hdu 1593(数学)
2016-03-03 19:39
176 查看
转载标记处:http://www.xuebuyuan.com/2131627.html
往相反的方面跑,但是,最理想的初始位置并不是圆点和圆上的某一点,应该还有更理想的初始逃跑状态.这里有一点需要注意,就是逃跑者极力想达到理想逃跑初态,而追赶者极力阻止逃跑者达到这一状态,所以,理想初态应该是无论追赶者如何阻止,逃跑者仍然可以达到的理想状态.最理想的逃跑初态如图:
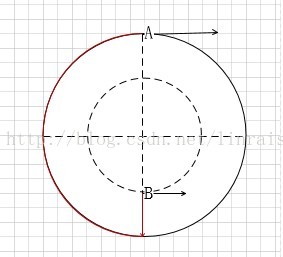
图:两个同心圆具有相同的角速度,并且A,B,0处于同一直线上.
下面来解释为何这是最理想的状态:
为什么这是最理想的初态?
因为B离岸最近,而A离B的上岸点最远(红色线路)
还有没有比这个状态更好的初始态?
假定B此时移动,那么A的线速度就会比B大,则二者的距离会缩小.新状态不是最优.
为什么可以达到这个初态?
在内圆内部,B的角速度都会比A的角速度大,因此无论A如何移动,B都可以利用角速度的优势使得A,B,O同线并且
向外挪到这个最理想状态.
剩下的工作就很容易了,B使劲往对岸游,而A绕半圆弧使劲追,比较到达时间就可以判断了.
往相反的方面跑,但是,最理想的初始位置并不是圆点和圆上的某一点,应该还有更理想的初始逃跑状态.这里有一点需要注意,就是逃跑者极力想达到理想逃跑初态,而追赶者极力阻止逃跑者达到这一状态,所以,理想初态应该是无论追赶者如何阻止,逃跑者仍然可以达到的理想状态.最理想的逃跑初态如图:
图:两个同心圆具有相同的角速度,并且A,B,0处于同一直线上.
下面来解释为何这是最理想的状态:
为什么这是最理想的初态?
因为B离岸最近,而A离B的上岸点最远(红色线路)
还有没有比这个状态更好的初始态?
假定B此时移动,那么A的线速度就会比B大,则二者的距离会缩小.新状态不是最优.
为什么可以达到这个初态?
在内圆内部,B的角速度都会比A的角速度大,因此无论A如何移动,B都可以利用角速度的优势使得A,B,O同线并且
向外挪到这个最理想状态.
剩下的工作就很容易了,B使劲往对岸游,而A绕半圆弧使劲追,比较到达时间就可以判断了.
#include <iostream>
#include <math.h>
using namespace std;
const double pi = acos(-1.0);
int main()
{
double r,r1,v1,v2,t1,t2;
while(cin >> r >> v1 >> v2)
{
r1 = r/v2*v1;
t1 = (r-r1)/v1;
t2 = pi*r/v2;
if (t1 < t2)
puts("Yes");
else
puts("No");
}
return 0;
}
