Android Sensor 架构深入剖析
2014-07-25 14:50
375 查看
1、Android sensor架构
Android4.0系统内置对传感器的支持达13种,它们分别是:加速度传感器(accelerometer)、磁力传感器(magnetic field)、方向传感器(orientation)、陀螺仪(gyroscope)、环境光照传感器(light)、压力传感器(pressure)、温度传感器(temperature)和距离传感器(proximity)等。
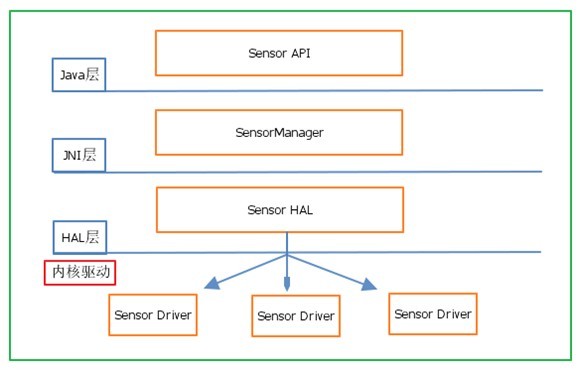
Android实现传感器系统包括以下几个部分:
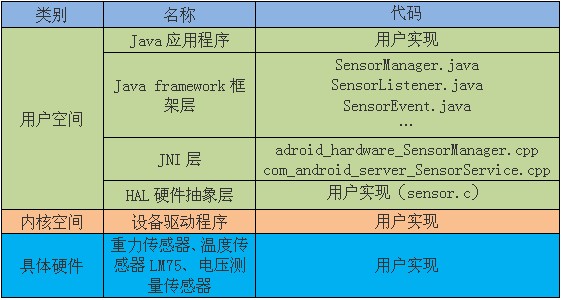
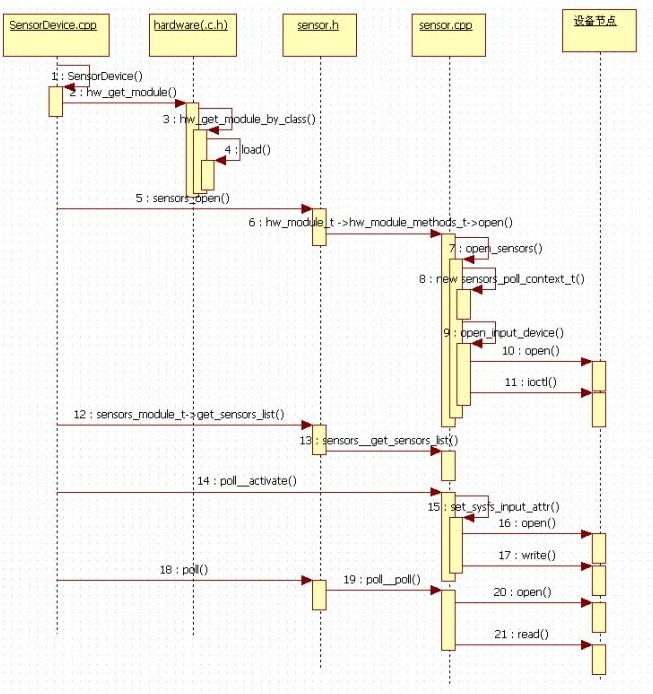
各部分之间架构图如下:
2、Sensor HAL层接口
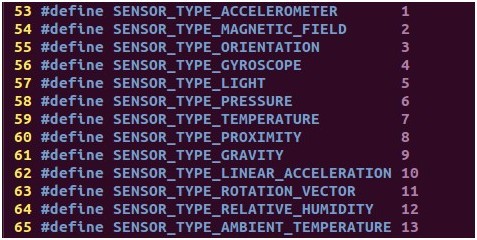
Google为Sensor提供了统一的HAL接口,不同的硬件厂商需要根据该接口来实现并完成具体的硬件抽象层,Android中Sensor的HAL接口定义在:hardware/libhardware/include/hardware/sensors.h
对传感器类型的定义:
传感器模块的定义结构体如下:
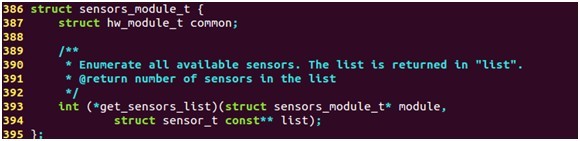
该接口的定义实际上是对标准的硬件模块hw_module_t的一个扩展,增加了一个get_sensors_list函数,用于获取传感器的列表。
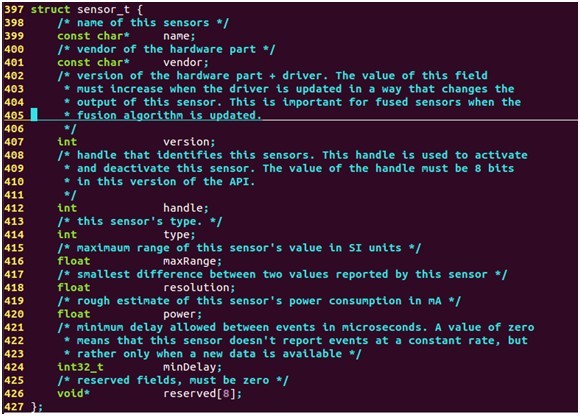
对任意一个sensor设备都会有一个sensor_t结构体,其定义如下:
每个传感器的数据由sensors_event_t结构体表示,定义如下:
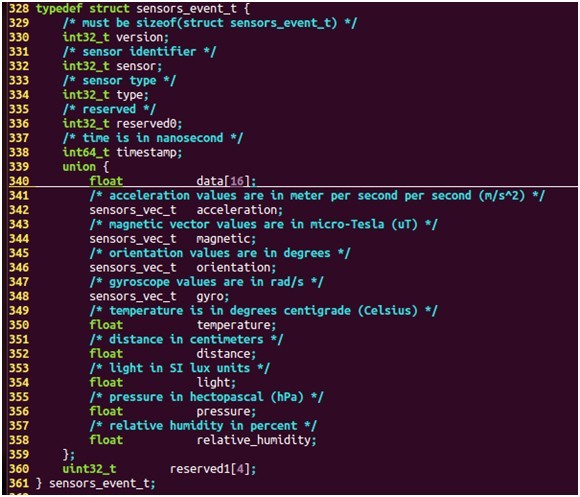
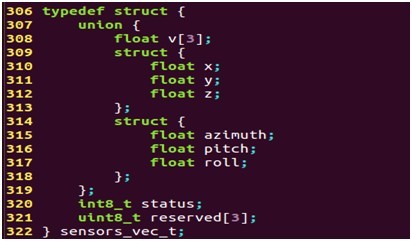
其中,sensor为传感器的标志符,而不同的传感器则采用union方式来表示,sensors_vec_t结构体用来表示不同传感器的数据,sensors_vec_t定义如下:
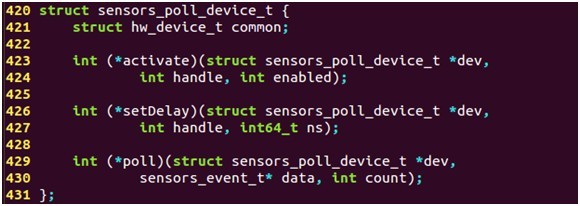
Sensor设备结构体sensors_poll_device_t,对标准硬件设备hw_device_t结构体的扩展,主要完成读取底层数据,并将数据存储在struct sensors_poll_device_t结构体中,poll函数用来获取底层数据,调用时将被阻塞定义如下:
控制设备打开/关闭结构体定义如下:
3、Sensor HAL实现(以LM75温度传感器为例子)
(1)打开设备流程图
(2)实现代码分析
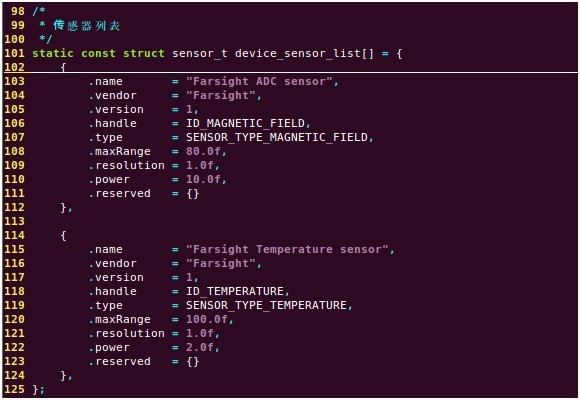
在代码中含有两个传感器ADC电位器和LM75温度传感器,所以在sensor.c中,首先需要定义传感器数组device_sensor_list[],其实就是初始化struct sensor_t结构体,初始化如下:
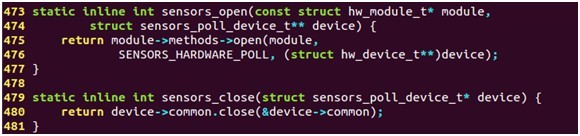
定义open_sensors函数,来打开Sensor模块,代码如下:
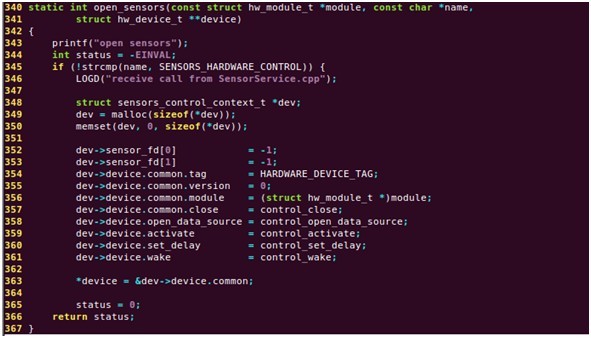
在这个方法中,首先需要为hw_device_t分配内存空间,并对其初始化,设置重要方法的实现。
control_open_data_source()打开传感器并使能设备:

调用sensor__data_poll方法读取数据:
/*轮询读取数据*/
static int sensors__data_poll(struct sensors_data_context_t *dev, sensors_data_t * values)
{
int n;
int mag;
float temp;
char buf[10];
while (1) {
if(count % 3 == 2) // 读取ADC值
{
if( read(dev->event_fd[0], &mag, sizeof(mag)) < 0)
{
LOGE("read adc error");
}else{
dev->sensors[ID_MAGNETIC_FIELD].magnetic.v[0] =(float)mag;
LOGE("read adc %f\n",(float)mag);
*values = dev->sensors[ID_MAGNETIC_FIELD];
values->sensor = ID_MAGNETIC_FIELD;
count++;
}
usleep(500000);
return ID_MAGNETIC_FIELD;
}
else if(count%3 == 1) //读取温度传感器值
{
memset(buf, 0 ,sizeof(buf));
if((n = read(dev->event_fd[1], buf, 10)) < 0)
{
LOGE("read temp error");
}else{
buf[n - 1] = '\0';
temp =(float) (atoi(buf) / 1000);
dev->sensors[ID_TEMPERATURE].temperature = temp;
LOGE("read temp %f\n",temp);
*values = dev->sensors[ID_TEMPERATURE];
values->sensor = ID_TEMPERATURE;
count++;
}
close(dev->event_fd[1]);
dev->event_fd[1]= open("/sys/bus/i2c/devices/0-0048/temp1_input", O_RDONLY);
usleep(500000);
return ID_TEMPERATURE;
}
else if(count%3 == 0) //读取方向传感器模拟值
{
LOGI("read orientation\n");
/* fill up data of orientation */
dev->sensors[ID_ORIENTATION].orientation.azimuth = x + 5;
dev->sensors[ID_ORIENTATION].orientation.pitch = y + 5;
dev->sensors[ID_ORIENTATION].orientation.roll = z + 5;
*values = dev->sensors[ID_ORIENTATION];
values->sensor = ID_ORIENTATION;
count++;
x += 0.0001; y += 0.0001; z += 0.0001;
usleep (500000);
return ID_ORIENTATION;
}
}
}
Android4.0系统内置对传感器的支持达13种,它们分别是:加速度传感器(accelerometer)、磁力传感器(magnetic field)、方向传感器(orientation)、陀螺仪(gyroscope)、环境光照传感器(light)、压力传感器(pressure)、温度传感器(temperature)和距离传感器(proximity)等。
Android实现传感器系统包括以下几个部分:
各部分之间架构图如下:
2、Sensor HAL层接口
Google为Sensor提供了统一的HAL接口,不同的硬件厂商需要根据该接口来实现并完成具体的硬件抽象层,Android中Sensor的HAL接口定义在:hardware/libhardware/include/hardware/sensors.h
对传感器类型的定义:
传感器模块的定义结构体如下:
该接口的定义实际上是对标准的硬件模块hw_module_t的一个扩展,增加了一个get_sensors_list函数,用于获取传感器的列表。
对任意一个sensor设备都会有一个sensor_t结构体,其定义如下:
每个传感器的数据由sensors_event_t结构体表示,定义如下:
其中,sensor为传感器的标志符,而不同的传感器则采用union方式来表示,sensors_vec_t结构体用来表示不同传感器的数据,sensors_vec_t定义如下:
Sensor设备结构体sensors_poll_device_t,对标准硬件设备hw_device_t结构体的扩展,主要完成读取底层数据,并将数据存储在struct sensors_poll_device_t结构体中,poll函数用来获取底层数据,调用时将被阻塞定义如下:
控制设备打开/关闭结构体定义如下:
3、Sensor HAL实现(以LM75温度传感器为例子)
(1)打开设备流程图
(2)实现代码分析
在代码中含有两个传感器ADC电位器和LM75温度传感器,所以在sensor.c中,首先需要定义传感器数组device_sensor_list[],其实就是初始化struct sensor_t结构体,初始化如下:
定义open_sensors函数,来打开Sensor模块,代码如下:
在这个方法中,首先需要为hw_device_t分配内存空间,并对其初始化,设置重要方法的实现。
control_open_data_source()打开传感器并使能设备:
调用sensor__data_poll方法读取数据:
/*轮询读取数据*/
static int sensors__data_poll(struct sensors_data_context_t *dev, sensors_data_t * values)
{
int n;
int mag;
float temp;
char buf[10];
while (1) {
if(count % 3 == 2) // 读取ADC值
{
if( read(dev->event_fd[0], &mag, sizeof(mag)) < 0)
{
LOGE("read adc error");
}else{
dev->sensors[ID_MAGNETIC_FIELD].magnetic.v[0] =(float)mag;
LOGE("read adc %f\n",(float)mag);
*values = dev->sensors[ID_MAGNETIC_FIELD];
values->sensor = ID_MAGNETIC_FIELD;
count++;
}
usleep(500000);
return ID_MAGNETIC_FIELD;
}
else if(count%3 == 1) //读取温度传感器值
{
memset(buf, 0 ,sizeof(buf));
if((n = read(dev->event_fd[1], buf, 10)) < 0)
{
LOGE("read temp error");
}else{
buf[n - 1] = '\0';
temp =(float) (atoi(buf) / 1000);
dev->sensors[ID_TEMPERATURE].temperature = temp;
LOGE("read temp %f\n",temp);
*values = dev->sensors[ID_TEMPERATURE];
values->sensor = ID_TEMPERATURE;
count++;
}
close(dev->event_fd[1]);
dev->event_fd[1]= open("/sys/bus/i2c/devices/0-0048/temp1_input", O_RDONLY);
usleep(500000);
return ID_TEMPERATURE;
}
else if(count%3 == 0) //读取方向传感器模拟值
{
LOGI("read orientation\n");
/* fill up data of orientation */
dev->sensors[ID_ORIENTATION].orientation.azimuth = x + 5;
dev->sensors[ID_ORIENTATION].orientation.pitch = y + 5;
dev->sensors[ID_ORIENTATION].orientation.roll = z + 5;
*values = dev->sensors[ID_ORIENTATION];
values->sensor = ID_ORIENTATION;
count++;
x += 0.0001; y += 0.0001; z += 0.0001;
usleep (500000);
return ID_ORIENTATION;
}
}
}

相关文章推荐
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析(转载)
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析
- Android Sensor 架构深入剖析
- 深入Android 【二】 —— 架构和学习 推荐
- 深入Android 【二】 —— 架构和学习
- 深入剖析Spring Web源码(十一) - 处理器映射,处理器适配器以及处理器的实现 - 处理器映射的实现架构
- 深入Android 【二】 —— 架构和学习
- 娃娃鸭深入核心VCL架构剖析(李维)笔记
- 深入剖析Spring Web源码(十五) - 处理器映射,处理器适配器以及处理器的实现 - 处理器的实现架构 - HTTP请求处理器
- 娃娃鸭深入核心VCL架构剖析(李维)笔记
- 娃娃鸭深入核心VCL架构剖析(李维)笔记
- 深入剖析Spring Web源码(十三) - 处理器映射,处理器适配器以及处理器的实现 - 处理器的实现架构 - 简单控制器