OpenCV 2.4.8组件结构全解析
2015-08-25 14:45
363 查看
至于OpenCV组件结构的研究方法,我们不妨管中窥豹,通过opencv安装路径下include目录里面头文件的分类存放,来一窥OpenCV这些年迅猛发展起来的庞杂组件架构。
我们进入到D:\ProgramFiles\opencv\build\include目录,可以看到有opencv和opencv2这两个文件夹。显然,opencv这个文件夹里面包含着旧版的头文件。而opencv2这个文件夹里面包含着具有时代意义的新版OpenCV2系列的头文件。

在opencv这个文件夹里面,也就是D:\Program Files\opencv\build\include\opencv目录下,可以看到如下的各种头文件。这里面大概就是opencv 1.0最核心的,而且保留下来的内容的头文件,可以把它们整体理解为一个组件。
再来看看我们重点关注的opencv2这边,在D:\ProgramFiles\opencv\build\include\opencv2目录下,我们可以看到这些文件夹:
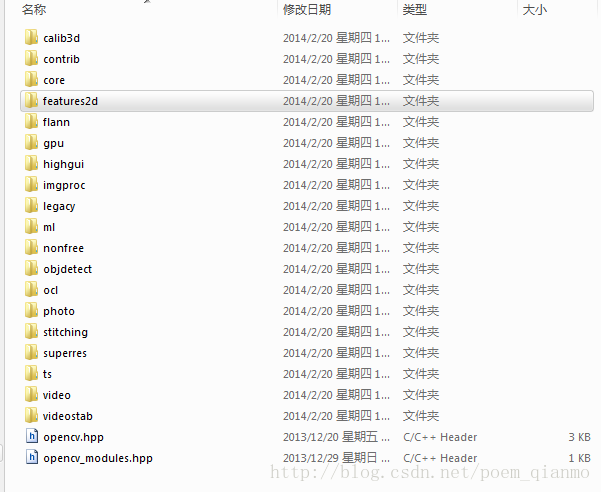
我们灵机一动,发现下面有个叫opencv_modules.hpp的hpp文件,一看就知道里面存放的是opencv2中的新模块构造相关的说明代码,打开一看,果不其然,定义的是OpenCV2所有组件的宏:
/*
* ** File generated automatically, do not modify **
*
*This file defines the list of modules available in current build configuration
*
*
*/
#define HAVE_OPENCV_CALIB3D
#define HAVE_OPENCV_CONTRIB
#define HAVE_OPENCV_CORE
#define HAVE_OPENCV_FEATURES2D
#define HAVE_OPENCV_FLANN
#define HAVE_OPENCV_GPU
#define HAVE_OPENCV_HIGHGUI
#define HAVE_OPENCV_IMGPROC
#define HAVE_OPENCV_LEGACY
#define HAVE_OPENCV_ML
#define HAVE_OPENCV_NONFREE
#define HAVE_OPENCV_OBJDETECT
#define HAVE_OPENCV_OCL
#define HAVE_OPENCV_PHOTO
#define HAVE_OPENCV_STITCHING
#define HAVE_OPENCV_SUPERRES
#define HAVE_OPENCV_TS
#define HAVE_OPENCV_VIDEO
#define HAVE_OPENCV_VIDEOSTAB
OK,就不多客套了,下面就是OpenCV的所有模块介绍,按照顺序来:
【calib3d】——其实就是就是Calibration(校准)加3D这两个词的组合缩写。这个模块主要是相机校准和三维重建相关的内容。基本的多视角几何算法,单个立体摄像头标定,物体姿态估计,立体相似性算法,3D信息的重建等等。
【contrib】——也就是Contributed/Experimental Stuf的缩写, 该模块包含了一些最近添加的不太稳定的可选功能,不用去多管。2.4.8里的这个模块有新型人脸识别,立体匹配,人工视网膜模型等技术。
【core】——核心功能模块,包含如下内容:
动态数据结构
绘图函数
数组操作相关函数
辅助功能与系统函数和宏
与OpenGL的互操作
图像的几何变换
其它(Miscellaneous)图像转换
直方图相关
结构分析和形状描述
运动分析和对象跟踪
特征检测
目标检测等内容
【features2d】 ——也就是Features2D, 2D功能框架
,包含如下内容:
特征检测和描述
特征检测器(Feature Detectors)通用接口
描述符提取器(Descriptor Extractors)通用接口
描述符匹配器(Descriptor Matchers)通用接口
通用描述符(Generic Descriptor)匹配器通用接口
关键点绘制函数和匹配功能绘制函数
Nearest Neighbors,高维的近似近邻快速搜索算法库,包含两个部分:
聚类
【highgui】——也就是high gui,高层GUI图形用户界面,包含媒体的I
/ O输入输出,视频捕捉、图像和视频的编码解码、图形交互界面的接口等内容
【legacy】——一些已经废弃的代码库,保留下来作为向下兼容,包含如下相关的内容:
运动分析
期望最大化
直方图
平面细分(C API)
特征检测和描述(Feature Detection and Description)
描述符提取器(Descriptor Extractors)的通用接口
通用描述符(Generic Descriptor Matchers)的常用接口
匹配器
【ml】——Machine Learning,机器学习模块, 基本上是统计模型和分类算法,包含如下内容:
一般贝叶斯分类器 (Normal Bayes Classifier)
K-近邻 (K-NearestNeighbors)
支持向量机 (Support Vector Machines)
决策树 (Decision Trees)
提升(Boosting)
梯度提高树(Gradient Boosted Trees)
随机树 (Random Trees)
超随机树 (Extremely randomized trees)
期望最大化 (Expectation Maximization)
神经网络 (Neural Networks)
MLData
【objdetect】——目标检测模块,包含Cascade
Classification(级联分类)和Latent SVM这两个部分。
【ocl】——即OpenCL-accelerated Computer
Vision,运用OpenCL加速的计算机视觉组件模块
【photo】——也就是Computational Photography,包含图像修复和图像去噪两部分
【stitching】——images stitching,图像拼接模块,包含如下部分:
特点寻找和匹配图像
估计旋转
自动校准
图片歪斜
接缝估测
曝光补偿
图片混合
【ts】——opencv测试相关代码,不用去管他
【video】——视频分析组件,该模块包括运动估计,背景分离,对象跟踪等视频处理相关内容。
【Videostab】——Video stabilization,视频稳定相关的组件,官方文档中没有多作介绍,不管它了。
看到到这里,相信大家已经对OpenCV的模块架构设计有了一定的认识。
OpenCV其实就是这么多模块作为代码容器组合起来的一个SDK而已,没什么稀奇的,对吧。

相关文章推荐
- centos单机安装Spark1.4.0
- OPENCV VS设置
- Tomcat启用SSL导致Firefox出现“安全连接失败”错误的解决方法
- Docker 1.8.0增加Content Trust,容器安全性提升
- shell脚本实现将文件中的几行输出合并成一行显示
- OpenGL开发资料黄页
- shell脚本实现将文件中的几行输出合并成一行显示
- Linux环境下iscsi initiator的应用
- 批量添加ip后没有生效出现了什么问题?
- 【linux】ubuntu下navicat for mysql安装
- 直接双击启动tomcat中的startup.bat闪退原因及解决方法
- vmware:Cannot open the disk 'XXX' or one of the snapshot disks it depends on.
- Vmware私有云虚拟机(CentOS 6.5 OS)之根分区扩容
- 使用Eclipse自带的Maven插件创建Web项目时报错:Could not resolve archetype org.apache.maven.archetypes:maven-archetyp
- drop,truncate,delete 区别
- 第一个shell 脚本
- Linux find命令之exec
- nginx缓存配置和ngx_cache_purge总结
- 发现 网站错误
- tomcat远程调试