机电传动控制第四周学习笔记和仿真作业
2016-03-20 22:15
323 查看
机电传动控制第四周学习笔记
三相异步电机的基本结构由定子和转子组成。其中定子由铁芯,绕组和机座组成,转子由铁芯和绕组组成。
旋转磁场的级数和旋转速度
N0=60f/p
3.转差率 S=(n0-n)/n0
4.定子绕组有星形连接和三角形连接两种
5.三相异步电机的固有机械特性有四个特殊点:
T=0,n=n0(S=0)理想空载工作点
T=TN,n=nN(S=SN) 额定工作点
T=Tst,n=0(S=1) 启动工作点
T=Tmax,n=nm(S=Sm) 临界工作点
6.降压时的人为机械特性:Sm不变,Tmax减小,人为与固有的转矩之比等于相应电压的二次方之比
7.定子电路串接电阻或电抗的人为机械特性:与降压相似
8.笼型异步电机的启动方法:
直接启动 : Ist/IN<=0.75+电源总容量/(4x电动机功率)
电阻降压启动:适用于空载和轻载,不经济
Y-降压启动:启动电流小,经济,但启动转矩小,且启动电压不能按实际需求调节,适用空载和轻载。
自耦变压器降压调节:不适用于频繁的启动,适用于启动转矩大,容量较大的电机。
9.三相异步电机的调速有变级对数调速,变转差率调速和变频调速。
10.制动特性:反馈制动,反接制动,能耗制动。
仿真结果:
采用了全压启动,转子串接电阻调速,以及电源反接进行制动
代码:
model SACIM "A Simple AC Induction Motor Model"
type Voltage=Real(unit="V");
type Current=Real(unit="A");
type Resistance=Real(unit="Ohm");
type Inductance=Real(unit="H");
type Speed=Real(unit="r/min");
type Torque=Real(unit="N.m");
type Inertia=Real(unit="kg.m^2");
type Frequency=Real(unit="Hz");
type Flux=Real(unit="Wb");
type Angle=Real(unit="rad");
type AngularVelocity=Real(unit="rad/s");
constant Real Pi = 3.1415926;
Current i_A"A Phase Current of Stator";
Current i_B"B Phase Current of Stator";
Current i_C"C Phase Current of Stator";
Voltage u_A"A Phase Voltage of Stator";
Voltage u_B"B Phase Voltage of Stator";
Voltage u_C"C Phase Voltage of Stator";
Current i_a"A Phase Current of Rotor";
Current i_b"B Phase Current of Rotor";
Current i_c"C Phase Current of Rotor";
Frequency f_s"Frequency of Stator";
Torque Tm"Torque of the Motor";
Speed n"Speed of the Motor";
Flux Psi_A"A Phase Flux-Linkage of Stator";
Flux Psi_B"B Phase Flux-Linkage of Stator";
Flux Psi_C"C Phase Flux-Linkage of Stator";
Flux Psi_a"a Phase Flux-Linkage of Rotor";
Flux Psi_b"b Phase Flux-Linkage of Rotor";
Flux Psi_c"c Phase Flux-Linkage of Rotor";
Angle phi"Electrical Angle of Rotor";
Angle phi_m"Mechnical Angle of Rotor";
AngularVelocity w"Angular Velocity of Rotor";
Torque Tl"Load Torque";
Resistance Rs"Stator Resistance";
parameter Resistance Rr=0.408"Rotor Resistance";
parameter Inductance Ls = 0.00252"Stator Leakage Inductance";
parameter Inductance Lr = 0.00252"Rotor Leakage Inductance";
parameter Inductance Lm = 0.00847"Mutual Inductance";
parameter Frequency f_N = 50"Rated Frequency of Stator";
parameter Voltage u_N = 220"Rated Phase Voltage of Stator";
parameter Real p =2"number of pole pairs";
parameter Inertia Jm = 0.1"Motor Inertia";
parameter Inertia Jl = 0.1"Load Inertia";
parameter Real s1=0.5369"frequency rate";
parameter Real s2=0.056"stable frequency rate";
parameter Real s3=0.4026"another frequency rate";
parameter Real P=0.7"stoping rate";
initial equation
Psi_A = 0;
Psi_B = 0;
Psi_C = 0;
Psi_a = 0;
Psi_b = 0;
Psi_c = 0;
phi = 0;
w = 0;
equation
u_A = Rs * i_A + 1000 * der(Psi_A);
u_B = Rs * i_B + 1000 * der(Psi_B);
u_C = Rs * i_C + 1000 * der(Psi_C);
0 = Rr * i_a + 1000 * der(Psi_a);
0 = Rr * i_b + 1000 * der(Psi_b);
0 = Rr * i_c + 1000 * der(Psi_c)
Psi_A = (Lm+Ls)*i_A + (-0.5*Lm)*i_B + (-0.5*Lm)*i_C + (Lm*cos(phi))*i_a + (Lm*cos(phi+2*Pi/3))*i_b + (Lm*cos(phi-2*Pi/3))*i_c;
Psi_B = (-0.5*Lm)*i_A + (Lm+Ls)*i_B + (-0.5*Lm)*i_C + (Lm*cos(phi-2*Pi/3))*i_a + (Lm*cos(phi))*i_b + (Lm*cos(phi+2*Pi/3))*i_c;
Psi_C = (-0.5*Lm)*i_A + (-0.5*Lm)*i_B + (Lm+Ls)*i_C + (Lm*cos(phi+2*Pi/3))*i_a + (Lm*cos(phi-2*Pi/3))*i_b + (Lm*cos(phi))*i_c;
Psi_a = (Lm*cos(phi))*i_A + (Lm*cos(phi-2*Pi/3))*i_B + (Lm*cos(phi+2*Pi/3))*i_C + (Lm+Lr)*i_a + (-0.5*Lm)*i_b + (-0.5*Lm)*i_c;
Psi_b = (Lm*cos(phi+2*Pi/3))*i_A + (Lm*cos(phi))*i_B + (Lm*cos(phi-2*Pi/3))*i_C + (-0.5*Lm)*i_a + (Lm+Lr)*i_b + (-0.5*Lm)*i_c;
Psi_c = (Lm*cos(phi-2*Pi/3))*i_A + (Lm*cos(phi+2*Pi/3))*i_B + (Lm*cos(phi))*i_C + (-0.5*Lm)*i_a + (-0.5*Lm)*i_b + (Lm+Lr)*i_c;
Tm=-p*Lm*((i_A*i_a+i_B*i_b+i_C*i_c)*sin(phi)+(i_A*i_b+i_B*i_c+i_C*i_a)*sin(phi+2*Pi/3)+(i_A*i_c+i_B*i_a+i_C*i_b)*sin(phi-2*Pi/3));
w = 1000 * der(phi_m);
phi_m = phi/p;
n= w*60/(2*Pi);
Tm-Tl = (Jm+Jl) * 1000 * der(w);
Tl = 10;
if time <= 100 then
f_s = 0;
Rs = 0.531;
u_A = 0;
u_B = 0;
u_C = 0;
elseif time<=810 then
f_s = f_N*s1;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
elseif time<=815 then
f_s = f_N*s1;
Rs = 8;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
elseif time<=970 then
f_s = f_N*s1;
Rs = 0.6;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
elseif time<=1000then
f_s = f_N*s1;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
elseif time<=1500 then
f_s = f_N*s2;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s2;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s2;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s2;
elseif time<=1515 then
f_s = f_N*s3;
Rs = 5;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s3;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s3;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s3;
elseif time<=2220 then
f_s = f_N*s3;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s3;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s3;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s3;
elseif time<=2250 then
f_s = f_N*P*s1;
Rs = 3.5;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1*P;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1*P;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1*P;
elseif time<=2410 then
f_s = f_N*s1;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
else
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s2;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s2;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s2;
f_s = f_N*s2;
Rs = 0.531;
end if;
end SACIM;
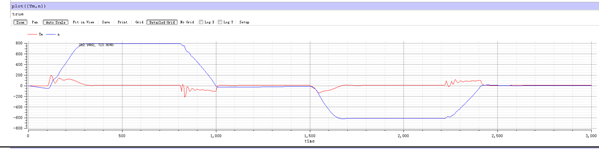
100-300ms加速
300-800ms恒速800r/min
800-1000ms减速
1000-1500ms保持静止
1500-1650ms加速下降
1650-2250ms恒速600r/min
2250-2410ms减速到静止
总用时2410ms
三相异步电机的基本结构由定子和转子组成。其中定子由铁芯,绕组和机座组成,转子由铁芯和绕组组成。
旋转磁场的级数和旋转速度
N0=60f/p
3.转差率 S=(n0-n)/n0
4.定子绕组有星形连接和三角形连接两种
5.三相异步电机的固有机械特性有四个特殊点:
T=0,n=n0(S=0)理想空载工作点
T=TN,n=nN(S=SN) 额定工作点
T=Tst,n=0(S=1) 启动工作点
T=Tmax,n=nm(S=Sm) 临界工作点
6.降压时的人为机械特性:Sm不变,Tmax减小,人为与固有的转矩之比等于相应电压的二次方之比
7.定子电路串接电阻或电抗的人为机械特性:与降压相似
8.笼型异步电机的启动方法:
直接启动 : Ist/IN<=0.75+电源总容量/(4x电动机功率)
电阻降压启动:适用于空载和轻载,不经济
Y-降压启动:启动电流小,经济,但启动转矩小,且启动电压不能按实际需求调节,适用空载和轻载。
自耦变压器降压调节:不适用于频繁的启动,适用于启动转矩大,容量较大的电机。
9.三相异步电机的调速有变级对数调速,变转差率调速和变频调速。
10.制动特性:反馈制动,反接制动,能耗制动。
仿真结果:
采用了全压启动,转子串接电阻调速,以及电源反接进行制动
代码:
model SACIM "A Simple AC Induction Motor Model"
type Voltage=Real(unit="V");
type Current=Real(unit="A");
type Resistance=Real(unit="Ohm");
type Inductance=Real(unit="H");
type Speed=Real(unit="r/min");
type Torque=Real(unit="N.m");
type Inertia=Real(unit="kg.m^2");
type Frequency=Real(unit="Hz");
type Flux=Real(unit="Wb");
type Angle=Real(unit="rad");
type AngularVelocity=Real(unit="rad/s");
constant Real Pi = 3.1415926;
Current i_A"A Phase Current of Stator";
Current i_B"B Phase Current of Stator";
Current i_C"C Phase Current of Stator";
Voltage u_A"A Phase Voltage of Stator";
Voltage u_B"B Phase Voltage of Stator";
Voltage u_C"C Phase Voltage of Stator";
Current i_a"A Phase Current of Rotor";
Current i_b"B Phase Current of Rotor";
Current i_c"C Phase Current of Rotor";
Frequency f_s"Frequency of Stator";
Torque Tm"Torque of the Motor";
Speed n"Speed of the Motor";
Flux Psi_A"A Phase Flux-Linkage of Stator";
Flux Psi_B"B Phase Flux-Linkage of Stator";
Flux Psi_C"C Phase Flux-Linkage of Stator";
Flux Psi_a"a Phase Flux-Linkage of Rotor";
Flux Psi_b"b Phase Flux-Linkage of Rotor";
Flux Psi_c"c Phase Flux-Linkage of Rotor";
Angle phi"Electrical Angle of Rotor";
Angle phi_m"Mechnical Angle of Rotor";
AngularVelocity w"Angular Velocity of Rotor";
Torque Tl"Load Torque";
Resistance Rs"Stator Resistance";
parameter Resistance Rr=0.408"Rotor Resistance";
parameter Inductance Ls = 0.00252"Stator Leakage Inductance";
parameter Inductance Lr = 0.00252"Rotor Leakage Inductance";
parameter Inductance Lm = 0.00847"Mutual Inductance";
parameter Frequency f_N = 50"Rated Frequency of Stator";
parameter Voltage u_N = 220"Rated Phase Voltage of Stator";
parameter Real p =2"number of pole pairs";
parameter Inertia Jm = 0.1"Motor Inertia";
parameter Inertia Jl = 0.1"Load Inertia";
parameter Real s1=0.5369"frequency rate";
parameter Real s2=0.056"stable frequency rate";
parameter Real s3=0.4026"another frequency rate";
parameter Real P=0.7"stoping rate";
initial equation
Psi_A = 0;
Psi_B = 0;
Psi_C = 0;
Psi_a = 0;
Psi_b = 0;
Psi_c = 0;
phi = 0;
w = 0;
equation
u_A = Rs * i_A + 1000 * der(Psi_A);
u_B = Rs * i_B + 1000 * der(Psi_B);
u_C = Rs * i_C + 1000 * der(Psi_C);
0 = Rr * i_a + 1000 * der(Psi_a);
0 = Rr * i_b + 1000 * der(Psi_b);
0 = Rr * i_c + 1000 * der(Psi_c)
Psi_A = (Lm+Ls)*i_A + (-0.5*Lm)*i_B + (-0.5*Lm)*i_C + (Lm*cos(phi))*i_a + (Lm*cos(phi+2*Pi/3))*i_b + (Lm*cos(phi-2*Pi/3))*i_c;
Psi_B = (-0.5*Lm)*i_A + (Lm+Ls)*i_B + (-0.5*Lm)*i_C + (Lm*cos(phi-2*Pi/3))*i_a + (Lm*cos(phi))*i_b + (Lm*cos(phi+2*Pi/3))*i_c;
Psi_C = (-0.5*Lm)*i_A + (-0.5*Lm)*i_B + (Lm+Ls)*i_C + (Lm*cos(phi+2*Pi/3))*i_a + (Lm*cos(phi-2*Pi/3))*i_b + (Lm*cos(phi))*i_c;
Psi_a = (Lm*cos(phi))*i_A + (Lm*cos(phi-2*Pi/3))*i_B + (Lm*cos(phi+2*Pi/3))*i_C + (Lm+Lr)*i_a + (-0.5*Lm)*i_b + (-0.5*Lm)*i_c;
Psi_b = (Lm*cos(phi+2*Pi/3))*i_A + (Lm*cos(phi))*i_B + (Lm*cos(phi-2*Pi/3))*i_C + (-0.5*Lm)*i_a + (Lm+Lr)*i_b + (-0.5*Lm)*i_c;
Psi_c = (Lm*cos(phi-2*Pi/3))*i_A + (Lm*cos(phi+2*Pi/3))*i_B + (Lm*cos(phi))*i_C + (-0.5*Lm)*i_a + (-0.5*Lm)*i_b + (Lm+Lr)*i_c;
Tm=-p*Lm*((i_A*i_a+i_B*i_b+i_C*i_c)*sin(phi)+(i_A*i_b+i_B*i_c+i_C*i_a)*sin(phi+2*Pi/3)+(i_A*i_c+i_B*i_a+i_C*i_b)*sin(phi-2*Pi/3));
w = 1000 * der(phi_m);
phi_m = phi/p;
n= w*60/(2*Pi);
Tm-Tl = (Jm+Jl) * 1000 * der(w);
Tl = 10;
if time <= 100 then
f_s = 0;
Rs = 0.531;
u_A = 0;
u_B = 0;
u_C = 0;
elseif time<=810 then
f_s = f_N*s1;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
elseif time<=815 then
f_s = f_N*s1;
Rs = 8;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
elseif time<=970 then
f_s = f_N*s1;
Rs = 0.6;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
elseif time<=1000then
f_s = f_N*s1;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
elseif time<=1500 then
f_s = f_N*s2;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s2;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s2;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s2;
elseif time<=1515 then
f_s = f_N*s3;
Rs = 5;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s3;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s3;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s3;
elseif time<=2220 then
f_s = f_N*s3;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s3;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s3;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s3;
elseif time<=2250 then
f_s = f_N*P*s1;
Rs = 3.5;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1*P;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1*P;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1*P;
elseif time<=2410 then
f_s = f_N*s1;
Rs = 0.531;
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s1;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s1;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s1;
else
u_A = u_N * 1.414 * sin(2*Pi*f_s*time/1000)*s2;
u_B = u_N * 1.414 * sin(2*Pi*f_s*time/1000-2*Pi/3)*s2;
u_C = u_N * 1.414 * sin(2*Pi*f_s*time/1000-4*Pi/3)*s2;
f_s = f_N*s2;
Rs = 0.531;
end if;
end SACIM;
100-300ms加速
300-800ms恒速800r/min
800-1000ms减速
1000-1500ms保持静止
1500-1650ms加速下降
1650-2250ms恒速600r/min
2250-2410ms减速到静止
总用时2410ms

相关文章推荐
- 第三周作业(一)
- SSM ( Spring 、 SpringMVC 和 Mybatis )配置详解
- SQL SERVER-触发器
- JS中decodeURI()与decodeURIComponent()区别
- asp.net原理
- for语句在$(function(){})之外出错
- Lesson 9 View port
- 线程学习(二)——线程同步,死锁
- 浅谈Java中的hashcode方法
- Hibernate QBC查询
- VS2013安装
- 猎豹MFC--MCI媒体控制接口--播放各种音频视频录音
- 怎样学习java——关于我的建议(后期完善)
- PHP简单计算器
- hdu1272 并查集
- Android进阶之AlertDialog自定义
- GPUImage使用简介
- 严苛模式解决NetworkOnMainThreadException
- 用C#学习数据结构之线性表
- android(eclipse)编程中常见的java问题总结(四)