LSTM与GRU的一些比较--论文笔记
2015-10-01 13:29
288 查看
reference:Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling



1.概要:
传统的RNN在训练long-term dependencies 的时候会遇到很多困难,最常见的便是vanish gradient problen。期间有很多种解决这个问题的方法被发表。大致可以分为两类:一类是以新的方法改善或者代替传统的SGD方法,如Bengio提出的clip gradient;另一种则是设计更加精密的recurrent unit,如LSTM,GRU。而本文的重点是比较LSTM,GRU的performance。由于在machine translation上这两种unit的performance已经得到验证(效果差别不明显,performance差别不大),本文是在music datasets和speech signal modeling上进行实验的。
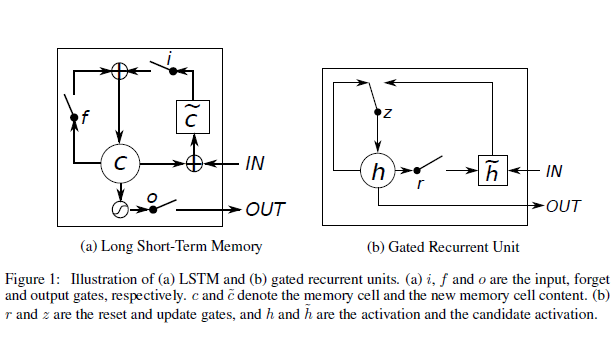
2.LSTM与GRU:
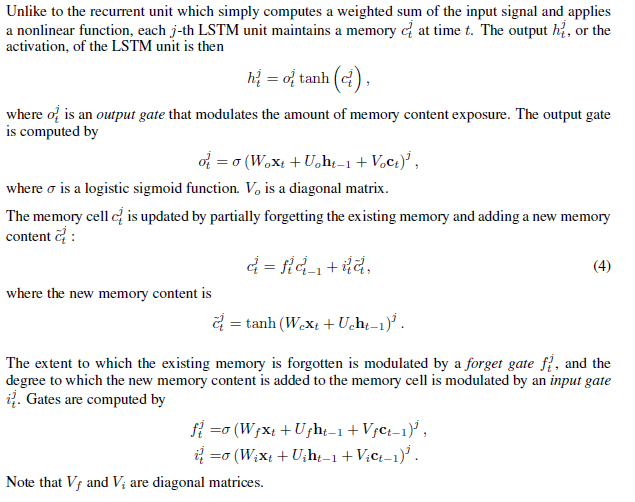
1) LSTM:
2)GRU:
3)概括的来说,LSTM和GRU都能通过各种Gate将重要特征保留,保证其在long-term 传播的时候也不会被丢失;还有一个不太好理解,作用就是有利于BP的时候不容易vanishing:
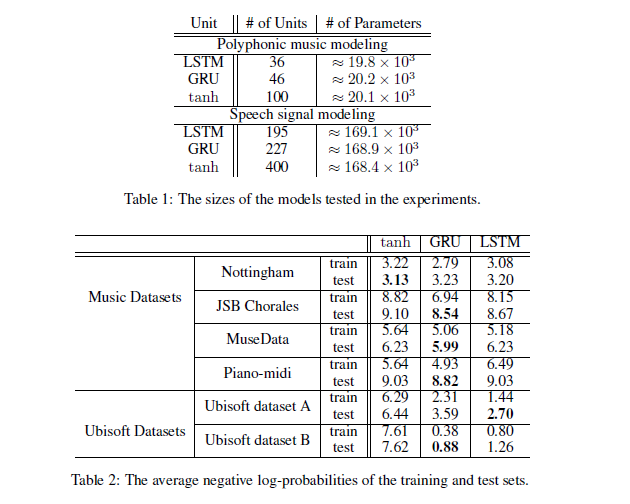
3.实验结果:
实验用了三个unit,传统的tanh,以及LSTM和GRU:
可以发现LSTM和GRU的差别并不大,但是都比tanh要明显好很多,所以在选择LSTM或者GRU的时候还要看具体的task data是什么
不过在收敛时间和需要的epoch上,GRU应该要更胜一筹:
4.代码(keras):
1)LSTM:
class LSTM(Recurrent): ''' Acts as a spatiotemporal projection, turning a sequence of vectors into a single vector. Eats inputs with shape: (nb_samples, max_sample_length (samples shorter than this are padded with zeros at the end), input_dim) and returns outputs with shape: if not return_sequences: (nb_samples, output_dim) if return_sequences: (nb_samples, max_sample_length, output_dim) For a step-by-step description of the algorithm, see: http://deeplearning.net/tutorial/lstm.html References: Long short-term memory (original 97 paper) http://deeplearning.cs.cmu.edu/pdfs/Hochreiter97_lstm.pdf Learning to forget: Continual prediction with LSTM http://www.mitpressjournals.org/doi/pdf/10.1162/089976600300015015 Supervised sequence labelling with recurrent neural networks http://www.cs.toronto.edu/~graves/preprint.pdf ''' def __init__(self, input_dim, output_dim=128, init='glorot_uniform', inner_init='orthogonal', forget_bias_init='one', activation='tanh', inner_activation='hard_sigmoid', weights=None, truncate_gradient=-1, return_sequences=False): super(LSTM, self).__init__() self.input_dim = input_dim self.output_dim = output_dim self.truncate_gradient = truncate_gradient self.return_sequences = return_sequences self.init = initializations.get(init) self.inner_init = initializations.get(inner_init) self.forget_bias_init = initializations.get(forget_bias_init) self.activation = activations.get(activation) self.inner_activation = activations.get(inner_activation) self.input = T.tensor3() self.W_i = self.init((self.input_dim, self.output_dim)) self.U_i = self.inner_init((self.output_dim, self.output_dim)) self.b_i = shared_zeros((self.output_dim)) self.W_f = self.init((self.input_dim, self.output_dim)) self.U_f = self.inner_init((self.output_dim, self.output_dim)) self.b_f = self.forget_bias_init((self.output_dim)) self.W_c = self.init((self.input_dim, self.output_dim)) self.U_c = self.inner_init((self.output_dim, self.output_dim)) self.b_c = shared_zeros((self.output_dim)) self.W_o = self.init((self.input_dim, self.output_dim)) self.U_o = self.inner_init((self.output_dim, self.output_dim)) self.b_o = shared_zeros((self.output_dim)) self.params = [ self.W_i, self.U_i, self.b_i, self.W_c, self.U_c, self.b_c, self.W_f, self.U_f, self.b_f, self.W_o, self.U_o, self.b_o, ] if weights is not None: self.set_weights(weights) def _step(self, xi_t, xf_t, xo_t, xc_t, mask_tm1, h_tm1, c_tm1, u_i, u_f, u_o, u_c): h_mask_tm1 = mask_tm1 * h_tm1 c_mask_tm1 = mask_tm1 * c_tm1 i_t = self.inner_activation(xi_t + T.dot(h_mask_tm1, u_i)) f_t = self.inner_activation(xf_t + T.dot(h_mask_tm1, u_f)) c_t = f_t * c_mask_tm1 + i_t * self.activation(xc_t + T.dot(h_mask_tm1, u_c)) o_t = self.inner_activation(xo_t + T.dot(h_mask_tm1, u_o)) h_t = o_t * self.activation(c_t) return h_t, c_t def get_output(self, train=False): X = self.get_input(train) padded_mask = self.get_padded_shuffled_mask(train, X, pad=1) X = X.dimshuffle((1, 0, 2)) xi = T.dot(X, self.W_i) + self.b_i xf = T.dot(X, self.W_f) + self.b_f xc = T.dot(X, self.W_c) + self.b_c xo = T.dot(X, self.W_o) + self.b_o [outputs, memories], updates = theano.scan( self._step, sequences=[xi, xf, xo, xc, padded_mask], outputs_info=[ T.unbroadcast(alloc_zeros_matrix(X.shape[1], self.output_dim), 1), T.unbroadcast(alloc_zeros_matrix(X.shape[1], self.output_dim), 1) ], non_sequences=[self.U_i, self.U_f, self.U_o, self.U_c], truncate_gradient=self.truncate_gradient) if self.return_sequences: return outputs.dimshuffle((1, 0, 2)) return outputs[-1] def get_config(self): return {"name": self.__class__.__name__, "input_dim": self.input_dim, "output_dim": self.output_dim, "init": self.init.__name__, "inner_init": self.inner_init.__name__, "forget_bias_init": self.forget_bias_init.__name__, "activation": self.activation.__name__, "inner_activation": self.inner_activation.__name__, "truncate_gradient": self.truncate_gradient, "return_sequences": self.return_sequences}
2)GRU:
class GRU(Recurrent): ''' Gated Recurrent Unit - Cho et al. 2014 Acts as a spatiotemporal projection, turning a sequence of vectors into a single vector. Eats inputs with shape: (nb_samples, max_sample_length (samples shorter than this are padded with zeros at the end), input_dim) and returns outputs with shape: if not return_sequences: (nb_samples, output_dim) if return_sequences: (nb_samples, max_sample_length, output_dim) References: On the Properties of Neural Machine Translation: Encoder–Decoder Approaches http://www.aclweb.org/anthology/W14-4012 Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling http://arxiv.org/pdf/1412.3555v1.pdf ''' def __init__(self, input_dim, output_dim=128, init='glorot_uniform', inner_init='orthogonal', activation='sigmoid', inner_activation='hard_sigmoid', weights=None, truncate_gradient=-1, return_sequences=False): super(GRU, self).__init__() self.input_dim = input_dim self.output_dim = output_dim self.truncate_gradient = truncate_gradient self.return_sequences = return_sequences self.init = initializations.get(init) self.inner_init = initializations.get(inner_init) self.activation = activations.get(activation) self.inner_activation = activations.get(inner_activation) self.input = T.tensor3() self.W_z = self.init((self.input_dim, self.output_dim)) self.U_z = self.inner_init((self.output_dim, self.output_dim)) self.b_z = shared_zeros((self.output_dim)) self.W_r = self.init((self.input_dim, self.output_dim)) self.U_r = self.inner_init((self.output_dim, self.output_dim)) self.b_r = shared_zeros((self.output_dim)) self.W_h = self.init((self.input_dim, self.output_dim)) self.U_h = self.inner_init((self.output_dim, self.output_dim)) self.b_h = shared_zeros((self.output_dim)) self.params = [ self.W_z, self.U_z, self.b_z, self.W_r, self.U_r, self.b_r, self.W_h, self.U_h, self.b_h, ] if weights is not None: self.set_weights(weights) def _step(self, xz_t, xr_t, xh_t, mask_tm1, h_tm1, u_z, u_r, u_h): h_mask_tm1 = mask_tm1 * h_tm1 z = self.inner_activation(xz_t + T.dot(h_mask_tm1, u_z)) r = self.inner_activation(xr_t + T.dot(h_mask_tm1, u_r)) hh_t = self.activation(xh_t + T.dot(r * h_mask_tm1, u_h)) h_t = z * h_mask_tm1 + (1 - z) * hh_t return h_t def get_output(self, train=False): X = self.get_input(train) padded_mask = self.get_padded_shuffled_mask(train, X, pad=1) X = X.dimshuffle((1, 0, 2)) x_z = T.dot(X, self.W_z) + self.b_z x_r = T.dot(X, self.W_r) + self.b_r x_h = T.dot(X, self.W_h) + self.b_h outputs, updates = theano.scan( self._step, sequences=[x_z, x_r, x_h, padded_mask], outputs_info=T.unbroadcast(alloc_zeros_matrix(X.shape[1], self.output_dim), 1), non_sequences=[self.U_z, self.U_r, self.U_h], truncate_gradient=self.truncate_gradient) if self.return_sequences: return outputs.dimshuffle((1, 0, 2)) return outputs[-1] def get_config(self): return {"name": self.__class__.__name__, "input_dim": self.input_dim, "output_dim": self.output_dim, "init": self.init.__name__, "inner_init": self.inner_init.__name__, "activation": self.activation.__name__, "inner_activation": self.inner_activation.__name__, "truncate_gradient": self.truncate_gradient, "return_sequences": self.return_sequences}

相关文章推荐
- 图像识别和图像搜索
- 卷积神经网络
- 深度学习札记
- 图像智能打标签‘神器’-AlchemyVision API
- ubuntu theano 安装成功,windows theano安装失败
- 卷积神经网络知识要点
- 1.linear Regression
- 1.linear Regression
- SURF项目总结 - deepdream
- Deep learning: autoencoders and sparsity
- 开设博客初衷
- deep learning 个人理解及其实现工具
- 从CVPR2013看计算机视觉研究的三个趋势
- DL相关文献整理
- ImageNet Classification with Deep Convolutional Neural Networks 阅读理解及问题
- Exercise:Convolution and Pooling 代码示例
- Exercise:Learning color features with Sparse Autoencoders 代码示例
- Exercise: Implement deep networks for digit classification 代码示例
- Exercise:Softmax Regression 代码示例