Android的Camera架构介绍
2014-05-26 10:16
375 查看
Thanks hanchao3c for sharing the article!
以开源的Android为例,Camera的代码主要在以下的目录中:
Camera的J***A程序的路径:
packages/apps/Camera/src/com/android/camera/
在其中Camera.java是主要实现的文件
Camera的J***A本地调用部分(JNI):
frameworks/base/core/jni/android_hardware_Camera.cpp
这部分内容编译成为目标是libandroid_runtime.so
主要的头文件在以下的目录中:
frameworks/base/include/ui/
Camera底层库在以下的目录中:
frameworks/base/libs/ui/
这部分的内容被编译成库libui.so。
Camera服务部分:
frameworks/base/camera/libcameraservice/
这部分内容被编译成库libcameraservice.so。
为了实现一个具体功能的Camera,在最底层还需要一个硬件相关的Camera库(例如通过调用video for linux驱动程序和Jpeg编码程序实现)。这个库将被Camera的服务库libcameraservice.so调用。
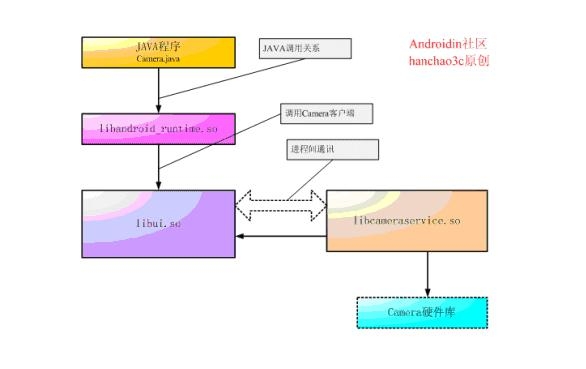
在 Camera系统的各个库中,libui.so位于核心的位置,它对上层的提供的接口主要是Camera类,类 libandroid_runtime.so通过调用Camera类提供对J***A的接口,并且实现了android.hardware.camera 类。 libcameraservice.so是Camera的服务器程序,它通过继承libui.so的类实现服务器的功能,并且与libui.so中的另外 一部分内容则通过进程间通讯(即Binder机制)的方式进行通讯。
libandroid_runtime.so和libui.so两个库是公用的,其中除了Camera还有其他方面的功能。
Camera部分的头文件在frameworks/base/include/ui/目录中,这个目录是和libmedia.so库源文件的目录frameworks/base/libs/ui/相对应的。
Camera主要的头文件有以下几个:
ICameraClient.h
Camera.h
ICamera.h
ICameraService.h
CameraHardwareInterface.h
在这些头文件中,Camera.h提供了对上层的接口,而其他的几个头文件都是提供一些接口类(即包含了纯虚函数的类),这些接口类必须被实现类继承才能够使用。
整个Camera在运行的时候,可以大致上分成Client和Server两个部分,它们分别在两个进程中运行,它们之间使用Binder机制实现 进程间通讯。这样在客户端调用接口,功能则在服务器中实现,但是在客户端中调用就好像直接调用服务器中的功能,进程间通讯的部分对上层程序不可见。
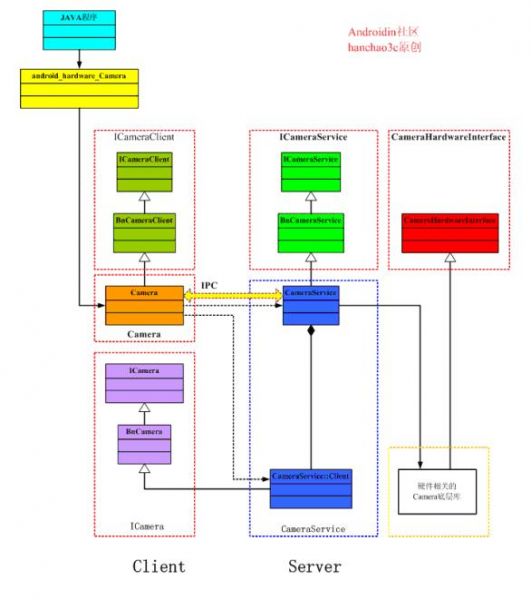
从框架结构上来看,ICameraService.h、ICameraClient.h和ICamera.h三个类定义了MeidaPlayer的 接口和架构,ICameraService.cpp和Camera.cpp两个文件用于Camera架构的实现,Camera的具体功能在下层调用硬件相 关的接口来实现。
从Camera的整体结构上,类Camera是整个系统核心,ICamera类提供了Camera主要功能的接口,在客户端方面调 用,CameraService是Camera服务,它通过调用实际的Camera硬件接口来实现功能。事实上,图中红色虚线框的部分都是Camera程 序的框架部分,它主要利用了Android的系统的Binder机制来完成通讯。蓝色的部分通过调用Camera硬件相关的接口完成具体的Camera服 务功能,其它的部分是为上层的J***A程序提供JNI接口。在整体结构上,左边可以视为一个客户端,右边是一个可以视为服务器,二者通过Android的
Bimder来实现进程间的通讯。
view source
print?
在定义中,ICameraClient 类继承IInterface,并定义了一个Camera客户端的接口,BnCameraClient 继承了BnInterface<ICameraClient>,这是为基于Android的基础类Binder机制实现在进程通讯而构建的。 根据BnInterface类模版的定义BnInterface<ICameraClient>类相当于双继承了BnInterface和 ICameraClient。IcameraClient这个类的主要接口是几个回调函数shutterCallback、rawCallback和
jpegCallback等,它们在相应动作发生的时候被调用。作为Camera的“客户端”,需要自己实现几个回调函数,让服务器程序去“间接地”调用 它们。
view source
print?
从接口中可以看出Camera类刚好实现了一个Camera的基本操作,例如播放(startPreview)、停止(stopPreview)、 暂停(takePicture)等。在Camera类中connect()是一个静态函数,它用于得到一个Camera的实例。在这个类中,具有设置回调 函数的几个函数:setShutterCallback、setRawCallback和setJpegCallback等,这几个函数是为了提供给上层 使用,上层利用这几个设置回调函数,这些回调函数在相应的回调函数中调用,例如使用setShutterCallback设置的回调函数指针被
shutterCallback所调用。
在定义中,ICameraClient 类双继承了IInterface和IBinder:DeathRecipient,并定义了一个Camera客户端的接口,BnCameraClient 继承了BnInterface<ICameraClient>,这是为基于Android的基础类Binder机制实现在进程通讯而构建的。 事实上,根据BnInterface类模版的定义BnInterface<ICameraClient>类相当于双继承了 BnInterface和ICameraClient。这是Android一种常用的定义方式。
继承了DeathNotifier类之后,这样当这个类作为IBinder使用的时候,当这个Binder即将Died的时候被调用其中的binderDied函数。继承这个类基本上实现了一个回调函数的功能。
view source
print?
在camera类中,主要定义Camera的功能接口,这个类必须被继承才能够使用。值得注意的是,这些接口和Camera类的接口有些类似,但是它们并没有直接的关系。事实上,在Camera类的各种实现中,一般都会通过调用ICamera类的实现类来完成。
view source
print?
由于具有纯虚函数, ICameraService 以及BnCameraService必须被继承实现才能够使用,在ICameraService 只定义了一个connect()接口,它的返回值的类型是sp<ICamera>,这个ICamera是提供实现功能的接口。注意,ICameraService只有连接函数connect(),没有断开函数,断开的功能由ICamera接口来提供。
CameraHardwareInterface 定以Camera硬件的接口,如下所示:
view source
print?
使用C语言的方式导出符号:
view source
print?
在程序的其他地方,使用openCameraHardware()就可以得到一个 CameraHardwareInterface,然后调用 CameraHardwareInterface的接口完成Camera的功能。
目录的Camera.java文件中,包含了对Camera的调用
在Camera.java中包含对包的引用:
import android.hardware.Camera.PictureCallback;
import android.hardware.Camera.Size;
在这里定义的Camera类继承了活动Activity类,在它的内部,包含了一个
view source
print?
对Camera功能的一些调用如下所示:
view source
print?
startPreview、stopPreview 和takePicture等接口就是通过J***A本地调用(JNI)来实现的。
frameworks/base/core/java/android/hardware/目录中的Camera.java文件提供了一个J***A类:Camera。
view source
print?
在这个类当中,大部分代码使用JNI调用下层得到,例如:
再者,例如以下代码:
view source
print?
两个setPreviewDisplay参数不同,后一个是本地方法,参数为Surface类型,前一个通过调用后一个实现,但自己的参数以SurfaceHolder为类型。
android_hardware_Camera.cpp之中定义了一个JNINativeMethod(J***A本地调用方法)类型的数组gMethods,如下所示:
view source
print?
JNINativeMethod的第一个成员是一个字符串,表示了J***A本地调用方法的名称,这个名称是在J***A程序中调用的名称;第二个成员也是一个字符串,表示J***A本地调用方法的参数和返回值;第三个成员是J***A本地调用方法对应的C语言函数。
register_android_hardware_Camera函数将gMethods注册为的类”android/media/Camera”,其主要的实现如下所示。
view source
print?
“android/hardware/Camera”对应J***A的类android.hardware.Camera。
3.3 Camera本地库libui.so
frameworks/base/libs/ui/中的Camera.cpp文件用于实现Camera.h提供的接口,其中一个重要的片段如下所示
view source
print?
其中最重要的一点是binder = sm->getService(String16(“media.camera”));;这个调用用来得到一个名称为”media.camera” 的服务,这个调用返回值的类型为IBinder,根据实现将其转换成类型ICameraService使用。
一个函数 connect的实现 如下所示:
view source
print?
connect通过调用getCameraService得到一个 ICameraService,再通过 ICameraService的cs->connect(c)得到一个 ICamera类型的指针。 调用connect将得到一个 Camera的指针,正常情况下Camera的成员 mCamera已经初始化完成。
一个具体的函数startPreview 如下所示:
view source
print?
这些操作可以直接对 mCamera来进行,它是ICamera类型的指针。
其他一些函数的实现也与setDataSource类似。
libmedia.so中的其他一些文件与头文件的名称相同,它们是:
frameworks/base/libs/ui/ICameraClient.cpp
frameworks/base/libs/ui/ICamera.cpp
frameworks/base/libs/ui/ICameraService.cpp
在此处,BnCameraClient和BnCameraService类虽然实现了onTransact()函数,但是由于还有纯虚函数没有实现,因此这个类都是不能实例化的。
ICameraClient.cpp中的BnCameraClient在别的地方也没有实现;而ICameraService.cpp中的BnCameraService类在别的地方被继承并实现,继承者实现了Camera服务的具体功能
在这里的Android.mk文件中,使用宏USE_CAMERA_STUB决定是否使用真的Camera,如果宏为真,则使用 CameraHardwareStub.cpp和FakeCamera.cpp构造一个假的Camera,如果为假则使用 CameraService.cpp构造一个实际上的Camera服务。
CameraService.cpp是继承BnCameraService的实现,在这个类的内部又定义了类Client,CameraService::Client继承了BnCamera。在运作的过程中 CameraService::connect()函数用于得到一个CameraService::Client,在使用过程中,主要是通过调用这个类的 接口来实现完成Camera的功能,由于CameraService::Client本身继承了BnCamera类,而BnCamera类是继承了 ICamera,因此这个类是可以被当成ICamera来使用的。
CameraService和CameraService::Client两个类的结果如下所示:
view source
print?
在CameraService中的一个静态函数instantiate()用于初始化一个Camera服务,寒暑如下所示:
view source
print?
事实上,CameraService::instantiate()这个函数注册了一个名称为”media.camera”的服务,这个服务和Camera.cpp中调用的名称相对应。
Camera整个运作机制是:在Camera.cpp中可以调用ICameraService的接口,这时实际上调用的是 BpCameraService,而BpCameraService又通过Binder机制和BnCameraService实现两个进程的通讯。而 BpCameraService的实现就是这里的CameraService。因此,Camera.cpp虽然是在另外一个进程中运行,但是调用 ICameraService的接口就像直接调用一样,从connect()中可以得到一个ICamera类型的指针,真个指针的实现实际上是
CameraService::Client。
而这些Camera功能的具体实现,就是CameraService::Client所实现的了,其构造函数如下所示:
view source
print?
构造函数中,调用openCameraHardware()得到一个CameraHardwareInterface类型的指针,并作为其成员mHardware。以后对实际的Camera的操作都通过对这个指针进行。这是一个简单的直接调用关系。
事实上,真正的Camera功能己通过实现CameraHardwareInterface类来完成。在这个库当中 CameraHardwareStub.h和CameraHardwareStub.cpp两个文件定义了一个桩模块的接口,在没有Camera硬件的情 况下使用,例如在仿真器的情况下使用的文件就是CameraHardwareStub.cpp和它依赖的文件FakeCamera.cpp。
CameraHardwareStub类的结构如下所示:
view source
print?
在类CameraHardwareStub当中,包含一个线程类PreviewThread,这个线程用于处理PreView,即负责刷新取景器的 内容。实际的Camera硬件接口通常可以通过对v4l2 捕获驱动的调用来实现,同时还需要一个JPEG编码程序将从驱动中取出的数据编码成JPEG文件。
第一部分 Camera概述
Android的Camera包含取景器(viewfinder)和拍摄照片的功能。目前Android发布版的Camera程序虽然功能比较简单,但是其程序的架构分成客户端和服务器两个部分,它们建立在Android的进程间通讯Binder的结构上。以开源的Android为例,Camera的代码主要在以下的目录中:
Camera的J***A程序的路径:
packages/apps/Camera/src/com/android/camera/
在其中Camera.java是主要实现的文件
Camera的J***A本地调用部分(JNI):
frameworks/base/core/jni/android_hardware_Camera.cpp
这部分内容编译成为目标是libandroid_runtime.so
主要的头文件在以下的目录中:
frameworks/base/include/ui/
Camera底层库在以下的目录中:
frameworks/base/libs/ui/
这部分的内容被编译成库libui.so。
Camera服务部分:
frameworks/base/camera/libcameraservice/
这部分内容被编译成库libcameraservice.so。
为了实现一个具体功能的Camera,在最底层还需要一个硬件相关的Camera库(例如通过调用video for linux驱动程序和Jpeg编码程序实现)。这个库将被Camera的服务库libcameraservice.so调用。
第二部分 Camera的接口与架构
2.1 Camera的整体框架图
Camera的各个库之间的结构可以用下图的表示:在 Camera系统的各个库中,libui.so位于核心的位置,它对上层的提供的接口主要是Camera类,类 libandroid_runtime.so通过调用Camera类提供对J***A的接口,并且实现了android.hardware.camera 类。 libcameraservice.so是Camera的服务器程序,它通过继承libui.so的类实现服务器的功能,并且与libui.so中的另外 一部分内容则通过进程间通讯(即Binder机制)的方式进行通讯。
libandroid_runtime.so和libui.so两个库是公用的,其中除了Camera还有其他方面的功能。
Camera部分的头文件在frameworks/base/include/ui/目录中,这个目录是和libmedia.so库源文件的目录frameworks/base/libs/ui/相对应的。
Camera主要的头文件有以下几个:
ICameraClient.h
Camera.h
ICamera.h
ICameraService.h
CameraHardwareInterface.h
在这些头文件中,Camera.h提供了对上层的接口,而其他的几个头文件都是提供一些接口类(即包含了纯虚函数的类),这些接口类必须被实现类继承才能够使用。
整个Camera在运行的时候,可以大致上分成Client和Server两个部分,它们分别在两个进程中运行,它们之间使用Binder机制实现 进程间通讯。这样在客户端调用接口,功能则在服务器中实现,但是在客户端中调用就好像直接调用服务器中的功能,进程间通讯的部分对上层程序不可见。
从框架结构上来看,ICameraService.h、ICameraClient.h和ICamera.h三个类定义了MeidaPlayer的 接口和架构,ICameraService.cpp和Camera.cpp两个文件用于Camera架构的实现,Camera的具体功能在下层调用硬件相 关的接口来实现。
从Camera的整体结构上,类Camera是整个系统核心,ICamera类提供了Camera主要功能的接口,在客户端方面调 用,CameraService是Camera服务,它通过调用实际的Camera硬件接口来实现功能。事实上,图中红色虚线框的部分都是Camera程 序的框架部分,它主要利用了Android的系统的Binder机制来完成通讯。蓝色的部分通过调用Camera硬件相关的接口完成具体的Camera服 务功能,其它的部分是为上层的J***A程序提供JNI接口。在整体结构上,左边可以视为一个客户端,右边是一个可以视为服务器,二者通过Android的
Bimder来实现进程间的通讯。
2.2 头文件ICameraClient.h
ICameraClient.h用于描述一个Camera客户端的接口,定义如下所示:print?
01 | class ICameraClient: public IInterface |
02 | { |
03 | public : |
04 | DECLARE_META_INTERFACE(CameraClient); |
05 | virtual void shutterCallback() = 0; |
06 | virtual void rawCallback( const sp<IMemory>& picture) = 0; |
07 | virtual void jpegCallback( const sp<IMemory>& picture) = 0; |
08 | virtual void frameCallback( const sp<IMemory>& frame) = 0; |
09 | virtual void errorCallback(status_t error) = 0; |
10 | virtual void autoFocusCallback( bool focused) = 0; |
11 | }; |
12 | class BnCameraClient: public BnInterface<ICameraClient> |
13 | { |
14 | public : |
15 | virtual status_tonTransact( uint32_t code, |
16 | const Parcel& data, |
17 | Parcel* reply, |
18 | uint32_t flags = 0); |
19 | }; |
jpegCallback等,它们在相应动作发生的时候被调用。作为Camera的“客户端”,需要自己实现几个回调函数,让服务器程序去“间接地”调用 它们。
2.3 头文件Camera.h
Camera.h是Camera对外的接口头文件,它被实现CameraJNI的文件android_hardware_Camera.cpp所调用。Camera.h最主要是定义了一个Camera类:view source
print?
01 | class Camera: public BnCameraClient, public IBinder::DeathRecipient |
02 | { |
03 | public : |
04 | static sp connect(); |
05 | ~Camera(); |
06 | void disconnect(); |
07 | status_t getStatus() {return mStatus;} |
08 | status_t setPreviewDisplay( const sp& surface); |
09 | status_t startPreview(); |
10 | void stopPreview(); |
11 | status_t autoFocus(); |
12 | status_t takePicture(); |
13 | status_t setParameters( const String8& params); |
14 | String8 getParameters() const ; |
15 | void setShutterCallback(shutter_callback cb, void
|
16 | void setRawCallback(frame_callback cb, void
|
17 | void setJpegCallback(frame_callback cb, void
|
18 | void setFrameCallback(frame_callback cb, void
|
19 | void setErrorCallback(error_callback cb, void
|
20 | void setAutoFocusCallback(autofocus_callback cb, void
|
21 | // ICameraClient interface |
22 | virtual void
|
23 | virtual void rawCallback( const sp& picture); |
24 | virtual void jpegCallback( const sp& picture); |
25 | virtual void frameCallback( const sp& frame); |
26 | virtual void
|
27 | virtual void autoFocusCallback( bool focused); |
28 | //…… |
29 | } |
shutterCallback所调用。
在定义中,ICameraClient 类双继承了IInterface和IBinder:DeathRecipient,并定义了一个Camera客户端的接口,BnCameraClient 继承了BnInterface<ICameraClient>,这是为基于Android的基础类Binder机制实现在进程通讯而构建的。 事实上,根据BnInterface类模版的定义BnInterface<ICameraClient>类相当于双继承了 BnInterface和ICameraClient。这是Android一种常用的定义方式。
继承了DeathNotifier类之后,这样当这个类作为IBinder使用的时候,当这个Binder即将Died的时候被调用其中的binderDied函数。继承这个类基本上实现了一个回调函数的功能。
2.4 头文件ICamera.h
ICamera.h描述的内容是一个实现Camera功能的接口,其定义如下所示:view source
print?
01 | class ICamera: public IInterface |
02 | { |
03 | public : |
04 | DECLARE_META_INTERFACE(Camera); |
05 | virtual void
|
06 | virtual status_t setPreviewDisplay( const sp& surface) = 0; |
07 | virtual void setHasFrameCallback( bool installed) = 0; |
08 | virtual status_t startPreview() = 0; |
09 | virtual void
|
10 | virtual status_t autoFocus() = 0; |
11 | virtual status_t takePicture() = 0; |
12 | virtual status_t setParameters( const String8& params) = 0; |
13 | virtual String8 getParameters() const = 0; |
14 | }; |
15 | class BnCamera: public BnInterface |
16 | { |
17 | public : |
18 | virtual status_t onTransact( uint32_t code, |
19 | const Parcel& data, |
20 | Parcel* reply, |
21 | uint32_t flags = 0); |
22 | }; |
2.5 头文件ICameraService .h
ICameraService.h用于描述一个Camera的服务,定义方式如下所示:view source
print?
01 | class ICameraService : public IInterface |
02 | { |
03 | public : |
04 | DECLARE_META_INTERFACE(CameraService); |
05 | virtual sp connect( const sp& cameraClient) = 0; |
06 | }; |
07 | class BnCameraService: public BnInterface |
08 | { |
09 | public : |
10 | virtual status_tonTransact( uint32_t code, |
11 | const Parcel& data, |
12 | Parcel* reply, |
13 | uint32_t flags = 0); |
14 | }; |
2.6 头文件CameraHardwareInterface.h
CameraHardwareInterface.h定义的是一个Camera底层的接口,这个类的实现者是最终实现Camera的。CameraHardwareInterface 定以Camera硬件的接口,如下所示:
view source
print?
01 | class CameraHardwareInterface : public virtual RefBase { |
02 | public : |
03 | virtual ~CameraHardwareInterface() {} |
04 | virtual sp<IMemoryHeap>getPreviewHeap() const
|
05 | virtual status_t startPreview(preview_callback cb, void * user) = 0; |
06 | virtual voidstopPreview() = 0; |
07 | virtual status_t autoFocus(autofocus_callback, |
08 | void * user) = 0; |
09 | virtual status_t takePicture(shutter_callback, |
10 | raw_callback, |
11 | jpeg_callback, |
12 | void * user) = 0; |
13 | virtual status_t cancelPicture( bool cancel_shutter, |
14 | bool cancel_raw, |
15 | bool cancel_jpeg) = 0; |
16 | virtual status_t setParameters( const CameraParameters& params) = 0; |
17 | virtual CameraParametersgetParameters() const
|
18 | virtual void
|
19 | virtual status_t dump( int fd, const Vector<String16>& args) const = 0; |
20 | }; |
view source
print?
1 | extern "C"
|
第三部分 Camera的主要实现分析
3.1 J***A程序部分
在packages/apps/Camera/src/com/android/camera/目录的Camera.java文件中,包含了对Camera的调用
在Camera.java中包含对包的引用:
import android.hardware.Camera.PictureCallback;
import android.hardware.Camera.Size;
在这里定义的Camera类继承了活动Activity类,在它的内部,包含了一个
view source
print?
1 | android.hardware.Camera |
2 | public class Camera extends Activity implements View.OnClickListener, SurfaceHolder.Callback { |
3 | android.hardware.CameramCameraDevice; |
4 | } |
view source
print?
1 | mCameraDevice.takePicture(mShutterCallback, mRawPictureCallback, mJpegPictureCallback); |
2 | mCameraDevice.startPreview(); |
3 | mCameraDevice.stopPreview(); |
frameworks/base/core/java/android/hardware/目录中的Camera.java文件提供了一个J***A类:Camera。
view source
print?
1 | public class
|
2 | public void setParameters(Parameters params) { |
3 | Log.e(TAG, "setParameters()" ); |
4 | //params.dump(); |
5 | native_setParameters(params.flatten()); |
6 | } |
7 | } |
再者,例如以下代码:
view source
print?
1 | public final void setPreviewDisplay(SurfaceHolder holder) { |
2 | setPreviewDisplay(holder.getSurface()); |
3 | } |
4 | private native final void setPreviewDisplay(Surface surface); |
3.2 Camera的J***A本地调用部分
Camera的J***A本地调用(JNI)部分在frameworks/base/core/jni/目录的android_hardware_Camera.cpp中的文件中实现。android_hardware_Camera.cpp之中定义了一个JNINativeMethod(J***A本地调用方法)类型的数组gMethods,如下所示:
view source
print?
01 | static JNINativeMethod camMethods[] = { |
02 | {"native_setup" , "(Ljava/lang/Object;)V" ,( void *)android_hardware_Camera_native_setup }, |
03 | {"native_release" , "()V" ,( void *)android_hardware_Camera_release }, |
04 | {"setPreviewDisplay" , "(Landroid/view/Surface;)V" ,( void *)android_hardware_Camera_setPreviewDisplay }, |
05 | {"startPreview" , "()V" ,( void *)android_hardware_Camera_startPreview }, |
06 | {"stopPreview" , "()V" , ( void *)android_hardware_Camera_stopPreview }, |
07 | {"setHasPreviewCallback" , "(Z)V" ,( void *)android_hardware_Camera_setHasPreviewCallback }, |
08 | {"native_autoFocus" , "()V" ,( void *)android_hardware_Camera_autoFocus }, |
09 | {"native_takePicture" , "()V" , ( void *)android_hardware_Camera_takePicture }, |
10 | {"native_setParameters" , "(Ljava/lang/String;)V" ,( void *)android_hardware_Camera_setParameters }, |
11 | {"native_getParameters" , "()Ljava/lang/String;" ,( void *)android_hardware_Camera_getParameters } |
12 | }; |
register_android_hardware_Camera函数将gMethods注册为的类”android/media/Camera”,其主要的实现如下所示。
view source
print?
1 | int register_android_hardware_Camera(JNIEnv *env) |
2 | { |
3 | // Register native functions |
4 | return AndroidRuntime::registerNativeMethods(env, "android/hardware/Camera" , |
5 | camMethods, NELEM(camMethods)); |
6 | } |
3.3 Camera本地库libui.so
frameworks/base/libs/ui/中的Camera.cpp文件用于实现Camera.h提供的接口,其中一个重要的片段如下所示
view source
print?
01 | const sp<ICameraService>& Camera::getCameraService() |
02 | { |
03 | Mutex::Autolock _l(mLock); |
04 | if (mCameraService.get() == 0) { |
05 | sp<IServiceManager>sm = defaultServiceManager(); |
06 | sp<IBinder>binder; |
07 | do { |
08 | binder = sm->getService(String16( "media.camera" )); |
09 | if (binder != 0) |
10 | break ; |
11 | LOGW( "CameraService not published, waiting..." ); |
12 | usleep(500000); // 0.5 s |
13 | } while ( true ); |
14 | if (mDeathNotifier == NULL) { |
15 | mDeathNotifier = new DeathNotifier(); |
16 | } |
17 | binder->linkToDeath(mDeathNotifier); |
18 | mCameraService = interface_cast<ICameraService>(binder); |
19 | } |
20 |
21 | LOGE_IF(mCameraService==0, "no CameraService!?" ); |
22 | return mCameraService; |
23 | } |
一个函数 connect的实现 如下所示:
view source
print?
01 | sp<Camera>Camera::connect() |
02 | { |
03 | sp<Camera>c = new Camera(); |
04 | const sp<ICameraService>& cs = getCameraService(); |
05 | if (cs != 0) { |
06 | c->mCamera= cs->connect(c); |
07 | } |
08 | if (c->mCamera!= 0) { |
09 | c->mCamera->asBinder()->linkToDeath(c); |
10 | c->mStatus = NO_ERROR; |
11 | } |
12 | return c; |
13 | } |
一个具体的函数startPreview 如下所示:
view source
print?
1 | status_t Camera::startPreview() |
2 | { |
3 | return mCamera->startPreview(); |
4 | } |
其他一些函数的实现也与setDataSource类似。
libmedia.so中的其他一些文件与头文件的名称相同,它们是:
frameworks/base/libs/ui/ICameraClient.cpp
frameworks/base/libs/ui/ICamera.cpp
frameworks/base/libs/ui/ICameraService.cpp
在此处,BnCameraClient和BnCameraService类虽然实现了onTransact()函数,但是由于还有纯虚函数没有实现,因此这个类都是不能实例化的。
ICameraClient.cpp中的BnCameraClient在别的地方也没有实现;而ICameraService.cpp中的BnCameraService类在别的地方被继承并实现,继承者实现了Camera服务的具体功能
3.4 Camera服务libcameraservice.so
frameworks/base/camera/libcameraservice/ 用于实现一个Camera的服务,这个服务是继承ICameraService的具体实现。在这里的Android.mk文件中,使用宏USE_CAMERA_STUB决定是否使用真的Camera,如果宏为真,则使用 CameraHardwareStub.cpp和FakeCamera.cpp构造一个假的Camera,如果为假则使用 CameraService.cpp构造一个实际上的Camera服务。
CameraService.cpp是继承BnCameraService的实现,在这个类的内部又定义了类Client,CameraService::Client继承了BnCamera。在运作的过程中 CameraService::connect()函数用于得到一个CameraService::Client,在使用过程中,主要是通过调用这个类的 接口来实现完成Camera的功能,由于CameraService::Client本身继承了BnCamera类,而BnCamera类是继承了 ICamera,因此这个类是可以被当成ICamera来使用的。
CameraService和CameraService::Client两个类的结果如下所示:
view source
print?
1 | class CameraService : public BnCameraService |
2 | { |
3 | class Client : public BnCamera{}; |
4 | wp<Client>mClient; |
5 | } |
view source
print?
1 | void CameraService::instantiate() { |
2 | defaultServiceManager()->addService(String16( "media.camera" ), new CameraService()); |
3 | } |
Camera整个运作机制是:在Camera.cpp中可以调用ICameraService的接口,这时实际上调用的是 BpCameraService,而BpCameraService又通过Binder机制和BnCameraService实现两个进程的通讯。而 BpCameraService的实现就是这里的CameraService。因此,Camera.cpp虽然是在另外一个进程中运行,但是调用 ICameraService的接口就像直接调用一样,从connect()中可以得到一个ICamera类型的指针,真个指针的实现实际上是
CameraService::Client。
而这些Camera功能的具体实现,就是CameraService::Client所实现的了,其构造函数如下所示:
view source
print?
1 | CameraService::Client::Client( const sp<CameraService>& cameraService, |
2 | const sp<ICameraClient>& cameraClient) : |
3 | mCameraService(cameraService), mCameraClient(cameraClient), mHardware(0) |
4 | { |
5 | mHardware = openCameraHardware(); |
6 | mHasFrameCallback = false ; |
7 | } |
事实上,真正的Camera功能己通过实现CameraHardwareInterface类来完成。在这个库当中 CameraHardwareStub.h和CameraHardwareStub.cpp两个文件定义了一个桩模块的接口,在没有Camera硬件的情 况下使用,例如在仿真器的情况下使用的文件就是CameraHardwareStub.cpp和它依赖的文件FakeCamera.cpp。
CameraHardwareStub类的结构如下所示:
view source
print?
1 | class CameraHardwareStub : public CameraHardwareInterface { |
2 | class PreviewThread : public Thread { |
3 | }; |
4 | }; |

相关文章推荐
- Android的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍
- [转]Android的Camera架构介绍[有图]
- Android的Camera架构介绍
- Android的Camera架构介绍
- Android 的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍之二
- Android 的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍[有图]
- Android的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍
- Android的Camera架构介绍