旋转矩阵公式推导
2016-09-21 11:09
295 查看
1.在二维平面中:如下图所示,在xoy 平面中有一向量op⃗=(x,y) T ,旋转ϕ 角后变为向量op⃗ ′ =(x ′ ,y ′ ) T 。
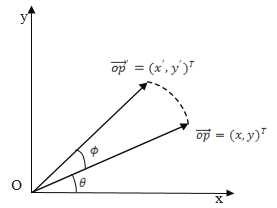
据图可得:x=|op⃗|cosθ;y=|op⃗|sinθ ,经旋转ϕ 角后有:
x ′ =|op⃗|cos(θ+ϕ)=|op⃗|(cosθcosϕ−sinθsinϕ)=xcosϕ−ysinϕ
y ′ =|op⃗|sin(θ+ϕ)=|op⃗|(sinθcosϕ+cosθsinϕ)=xsinϕ+ycosϕ;
写成矩阵形式:
(x ′ y ′ )=(cosϕsinϕ −sinϕcosϕ )(xy )
2.在三维空间中:如下图所示,若以坐标系的三个坐标轴X、Y、Z分别作为旋转轴,则点实际上只在垂直坐标轴的平面上作二维旋转。
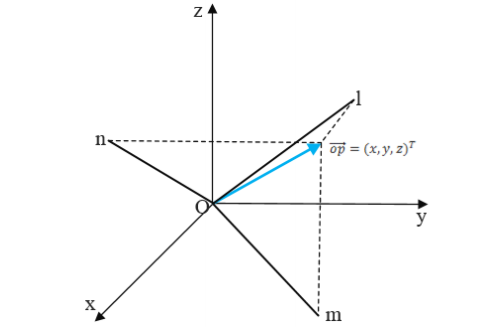
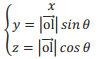
例: op⃗ 绕X轴旋转ϕ 角,有:
旋转前:
旋转后:

写成矩阵形式:
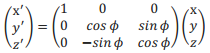
则绕X轴旋ϕ角的旋转矩阵为: R x (ϕ)=(100 0cosϕ−sinϕ 0sinϕcosϕ )
同理可得绕X、Y、Z轴旋转的不同角度的旋转矩阵(方向余弦矩阵)分别为:

最后,若op⃗ 绕某一定轴旋转,从欧拉定律中可知,绕着固定轴做一个角值的旋转,可以被视为分别以坐标系的三个坐标轴X、Y、Z作为旋转轴的旋转的叠加。

相关文章推荐
- 四旋翼飞行器旋转矩阵公式推导!
- Lucene学习总结之六:Lucene打分公式的数学推导 2014-06-25 14:20 384人阅读 评论(0) 收藏
- 深度学习算法之CNN、RNN、LSTM公式推导
- 类似三角形数的一般推导公式
- 二项分布期望和方差的公式推导
- 神经网络前向反向公式推导及说明
- 机器学习19-SVM线性可分公式推导(一)
- SVM原理---公式推导以及核函数
- UVALive_6602_Counting Lattice Squares(公式推导)
- hdu 2256 公式推导,小数取模问题
- 3D 坐标变换 公式 推导
- Expanding Rods(数学公式推导+二分)
- 透视纹理校正公式推导
- BP算法与公式推导
- 今天竟然忘记了余弦公式和点积公式的互相推导关系了。
- SVM数学公式推导及个人总结
- 如何制作平行四边形面积公式推导课件
- Hdu 2086 A1=?公式csflx推导
- BZOJ 3991(dfs序 + LCA 公式推导)
- 数论相关公式的推导