM官网
[2] http://vision.in.tum.de/research/vslam/lsdslam 德国慕尼黑工业大学(TUM)计算机视觉组 [3] http://wiki.ros.org/indigo/Installation/Ubuntu 在Ubuntu14.04.4上安装ROS Indigo
[4] http://releases.ubuntu.com/14.04/ 官网下载ubuntu-14.04.4-desktop-i386.iso
[5] http://wiki.ros.org/ROS/Tutorials 用于ROS安装成功之后的测试
[6] http://www.dev47apps.com/droidcam/linuxx/ 将手机摄像头的视频传输到电脑上的工具
作者:雨水/家辉 日期:2016-05-30 CSDN博客:http://blog.csdn.net/gobitan
摘要:LSD-SLAM是一个实时的单目SLAM. 它能实时地在电脑上直接(不使用关键点和特征)创建大规模的半稠密地图,甚至可以运行在智能手机上,如Android/iOS.
第一步:搭建Ubuntu14.04.4+ROS indigo基础环境
[1] 在http://releases.ubuntu.com/14.04/官网下载ubuntu-14.04.4-desktop-i386.iso安装包,大约1G。然后在VMware Player里安装好,可以采用VMPlayer的Easy Install自动化安装整个过程不需要干预。
备注:因为ROS包含rviz可视化环境,因此需要选择桌面版。
[2] 将安装源换成阿里云的,如何换请参考http://mirrors.aliyun.com/help/ubuntu;
备注:强烈建议将安装源换成国内的,否则安装的时候要么速度慢,要么可能连不上。
[3] 在Ubuntu14.04.4中安装ROS indigo,参考:http://wiki.ros.org/indigo/Installation/Ubuntu
dennis@ubuntu:~$ sudo apt-get update
dennis@ubuntu:~$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
dennis@ubuntu:~$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 0xB01FA116
dennis@ubuntu:~$ sudo apt-get update
dennis@ubuntu:~$ sudo apt-get install ros-indigo-desktop-full
备注:这里采用的完整安装模式.
dennis@ubuntu:~$ sudo rosdep init
dennis@ubuntu:~$ rosdep update
dennis@ubuntu:~$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
dennis@ubuntu:~$ source ~/.bashrc
[4] 校验安装是否成功,输入roscore命令,如下:
dennis@ubuntu:~$ roscore
... logging to /home/dennis/.ros/log/9f2ace00-16b9-11e6-a10c-000c29b0df82/roslaunch-ubuntu-2078.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:44364/ ros_comm version 1.11.19
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.19
NODES
auto-starting new master
process[master]: started with pid [2090]
ROS_MASTER_URI=http://ubuntu:11311/
setting /run_id to 9f2ace00-16b9-11e6-a10c-000c29b0df82
process[rosout-1]: started with pid [2103]
started core service [/rosout]
[5] 安装ROS工具
dennis@ubuntu:~$ sudo apt-get install python-rosinstall
第二步:初始化ros编译环境及编译lsd_slam
dennis@ubuntu:~$ mkdir ~/rosbuild_ws
dennis@ubuntu:~$ cd ~/rosbuild_ws/
dennis@ubuntu:~/rosbuild_ws$ rosws init . /opt/ros/indigo
dennis@ubuntu:~/rosbuild_ws$ mkdir package_dir
dennis@ubuntu:~/rosbuild_ws$ rosws set ~/rosbuild_ws/package_dir -t .
dennis@ubuntu:~/rosbuild_ws$ echo "source ~/rosbuild_ws/setup.bash" >> ~/.bashrc
dennis@ubuntu:~/rosbuild_ws$ bash
dennis@ubuntu:~/rosbuild_ws$ cd package_dir/
dennis@ubuntu:~/rosbuild_ws/package_dir$
dennis@ubuntu:~/rosbuild_ws/package_dir$ sudo apt-get install ros-indigo-libg2o ros-indigo-cv-bridge liblapack-dev libblas-dev freeglut3-dev libqglviewer-dev libsuitesparse-dev libx11-dev
dennis@ubuntu:~/rosbuild_ws/package_dir$ git clone https://github.com/tum-vision/lsd_slam.git lsd_slam
dennis@ubuntu:~/rosbuild_ws/package_dir$ ls -lrt
total 4
drwxrwxr-x 5 dennis dennis 4096 May 8 03:30 lsd_slam
dennis@ubuntu:~/rosbuild_ws/package_dir$ rosmake lsd_slam
第三步:采用官方提供的数据集进行测试
备注:数据集下载请参考本文的参考资料[2].
测试方法一(采用image):
dennis@ubuntu:~$ roscore
dennis@ubuntu:~$ rosrun lsd_slam_viewer viewer
dennis@ubuntu:~$ rosrun lsd_slam_core dataset_slam _files:=/home/dennis/LSD_room/images _hz:=0 _calib:=/home/dennis/LSD_room/cameraCalibration.cfg
测试方法二(采用bag文件):
dennis@ubuntu:~$ roscore
dennis@ubuntu:~$ rosrun lsd_slam_viewer viewer
dennis@ubuntu:~$ rosrun lsd_slam_core live_slam image:=/image_raw camera_info:=/camera_info
dennis@ubuntu:~$ rosbag play LSD_room.bag
后记
这里只是做了简单的测试,获取直接的感官认识,后续将仔细阅读论文,阅读源代码,深入理解其实现原理及过程.
参考资料:
[1] https://github.com/tum-vision/lsd_slam LSD_SLAM官网
[2] http://vision.in.tum.de/research/vslam/lsdslam 德国慕尼黑工业大学(TUM)计算机视觉组 [3] http://wiki.ros.org/indigo/Installation/Ubuntu 在Ubuntu14.04.4上安装ROS Indigo
[4] http://releases.ubuntu.com/14.04/ 官网下载ubuntu-14.04.4-desktop-i386.iso
[5] http://wiki.ros.org/ROS/Tutorials 用于ROS安装成功之后的测试
[6] http://www.dev47apps.com/droidcam/linuxx/ 将手机摄像头的视频传输到电脑上的工具

相关文章推荐
- 终极科普帖!VR、AR、MR、CR 管他什么R
- 苹果、微软、Google的下一战:未来智能眼镜
- 数据库之记录集AR
- 数据库之关系型AR
- xcode armv6 armv7 armv7s arm64
- 应用增强现实(Augmented Reality,AR) 技术展示产品
- 移植opencv2.4.9到itop4412开发板
- R12 AR INVOICE 接口表导入
- SLAM实践(1)
- 我的SLAM探索(二)--ROS下编译运行Kinect Viewer
- SLAM Learning Steps
- 利用矢量计算快速判定一点在直线的哪一侧
- 大幅面多相机高精度定位及测量解决方案
- 【测评】国外AR平台ENTITI测评-网页编辑器(1)
- 打破固有思维,谈谈AR到底能做什么
- 苹果确认正式收购面部动态捕捉公司Faceshift
- 国内AR编辑器『天眼』试用测评