OpneCV 二值图像区域处理
2016-07-20 14:04
260 查看
//--------------------------------------【程序说明】-------------------------------------------
// 在图像处理中总会遇到二值图像,故对二值图像中区域处理在所难免;
// 提取自己想要的区域部分对其处理;
// 此函数简单实现高亮度区域处理;
//------------------------------------------------------------------------------------------------
//---------------------------------【头文件、命名空间包含部分】----------------------------
// 描述:包含程序所使用的头文件和命名空间
//-------------------------------------------------------------------------------------------------
#include <opencv2/opencv.hpp>//头文件
using namespace cv;//包含cv命名空间
using namespace std;
//-----------------------------------【全局变量声明部分】--------------------------------------
// 描述:全局变量的声明
//-----------------------------------------------------------------------------------------------
Mat g_srcImage;
Mat g_grayImage;
Mat g_dstImage;
int g_nThresh_max = 255;
vector <vector<Point>> g_vContours;
//-----------------------------------【main( )函数】--------------------------------------------
int main()
{
// 读入待处理原始图像
g_srcImage = imread("C:/Users/Administrator/Desktop/2.jpg");
if(!g_srcImage.data ) { printf("读取图片错误,请确定目录下是否有imread函数指定的图片存在~! \n"); return false; }
imshow("原始图",g_srcImage);
//--------------------------------------------------------------------------------------------------
//--------------------------根据高亮度特征--------------------------------------------
cvtColor(g_srcImage,g_grayImage,CV_BGR2GRAY);
imshow("灰度图",g_grayImage);
//adaptiveThreshold(g_grayImage,g_grayImage,g_nThresh_max,ADAPTIVE_THRESH_MEAN_C,THRESH_BINARY,3,0);//自动阈值
//threshold(g_grayImage,g_grayImage,100,255,THRESH_BINARY);
threshold(g_grayImage,g_grayImage,0,g_nThresh_max,CV_THRESH_OTSU);
imshow("高亮度图像",g_grayImage);
//waitKey(0);
//-----------------------------------------------------------------------------------------------------------
// 进行闭运算操作
Mat element = getStructuringElement(MORPH_RECT, Size(4, 4));
morphologyEx(g_grayImage,g_dstImage, MORPH_CLOSE, element);
// 查找需要填充区域的轮廓
vector <Vec4i> hierarchy;
findContours(g_dstImage,g_vContours,hierarchy,CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
// 将轮廓内填充
if( !g_vContours.empty() & !hierarchy.empty() )
{
for (int idx=0;idx < g_vContours.size();idx++)
{
drawContours(g_dstImage,g_vContours,idx,Scalar::all(255),CV_FILLED,8);//填充轮廓内部
}
}
//------------------------------------------------------------------------------------------------
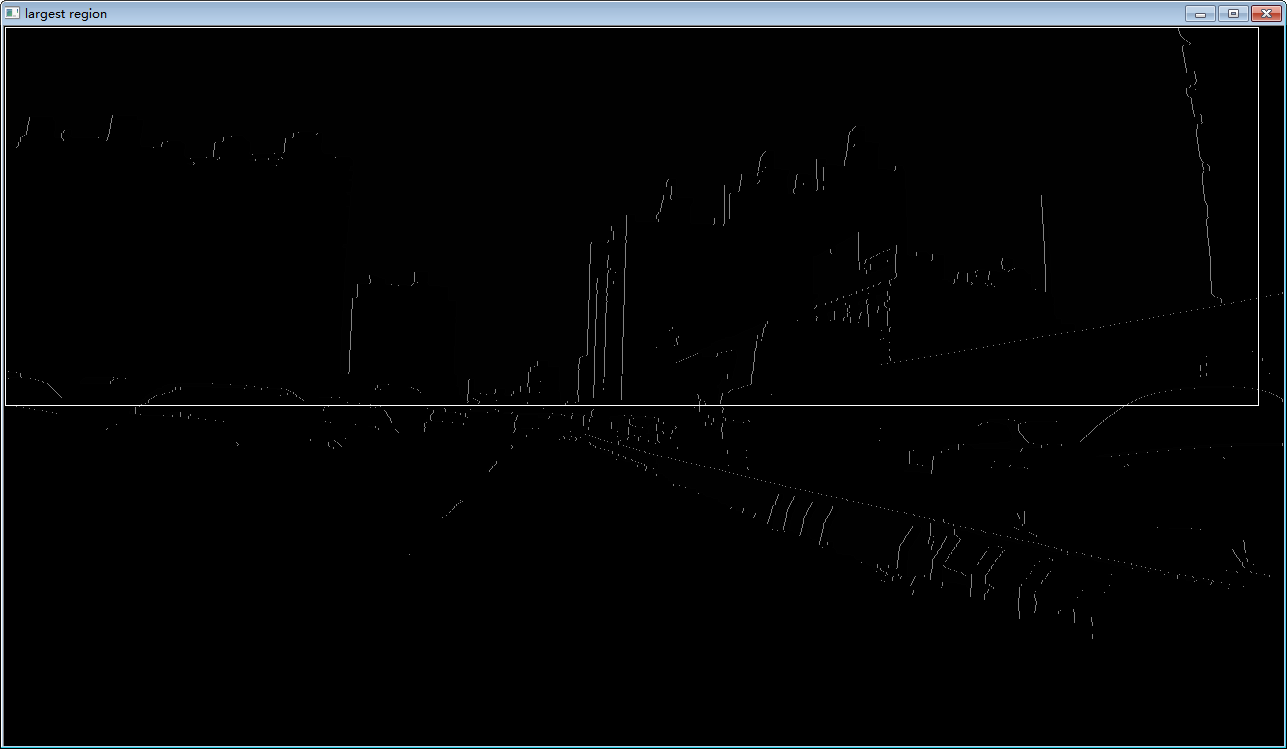
//-----------------------------取面积最大的一块----------------------------------------
double maxArea = 0;
vector <Point> maxContour;
findContours(g_dstImage,g_vContours,hierarchy,CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
if( !g_vContours.empty() && !hierarchy.empty() )
{
for (int idx=0;idx < g_vContours.size();idx++)
{
double contArea = contourArea(g_vContours[idx]);//当前区域的面积
// 求最大面积的区域
if( contArea>maxArea )
{
maxArea = contArea;
maxContour = g_vContours[idx];
}
}
}
// 将轮廓转为矩形框
Rect maxRect = boundingRect(maxContour);
// 显示连通域
Mat result1, result2;
g_dstImage.copyTo(result1);
g_dstImage.copyTo(result2);
for (size_t i = 0; i < g_vContours.size(); i++)
{
Rect r = boundingRect(g_vContours[i]);
rectangle(result1, r,Scalar(255));
}
imshow("all regions", result1) ;
rectangle(result2, maxRect, Scalar(255));
imshow("largest region", result2) ;
waitKey(0);
}




相关文章推荐
- [Funkunux] Linux_2.6.22.6 内核start_kernel函数分析之console_init
- 在centos6.5中安装 GitLab 全过程和问题记录
- Hadoop的MR程序中map的个数
- BusyBox 简化嵌入式 Linux 系统【转】
- nginx配置
- tar.gz tar bz2 zip
- Linux设备模型(热插拔、mdev 与 firmware)【转】
- 在yum 安装(docker方式安装)的redis 配置认证密码 和 限定IP登录
- LINUX_端口加到防火墙
- Docker入门-镜像、容器、仓库简单命令
- linux根文件系统制作之busybox编译和系统构建【转】
- Linux释放内存脚本
- greenplum编译安装
- Linux常用命令
- bad interpreter: 没有那个文件或目录
- shell截取字符串的方法
- VMware下最小化安装centos 7 后上网设置
- jdk and tomcat 环境变量配置
- mysql heartbeat 高可用
- 使用linux c 实现linux控制台 ls 命令