SAD算法的OpenCV实现
2016-01-13 16:30
375 查看
SAD立体匹配算法在opencv中的实现
我运行该算法之后,总在控制台显示完行号之后产生中断,然后一直无法继续,程序指针停留在第155行的cvReleaseImage(&winImg); 这里。
**
例程中的generateDisparityImage()方法里面new出来的数组元素个数为DSR个,而后面的计算视差空间图像的循环次数为DSR+1次,导致数组越界,因此程序总是崩溃。
**
不过为什么不是刚越界就报错,而是会在所有浮动框扫描完整幅图像之后才停止运行程序,这里还是不太明白。
**
**
**
我运行该算法之后,总在控制台显示完行号之后产生中断,然后一直无法继续,程序指针停留在第155行的cvReleaseImage(&winImg); 这里。
**
【原因】
**例程中的generateDisparityImage()方法里面new出来的数组元素个数为DSR个,而后面的计算视差空间图像的循环次数为DSR+1次,导致数组越界,因此程序总是崩溃。
【解决方法】
将第145行处的while(d<=DSR);改成小于号即可运行。**
【仍然存在的疑问】
**不过为什么不是刚越界就报错,而是会在所有浮动框扫描完整幅图像之后才停止运行程序,这里还是不太明白。
**
**
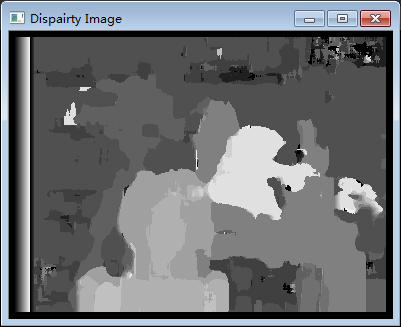
【程序结果】
**
下面是原来的代码(还未修改)
**// Sum of Absolute Difference(SAD)
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
#include <cv.h>
#include <cxcore.h>
#include <highgui.h>
#include <math.h>
#include <ctime>
using namespace std;
template<class T> class Image
{
private:
IplImage* imgp;
public:
Image(IplImage* img=0){imgp=img;}
~Image(){imgp=0;}
void operator=(IplImage* img){imgp=img;}
inline T* operator[](const int rowIndx)
{
return((T*)(imgp->imageData+rowIndx*imgp->widthStep));
}
};
typedef struct
{
unsigned char b,g,r;
}RgbPixel;
typedef struct
{
float b,g,r;
}RgbPixelFloat;
typedef Image<RgbPixel> RgbImage;
typedef Image<RgbPixelFloat> RgbImageFloat;
typedef Image<unsigned char> BwImage;
typedef Image<float> BwImageFloat;
//display an image in a new window with title to be given.
void displayImageNewWindow(char* title,CvArr* img)
{
cvNamedWindow(title, CV_WINDOW_AUTOSIZE );
cvShowImage(title,img);
}
int getMaxMin(double value[],int valueSize, int maxmin)
{
int pos=0;
int i=0;
double max1=-1;//?-999999;
double min1=999999;
if (maxmin==1)
{
//find max
for (i=0;i<valueSize;i++)
{
//find the index with the max value;
if (value[i]>max1)
{
pos=i;
max1=value[i];
}
}
}
if (maxmin==0)
{
//find min
for (i=0;i<valueSize;i++)
{
//find the index with the minimum value;
if (value[i]<min1)
{
pos=i;
min1=value[i];
}
}
}
return pos;
}
IplImage* generateDisparityImage(IplImage* greyLeftImg32,IplImage* greyRightImg32,int windowSize,int DSR)
{
int offset=floor((double)windowSize/2);
int height=greyLeftImg32->height;
int width=greyLeftImg32->width;
double* localSAD=new double[DSR];
int x=0, y=0,d=0,m=0;
int N=windowSize;
IplImage* winImg=cvCreateImage(cvSize(N,N),32,1);//mySubImage(greyLeftImg32,cvRect(0,0,N,N));
IplImage* disparity=cvCreateImage(cvSize(width,height),8,1);//or IPL_DEPTH_8U
BwImage imgA(disparity);
for (y=0;y<height;y++)
{
for (x=0;x<width;x++)
{
imgA[y][x]=0;
}
}
CvScalar sum;
//CvScalar s2;
for (y=0;y<height-N;y++)
{
//height-N
for (x=0;x<width-N;x++)
{
//width-N
cvSetImageROI(greyLeftImg32, cvRect(x,y,N,N));
d=0;
//initialise localSAD
for (m=0;m<DSR;m++)
{
localSAD[m]=0;
}
//start matching
do{
if (x-d>=0)
{
cvSetImageROI(greyRightImg32, cvRect(x-d,y,N,N));
}
else
{
break;
}
cvAbsDiff(greyLeftImg32,greyRightImg32,winImg);//absolute difference
sum=cvSum(winImg);//sum
localSAD[d]=sum.val[0];//0 means single channel
cvResetImageROI(greyRightImg32);
d++;
}while(d<=DSR);
//to find the best d and store
imgA[y+offset][x+offset]=getMaxMin(localSAD,DSR,0)*16; //0 means return minimum index
cvResetImageROI(greyLeftImg32);
}//x
if (y%10==0)
cout<<"row="<<y<<" of "<<height<<endl;
}//y
cvReleaseImage(&winImg);
//cvReleaseImage(&rightWinImg);
return disparity;
}
int main (int argc, char * const argv[])
{
cout << "Sum of Absolute Difference(SAD) Strereo Vision"<<endl;
//**********image input*********************//
char* filename1="L.jpg";//im2_cone.png
IplImage* greyLeftImg= cvLoadImage(filename1,0);
char* filename2="R.jpg";
IplImage* greyRightImg= cvLoadImage(filename2,0);
if (greyLeftImg==NULL){cout << "No valid image input."<<endl; return 1;}
if (greyRightImg==NULL){cout << "No valid image input."<<endl; return 1;}
int width=greyLeftImg->width;
int height=greyLeftImg->height;
/****************8U to 32F**********************/
IplImage* greyLeftImg32=cvCreateImage(cvSize(width,height),32,1);//IPL_DEPTH_32F
IplImage* greyRightImg32=cvCreateImage(cvSize(width,height),32,1);
cvConvertScale(greyLeftImg, greyLeftImg32, 1/255.);
cvConvertScale(greyRightImg, greyRightImg32, 1/255.);//1/255. equals to 1/255.0
//-------------obtain disparity image----------------
time_t tstart, tend;
tstart = time(0);
int windowSize=13,DSR=20;//Disparity Search Range
IplImage* disparity32=generateDisparityImage(greyLeftImg32,greyRightImg32,windowSize,DSR);
tend = time(0);
cout << "It took "<< difftime(tend, tstart) <<" second(s)."<< endl;
displayImageNewWindow("Dispairty Image",disparity32);
displayImageNewWindow("Left Image",greyLeftImg32);
displayImageNewWindow("Right Image",greyRightImg32);
//cvSaveImage("D:/OpenCV_stuff/SampleImages/disparitySAD.jpg",disparity32);
//********destroy window************/
cvWaitKey(0);
cvReleaseImage(&greyLeftImg32);
cvReleaseImage(&greyRightImg32);
cvReleaseImage(&greyLeftImg);
cvReleaseImage(&greyRightImg);
cvReleaseImage(&disparity32);
cvDestroyWindow("Left Image");
cvDestroyWindow("Right Image");
cvDestroyWindow("Dispairty Image");
return 0;
}

相关文章推荐
- 书评:《算法之美( Algorithms to Live By )》
- 动易2006序列号破解算法公布
- Ruby实现的矩阵连乘算法
- C#插入法排序算法实例分析
- 超大数据量存储常用数据库分表分库算法总结
- C#数据结构与算法揭秘二
- C#冒泡法排序算法实例分析
- 算法练习之从String.indexOf的模拟实现开始
- C#算法之关于大牛生小牛的问题
- C#实现的算24点游戏算法实例分析
- c语言实现的带通配符匹配算法
- 浅析STL中的常用算法
- 算法之排列算法与组合算法详解
- C++实现一维向量旋转算法
- Ruby实现的合并排序算法
- C#折半插入排序算法实现方法
- 基于C++实现的各种内部排序算法汇总
- C++线性时间的排序算法分析
- C++实现汉诺塔算法经典实例
- PHP实现克鲁斯卡尔算法实例解析