基于ROS_Arduino室内移动机器人SLAM实验测试
2015-12-21 15:26
344 查看
纯手工搭建的机器人,因此外观并不美。
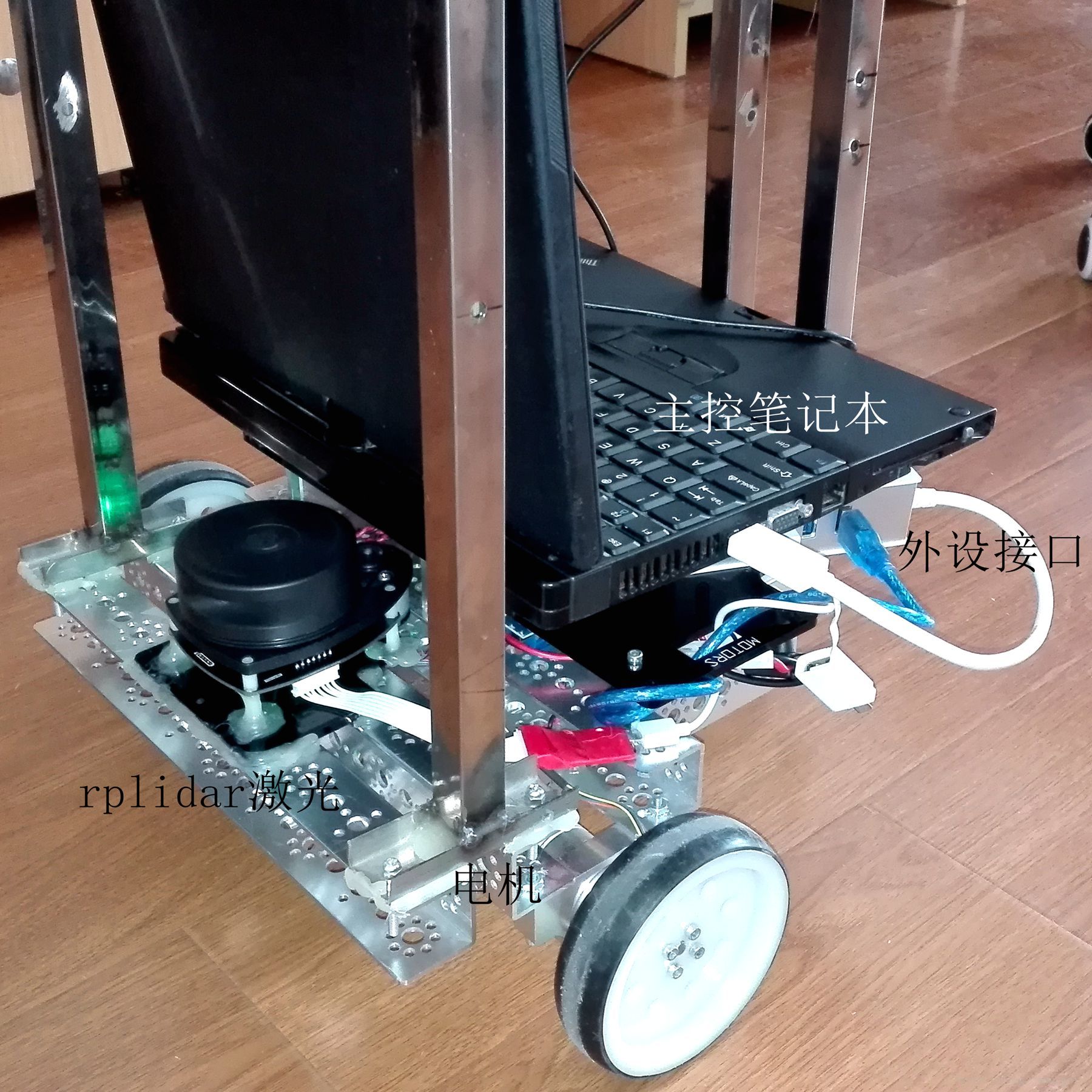
基于ROS(indigo)以及Arduino等搭建软硬件平台,包括语音、视觉、激光、码盘等传感器设备。
整体如下图所示:

底盘特写:

语音输入:

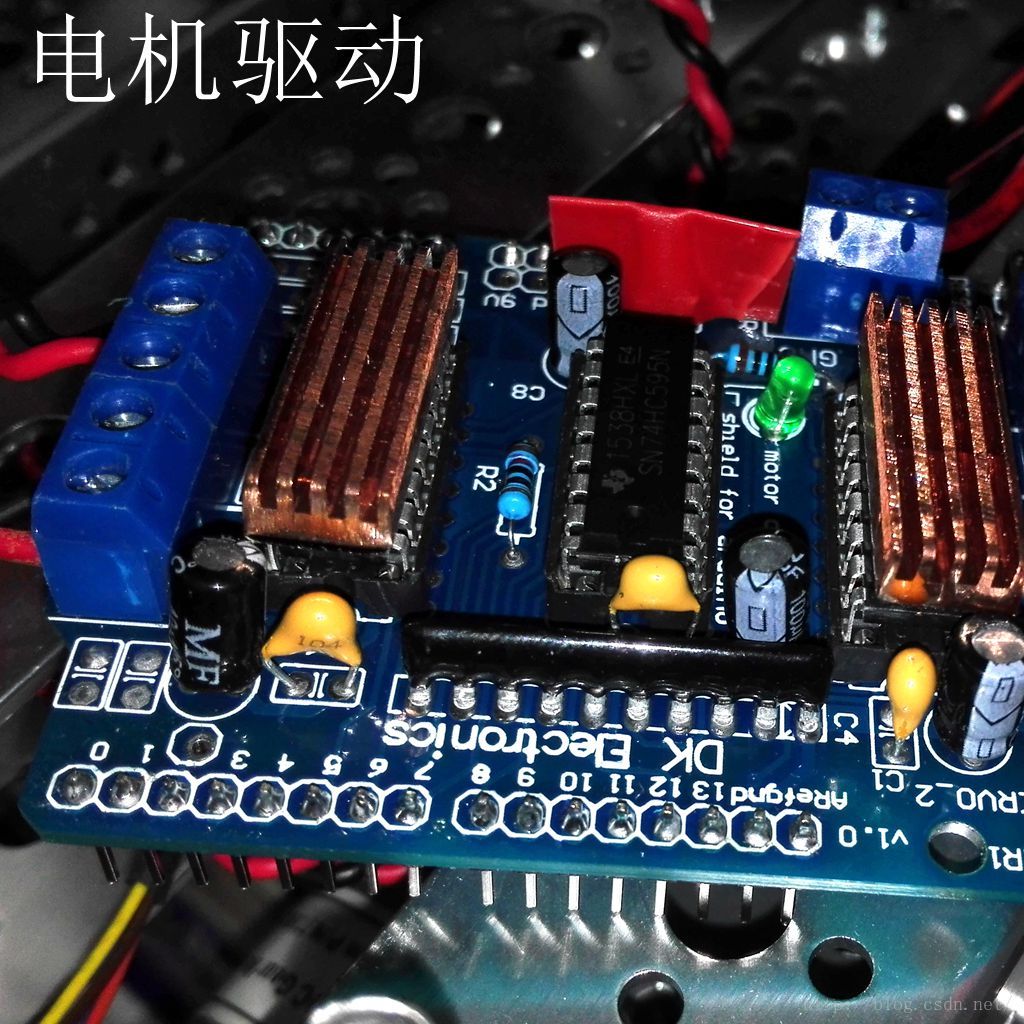
Arduino模块:

机器人主控:

各子功能测试,见之前博客内容。
子功能测试完成后,进行第一次功能组合测试,具体实验录像可见视频。
实验视频,点击
http://v.youku.com/v_show/id_XMTQxOTczMDY0MA
基于ROS(indigo)以及Arduino等搭建软硬件平台,包括语音、视觉、激光、码盘等传感器设备。
整体如下图所示:
底盘特写:
语音输入:
Arduino模块:
机器人主控:
各子功能测试,见之前博客内容。
子功能测试完成后,进行第一次功能组合测试,具体实验录像可见视频。
实验视频,点击
http://v.youku.com/v_show/id_XMTQxOTczMDY0MA

相关文章推荐
- 基于ROS_Arduino室内移动机器人SLAM实验测试
- 基于ROS_Arduino室内移动机器人SLAM实验测试
- 【PHP】PHP include()和require()方法的区别
- ios图片缩放,根据UIImageView Frame的尺寸,自动调整UIImage缩放,保证图片显示不变形
- UIMenuContnroller的使用
- Android BlueDroid(一):BlueDroid概述
- Hello : break continue return
- IOS开发之 ---- iOS8中提示框的使用UIAlertController(UIAlertView和UIActionSheet二合一)
- Ant_build.xml解释
- iOS开发日记53-CALayer和UIView
- 报错:finished with non-zero exit value 2
- android 蓝牙 bluetooth OPP文件传输
- ng-ui-router 官方示例的解读
- 简单易用的交互设计工具:摩客串串Chinco
- [leetcode] 52. N-Queens II 解题报告
- iOS隐藏UITableView下面多余的tableView的线条
- iOS UILable自动适应的写法
- iOS开发技巧 UIRefreshControl下拉刷新
- 使用NSOperation与NSOperationQueue实现多线程
- UICollectView Item间隔调整