UE4控制三自由度动感平台
2016-08-10 21:44
183 查看
1. 动感平台物理结构
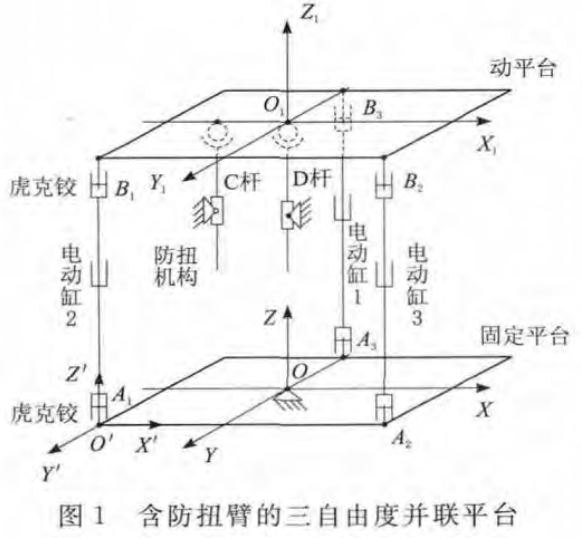
如图1所示,动感平台由动平台、固定平台、驱动支链及防扭臂组成。防扭臂通过球铰与动平台连接,D杆只能沿Z轴方向移动,C杆沿移动副平动同时可绕Y轴平行方向转动。平台具有3个自由度,分别是绕Y1轴的侧翻运动,绕X1轴的俯仰运动和沿Z1轴的竖直平动。
2. 动感平台逆解分析
逆解分析是已知动平台姿态 (α,β,zp),求解3根电动缸的长度,其中zp为动平台中心点O1在动平台Z方向的位移。2.1 UE4坐标系
UE4采用的是和Direct3D一致的左手坐标系,坐标向量为行向量,并且规定X轴正方向为右,Y轴正方向为外,Z轴正方向为上。绕轴旋转α时,必须知道哪个方向被认为“正”,那个方向被认为“负”,左手坐标系中定义此方向的规则为左手法则。当然,旋转轴在理论上市无限延伸的,但我们还是要认为它有正端点和负端点。与笛卡尔坐标轴定义坐标系相同,左手法则是这样的:伸出左手,大拇指向上,其余四指弯曲。大拇指指向旋转轴的正方向,此时,四指弯曲的方向就是旋转的正方向。平移变换
将三维空间中的一个点[x, y, z, 1]移动到另外一个点[x’, y’, z’, 1],三个坐标轴的移动分量分别为xp,Yp,Zp,即x’ = x + xp
y’ = y + yp
z’ = z + zp
平移变换的矩阵如下:
[x′y′z′1] = [xyz1] ⎡⎣⎢⎢⎢⎢100xp010yp001zp0001⎤⎦⎥⎥⎥⎥
旋转变换
绕X轴旋转时,顶点的x坐标不发生变化,y坐标和z坐标绕X轴旋转α度,旋转的正方向为顺时针方向(从轴的正端点向负端点看)。[x, y, z, 1]表示变换前的点,[x’, y’, z’, 1]表示变换后的点,变换矩阵如下:[x′y′z′1] = [xyz1] ⎡⎣⎢⎢⎢10000cosα−sinα00sinαcosα00001⎤⎦⎥⎥⎥
绕Y轴旋转时,顶点的y坐标不发生变化,x坐标和z坐标绕X轴旋转β度。[x, y, z, 1]表示变换前的点,[x’, y’, z’, 1]表示变换后的点,变换矩阵如下:
[x′y′z′1] = [xyz1] ⎡⎣⎢⎢⎢cosβ0sinβ00100−sinβ0cosβ00001⎤⎦⎥⎥⎥
绕Z轴旋转时,顶点的z坐标不发生变化,x坐标和y坐标绕X轴旋转θ度。[x, y, z, 1]表示变换前的点,[x’, y’, z’, 1]表示变换后的点,变换矩阵如下:
[x′y′z′1] = [xyz1] ⎡⎣⎢⎢⎢cosθ−sinθ00sinθcosθ0000100001⎤⎦⎥⎥⎥
仿射变换
将向量先旋转再平移,并假定旋转顺序为XYZ,依次绕X轴旋转α,绕Y轴旋转β,绕Z轴旋转θ。则变换矩阵为⎡⎣⎢⎢⎢10000cosα−sinα00sinαcosα00001⎤⎦⎥⎥⎥⎡⎣⎢⎢⎢cosβ0sinβ00100−sinβ0cosβ00001⎤⎦⎥⎥⎥⎡⎣⎢⎢⎢cosθ−sinθ00sinθcosθ0000100001⎤⎦⎥⎥⎥⎡⎣⎢⎢⎢⎢100xp010yp001zp0001⎤⎦⎥⎥⎥⎥=⎡⎣⎢⎢⎢⎢cosβcosθsinαsinβcosθ−cosαsinθcosαsinβcosθ+sinαsinθxpcosβsinθsinαsinβsinθ+cosαcosθcosαsinβsinθ−sinαcosθyp−sinβsinαcosβcosαcosβzp0001⎤⎦⎥⎥⎥⎥
参考链接
2.2 逆解分析
初始位置动定平台平行,平台虎克铰所组成三角形底边A1A2=B1B2=2b,底边高均为2h,则A1,A2,A3在固定坐标系下的齐次坐标为:⎡⎣⎢A1A2A3⎤⎦⎥=⎡⎣⎢−bb0hh−h000111⎤⎦⎥ (1)
设动坐标系原点O1在固定坐标系下的坐标为(0,0,L)。B1,B2,B3在动坐标系下的齐次坐标为:
⎡⎣⎢B1B2B3⎤⎦⎥=⎡⎣⎢−bb0hh−h000111⎤⎦⎥ (2)
动坐标系O1X1Y1Z1转动欧拉角为绕X轴旋转角度α,绕Y轴旋转角度β,并沿Z轴平动位移zp。这里θ=xp=yp=0则动坐标系相对固定坐标系OXYZ的变换矩阵可表示为:
T=⎡⎣⎢⎢⎢⎢cosβsinαsinβcosαsinβ00cosα−sinα0−sinβsinαcosβcosαcosβzp0001⎤⎦⎥⎥⎥⎥ (3)
由式(3)右乘式(2)齐次形式,可得到B1,B2,B3在固定坐标系下变换后的坐标为:
⎡⎣⎢B′1B′2B′3⎤⎦⎥=⎡⎣⎢−bb0hh−h000111⎤⎦⎥ ⎡⎣⎢⎢⎢⎢cosβsinαsinβcosαsinβ00cosα−sinα0−sinβsinαcosβcosαcosβzp0001⎤⎦⎥⎥⎥⎥=⎡⎣⎢−bcosβ+hsinαsinβbcosβ+hsinαsinβ−hsinαsinβhcosαhcosα−hcosαbsinβ+hsinαcosβ+zp−bsinβ+hsinαcosβ+zp−hsinαcosβ+zp111⎤⎦⎥
求向量A1B′1,A2B′2,A3B′3的模即为电动缸伸缩后的长度L1,L2,L3。

相关文章推荐
- 基于Eclipse的版本控制平台搭建
- Ubuntu搭建Openstack平台(kilo)(五.neutron(一)控制节点)
- [置顶] ESP8266+钛极OS(TiJOS)+面包板=JAVA控制物联网硬件平台[创客版]
- 搭建SourceGear Vault (SGV)版本控制平台
- android平台应用层控制GPIO口
- 基于ROS平台的移动机器人-4-通过ROS利用键盘控制小车移动
- P2P平台标的融资金额的超标控制
- 各平台各语言的终端颜色控制(可用于log)
- 利用Ptrace在Android平台实现应用程序控制
- UE4蓝图:流程控制的节点介绍
- 商业智能平台研究:ETL中的数据质量控制
- AgileEAS.NET平台之对象控制反转
- Tomcat 7.0-如何通过Web访问控制平台和管理平台
- 使用AudioTrack播放MP3 左右声道控制 之移植Libmad到android平台
- UE4移动平台上基于物理的着色
- .NET平台下带权限控制的TreeView控件节点生成算法 选择自 navy_koo 的 Blog
- 项目管理实践之版本控制工具SVN在Windows平台下的平台搭建
- Linux下apache+svn+ssl完美结合搭建安全版本控制平台
- 资源控制在大数据和云计算平台中的应用
- 迅为IMX6开发板适用于HMI|车载电脑|工业控制|医疗仪器|智能家居 灵活进行产品开发平台