HA集群之DRBD浅析及实现DRBD高可用 推荐
2014-05-12 22:04
585 查看
一、DRBD概述DRBD (Distributed Replicated Block Device) 是 Linux 平台上的分散式储存系统。由内核模组、用户空间工具组成,通常用于高可用性(high availability, HA)集群。其实现方式是通过网络在服务器之间的对块设备(硬盘,分区,逻辑卷等)进行镜像。你可以把它看作是一种网络RAID1。DRBD的工作模式如下图: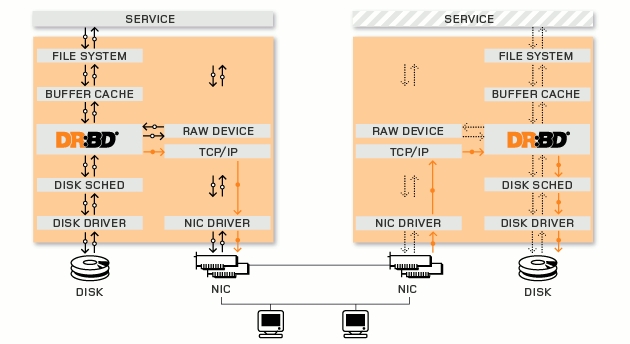 DRBD工作的位置在文件系统的buffer cache和磁盘调度器之间,数据进入Buffer Cache后,DRBD复制一份数据,交给TCP/IP协议栈封装,然后发送到另一个节点上,另一个节点接受到TCP/IP协议报文后解封装,将数据交给DRBD,再由对方的DRBD存储在本地对应磁盘 上。这样主节点数据与备节点数据可以保证实时同步。当主节点出现故障时,备节点上还会保留有一份相同的数据,可供使用。在高可用(HA)集群中中使用DRBD,可以代替一个共享盘阵。 DRBD工作在系统内核空间,它直接复制的二进制数据,故速度很快。 DRBD,由Linux内核架构支撑,因此,不能添加了上层所具备的一些新特性。例如,DRBD技术不能自动检测文件系统损坏。 对于用户来说,一个DRBD设备,就像是一块物理的磁盘,可以在上面内创建文件系统。DRBD需要在底层设备之上构建出一个块设备。DRBD所支持的底层设备包括磁盘(或是磁盘的一个分区)、soft raid 设备、LVM的逻辑卷等块设备。二、DRBD特性一般只能做主从,主的资源为设primary,能不受限制进行读写操作,可以创建文件系统,可以使用裸设备,甚至直接io;从的的资源设为secondary连挂载都不能,并且只能一个主节点,一个从节点,不能一主多从,正是因为这样在集群中只能有一个节点可以随时操作数据,这种模式可用在任何的文件系统上(EXT3、EXT4、XFS等等)。DRBD8.0之后支持双主模式。在双主模式下,任何资源在任何特定的时间,集群中都存在两个主节点。由于双方数据存在并发的可能性,这种模式需要一个共享的集群文件系统(如GFS和OCFS2),利用分布式的锁机制进行管理。部署双主模式时,DRBD是负载均衡的集群,需要从两个并发的主节点中选取一个首选的访问数据。这种模式默认是禁用的,如果要是用的话必须在配置文件中进行声明。DRBD本身没有故障转移能力,当主节点挂了,需要借助高可用集群服务来把保证故障转移(fail-over)的能力,将从提升为主。DRDB本身没有探测对方是否宕机的方法,需要借助高可用集群服务来实现此功能。三、DRBD数据同步模式异步:当数据写到磁盘上,并且复制的数据已经被放到本地的tcp缓冲区等待发送以后,就认为写入完成。(在一个节点发生故障时,可能发生数据丢失,因为被写入到远程节点上的数据可能仍在发送队列。尽管,在故障转移节点上的数据是一致的,但没有及时更新。这通常是用于地理上分开的节点。)半同步:当数据已经写到磁盘上,并且复制的数据已经被放到对端的tcp缓冲区等待写入,就认为写入完成。(数据丢失可能发生在参加的两个节点同时故障的情况下,因为在飞行中的数据可能不会被提交到磁盘。)同步: 本地和对端的磁盘都已经确认了写操作完成,写入才被认为完成。(没有任何数据丢失,所以这是一个群集节点的流行模式,但I/O吞吐量依赖于网络带宽。)DRBD 的复制模型是靠protocol关键字来定义的:protocol A表示异步;protocol B表示半同步;protocol C表示同步,默认为protocol C。四、DRBD脑裂(split brain) split brain实际上是指在某种情况下,造成DRBD的两个节点断开连接,都以primary的身份来运行。当DRBD某primary节点连接对方节点准备发送信息的时候,如果发现对方也是primary状态,那么会立刻自行断开连接,并认定当前已经发生split brain,这时候会在系统日志中记录以下信息:“Split-Brain detected,dropping connection!”当发生split brain之后,如果查看连接状态,其中至少会有一个是StandAlone状态,另外一个可能也是StandAlone(如果是同时发现split brain状态),也有可能是WFConnection的状态。对于脑裂,DRBD有四中处理方式:新成为主节点的把数据丢弃,再同步老节点的数据把老的主节点的数据丢弃,再同步新节点的数据谁的数据修改的少,谁主动丢弃数据如果有个节点从没发生过数据修改,那就不用动自动裂脑自动修复能不能被接受取决于对数据丢失的容忍性。例如,财务的数据库对于任何修改的丢失都是不能容忍的,这 表示不管在什么情况下都需要手工修复裂脑问题。因此,是否启用裂脑自动修复需要考虑具体情况。五、metadata DRBD将数据的各种信息块保存在一个专用的区域里,这些metadata包括DRBD设备的大小、产生的标识、活动日志、快速同步的位图。 metadata的存储方式有内部和外部两种方式,使用方式可以在资源配置中定义。1.内部(internal):metadata存放在同一块硬盘或分区的最后的位置上优点:metadata和数据是在一起,如果硬盘损坏,metadata同样就没有了,但在恢复的时候,metadata也会一起被恢复回来缺点:metadata和数据在同一块硬盘上,磁盘I/O负载大。因为写请求会触发metadata的更新,每一次写操作就会造成两次磁头读写移动。 2.外部(external):metadata存放在和数据磁盘分开的独立的块设备上优点:写操作更流畅缺点:metadata和数据不在一起,所以如果数据盘出现故障,在更换新盘的时候就需要人为的干预来进行新硬盘的同步。六、DRBD的版本 Linux内核2.6.33以后,DRBD内核模块代码直接被整合进Linux内核中,使用DRBD只需安装用户空间管理工具。 在kernel 2.6.33以前的版本版本中,需要同时安装内核模块和用户空间管理工具。 内核模块程序包版本必须要系统内核保持匹配,使用uname -r查看内核版本,然后使用相对应的内核模块。 用户空间管理工具就不那么严格要求。七、DRBD配置工具和配置文件1.配置工具drbdadm:户空间的工具,管理/etc/drbd.conf,向drbdsetup和drbdmeta发送指令。drbdsetup:配置装载进kernel的DRBD模块,很少直接用。drbdmeta:管理META数据结构,一般是修复DRDB时才使用。2.配置文件DRBD的主配置文件为/etc/drbd.conf;为了管理的便捷性,目前通常会将些配置文件分成多个部分,且都保存至/etc/drbd.d目录中,主配置文件中仅使用"include"指令将这些配置文件片断整合起来。 /etc/drbd.d目录中的配置文件为global_common.conf和所有以.res结尾的文件。 global_common.conf中主要定义global段和common段。global段必须位于配置文件的最开始处,可以定义的参数仅有minor-count, dialog-refresh, disable-ip-verification和usage-count。。common段则用于定义被每一个资源默认继承的参数,common段并非必须,但建议将多个资源共享的参数定义为common段中的参数以降低配置文件的复杂度。 每一个.res的文件用于定义一个资源,内里有一个resource段,包含:Resource name:可以是除了空白字符的任意的ACSII码字符DRBD device:在双方节点上,此DRBD设备的设备文件;一般为/dev/drbdN,其主设备号147Disk configuration:在双方节点上,各自提供的存储设备Nerwork configuration:双方数据同步时所使用的网络属性每一个资源段的定义中至少要包含两个host子段,以定义此资源关联至的节点,其它参数均可以从common段或drbd的默认中进行继承。八、安装配置DRBD1.安装DRBD node1/node2均安装
DRBD工作的位置在文件系统的buffer cache和磁盘调度器之间,数据进入Buffer Cache后,DRBD复制一份数据,交给TCP/IP协议栈封装,然后发送到另一个节点上,另一个节点接受到TCP/IP协议报文后解封装,将数据交给DRBD,再由对方的DRBD存储在本地对应磁盘 上。这样主节点数据与备节点数据可以保证实时同步。当主节点出现故障时,备节点上还会保留有一份相同的数据,可供使用。在高可用(HA)集群中中使用DRBD,可以代替一个共享盘阵。 DRBD工作在系统内核空间,它直接复制的二进制数据,故速度很快。 DRBD,由Linux内核架构支撑,因此,不能添加了上层所具备的一些新特性。例如,DRBD技术不能自动检测文件系统损坏。 对于用户来说,一个DRBD设备,就像是一块物理的磁盘,可以在上面内创建文件系统。DRBD需要在底层设备之上构建出一个块设备。DRBD所支持的底层设备包括磁盘(或是磁盘的一个分区)、soft raid 设备、LVM的逻辑卷等块设备。二、DRBD特性一般只能做主从,主的资源为设primary,能不受限制进行读写操作,可以创建文件系统,可以使用裸设备,甚至直接io;从的的资源设为secondary连挂载都不能,并且只能一个主节点,一个从节点,不能一主多从,正是因为这样在集群中只能有一个节点可以随时操作数据,这种模式可用在任何的文件系统上(EXT3、EXT4、XFS等等)。DRBD8.0之后支持双主模式。在双主模式下,任何资源在任何特定的时间,集群中都存在两个主节点。由于双方数据存在并发的可能性,这种模式需要一个共享的集群文件系统(如GFS和OCFS2),利用分布式的锁机制进行管理。部署双主模式时,DRBD是负载均衡的集群,需要从两个并发的主节点中选取一个首选的访问数据。这种模式默认是禁用的,如果要是用的话必须在配置文件中进行声明。DRBD本身没有故障转移能力,当主节点挂了,需要借助高可用集群服务来把保证故障转移(fail-over)的能力,将从提升为主。DRDB本身没有探测对方是否宕机的方法,需要借助高可用集群服务来实现此功能。三、DRBD数据同步模式异步:当数据写到磁盘上,并且复制的数据已经被放到本地的tcp缓冲区等待发送以后,就认为写入完成。(在一个节点发生故障时,可能发生数据丢失,因为被写入到远程节点上的数据可能仍在发送队列。尽管,在故障转移节点上的数据是一致的,但没有及时更新。这通常是用于地理上分开的节点。)半同步:当数据已经写到磁盘上,并且复制的数据已经被放到对端的tcp缓冲区等待写入,就认为写入完成。(数据丢失可能发生在参加的两个节点同时故障的情况下,因为在飞行中的数据可能不会被提交到磁盘。)同步: 本地和对端的磁盘都已经确认了写操作完成,写入才被认为完成。(没有任何数据丢失,所以这是一个群集节点的流行模式,但I/O吞吐量依赖于网络带宽。)DRBD 的复制模型是靠protocol关键字来定义的:protocol A表示异步;protocol B表示半同步;protocol C表示同步,默认为protocol C。四、DRBD脑裂(split brain) split brain实际上是指在某种情况下,造成DRBD的两个节点断开连接,都以primary的身份来运行。当DRBD某primary节点连接对方节点准备发送信息的时候,如果发现对方也是primary状态,那么会立刻自行断开连接,并认定当前已经发生split brain,这时候会在系统日志中记录以下信息:“Split-Brain detected,dropping connection!”当发生split brain之后,如果查看连接状态,其中至少会有一个是StandAlone状态,另外一个可能也是StandAlone(如果是同时发现split brain状态),也有可能是WFConnection的状态。对于脑裂,DRBD有四中处理方式:新成为主节点的把数据丢弃,再同步老节点的数据把老的主节点的数据丢弃,再同步新节点的数据谁的数据修改的少,谁主动丢弃数据如果有个节点从没发生过数据修改,那就不用动自动裂脑自动修复能不能被接受取决于对数据丢失的容忍性。例如,财务的数据库对于任何修改的丢失都是不能容忍的,这 表示不管在什么情况下都需要手工修复裂脑问题。因此,是否启用裂脑自动修复需要考虑具体情况。五、metadata DRBD将数据的各种信息块保存在一个专用的区域里,这些metadata包括DRBD设备的大小、产生的标识、活动日志、快速同步的位图。 metadata的存储方式有内部和外部两种方式,使用方式可以在资源配置中定义。1.内部(internal):metadata存放在同一块硬盘或分区的最后的位置上优点:metadata和数据是在一起,如果硬盘损坏,metadata同样就没有了,但在恢复的时候,metadata也会一起被恢复回来缺点:metadata和数据在同一块硬盘上,磁盘I/O负载大。因为写请求会触发metadata的更新,每一次写操作就会造成两次磁头读写移动。 2.外部(external):metadata存放在和数据磁盘分开的独立的块设备上优点:写操作更流畅缺点:metadata和数据不在一起,所以如果数据盘出现故障,在更换新盘的时候就需要人为的干预来进行新硬盘的同步。六、DRBD的版本 Linux内核2.6.33以后,DRBD内核模块代码直接被整合进Linux内核中,使用DRBD只需安装用户空间管理工具。 在kernel 2.6.33以前的版本版本中,需要同时安装内核模块和用户空间管理工具。 内核模块程序包版本必须要系统内核保持匹配,使用uname -r查看内核版本,然后使用相对应的内核模块。 用户空间管理工具就不那么严格要求。七、DRBD配置工具和配置文件1.配置工具drbdadm:户空间的工具,管理/etc/drbd.conf,向drbdsetup和drbdmeta发送指令。drbdsetup:配置装载进kernel的DRBD模块,很少直接用。drbdmeta:管理META数据结构,一般是修复DRDB时才使用。2.配置文件DRBD的主配置文件为/etc/drbd.conf;为了管理的便捷性,目前通常会将些配置文件分成多个部分,且都保存至/etc/drbd.d目录中,主配置文件中仅使用"include"指令将这些配置文件片断整合起来。 /etc/drbd.d目录中的配置文件为global_common.conf和所有以.res结尾的文件。 global_common.conf中主要定义global段和common段。global段必须位于配置文件的最开始处,可以定义的参数仅有minor-count, dialog-refresh, disable-ip-verification和usage-count。。common段则用于定义被每一个资源默认继承的参数,common段并非必须,但建议将多个资源共享的参数定义为common段中的参数以降低配置文件的复杂度。 每一个.res的文件用于定义一个资源,内里有一个resource段,包含:Resource name:可以是除了空白字符的任意的ACSII码字符DRBD device:在双方节点上,此DRBD设备的设备文件;一般为/dev/drbdN,其主设备号147Disk configuration:在双方节点上,各自提供的存储设备Nerwork configuration:双方数据同步时所使用的网络属性每一个资源段的定义中至少要包含两个host子段,以定义此资源关联至的节点,其它参数均可以从common段或drbd的默认中进行继承。八、安装配置DRBD1.安装DRBD node1/node2均安装
b).配置node之间SSH互信
c).安装corosync和pacemaker 所有节点均安装
d).安装资源管理器客户端命令接口工具crmsh 从pacemaker 1.1.8开始,crmsh发展成了一个独立项目,叫crmsh。pacemaker默认不提供命令接口工具,需要单独安装crmsh。
e).配置主配置文件
f).生成认证key 用corosync-keygen生成key时,由于要使用/dev/random生成随机数,因此如果新装的系统操作不多,如果没有足够的熵,狂敲键盘即可,随意敲,敲够即可。(关于random使用键盘敲击产生随机数的原理可自行google) 实验演示没有足够的熵,这里将采用投机的方式,生产环境,切切不可。
g).copy配置给node2
h).启动corosync
i).检查启动情况
2.实现DRBD高可用a).关闭drbd并设置开机不启动 node1/node2均设置
DRBD工作的位置在文件系统的buffer cache和磁盘调度器之间,数据进入Buffer Cache后,DRBD复制一份数据,交给TCP/IP协议栈封装,然后发送到另一个节点上,另一个节点接受到TCP/IP协议报文后解封装,将数据交给DRBD,再由对方的DRBD存储在本地对应磁盘 上。这样主节点数据与备节点数据可以保证实时同步。当主节点出现故障时,备节点上还会保留有一份相同的数据,可供使用。在高可用(HA)集群中中使用DRBD,可以代替一个共享盘阵。 DRBD工作在系统内核空间,它直接复制的二进制数据,故速度很快。 DRBD,由Linux内核架构支撑,因此,不能添加了上层所具备的一些新特性。例如,DRBD技术不能自动检测文件系统损坏。 对于用户来说,一个DRBD设备,就像是一块物理的磁盘,可以在上面内创建文件系统。DRBD需要在底层设备之上构建出一个块设备。DRBD所支持的底层设备包括磁盘(或是磁盘的一个分区)、soft raid 设备、LVM的逻辑卷等块设备。二、DRBD特性一般只能做主从,主的资源为设primary,能不受限制进行读写操作,可以创建文件系统,可以使用裸设备,甚至直接io;从的的资源设为secondary连挂载都不能,并且只能一个主节点,一个从节点,不能一主多从,正是因为这样在集群中只能有一个节点可以随时操作数据,这种模式可用在任何的文件系统上(EXT3、EXT4、XFS等等)。DRBD8.0之后支持双主模式。在双主模式下,任何资源在任何特定的时间,集群中都存在两个主节点。由于双方数据存在并发的可能性,这种模式需要一个共享的集群文件系统(如GFS和OCFS2),利用分布式的锁机制进行管理。部署双主模式时,DRBD是负载均衡的集群,需要从两个并发的主节点中选取一个首选的访问数据。这种模式默认是禁用的,如果要是用的话必须在配置文件中进行声明。DRBD本身没有故障转移能力,当主节点挂了,需要借助高可用集群服务来把保证故障转移(fail-over)的能力,将从提升为主。DRDB本身没有探测对方是否宕机的方法,需要借助高可用集群服务来实现此功能。三、DRBD数据同步模式异步:当数据写到磁盘上,并且复制的数据已经被放到本地的tcp缓冲区等待发送以后,就认为写入完成。(在一个节点发生故障时,可能发生数据丢失,因为被写入到远程节点上的数据可能仍在发送队列。尽管,在故障转移节点上的数据是一致的,但没有及时更新。这通常是用于地理上分开的节点。)半同步:当数据已经写到磁盘上,并且复制的数据已经被放到对端的tcp缓冲区等待写入,就认为写入完成。(数据丢失可能发生在参加的两个节点同时故障的情况下,因为在飞行中的数据可能不会被提交到磁盘。)同步: 本地和对端的磁盘都已经确认了写操作完成,写入才被认为完成。(没有任何数据丢失,所以这是一个群集节点的流行模式,但I/O吞吐量依赖于网络带宽。)DRBD 的复制模型是靠protocol关键字来定义的:protocol A表示异步;protocol B表示半同步;protocol C表示同步,默认为protocol C。四、DRBD脑裂(split brain) split brain实际上是指在某种情况下,造成DRBD的两个节点断开连接,都以primary的身份来运行。当DRBD某primary节点连接对方节点准备发送信息的时候,如果发现对方也是primary状态,那么会立刻自行断开连接,并认定当前已经发生split brain,这时候会在系统日志中记录以下信息:“Split-Brain detected,dropping connection!”当发生split brain之后,如果查看连接状态,其中至少会有一个是StandAlone状态,另外一个可能也是StandAlone(如果是同时发现split brain状态),也有可能是WFConnection的状态。对于脑裂,DRBD有四中处理方式:新成为主节点的把数据丢弃,再同步老节点的数据把老的主节点的数据丢弃,再同步新节点的数据谁的数据修改的少,谁主动丢弃数据如果有个节点从没发生过数据修改,那就不用动自动裂脑自动修复能不能被接受取决于对数据丢失的容忍性。例如,财务的数据库对于任何修改的丢失都是不能容忍的,这 表示不管在什么情况下都需要手工修复裂脑问题。因此,是否启用裂脑自动修复需要考虑具体情况。五、metadata DRBD将数据的各种信息块保存在一个专用的区域里,这些metadata包括DRBD设备的大小、产生的标识、活动日志、快速同步的位图。 metadata的存储方式有内部和外部两种方式,使用方式可以在资源配置中定义。1.内部(internal):metadata存放在同一块硬盘或分区的最后的位置上优点:metadata和数据是在一起,如果硬盘损坏,metadata同样就没有了,但在恢复的时候,metadata也会一起被恢复回来缺点:metadata和数据在同一块硬盘上,磁盘I/O负载大。因为写请求会触发metadata的更新,每一次写操作就会造成两次磁头读写移动。 2.外部(external):metadata存放在和数据磁盘分开的独立的块设备上优点:写操作更流畅缺点:metadata和数据不在一起,所以如果数据盘出现故障,在更换新盘的时候就需要人为的干预来进行新硬盘的同步。六、DRBD的版本 Linux内核2.6.33以后,DRBD内核模块代码直接被整合进Linux内核中,使用DRBD只需安装用户空间管理工具。 在kernel 2.6.33以前的版本版本中,需要同时安装内核模块和用户空间管理工具。 内核模块程序包版本必须要系统内核保持匹配,使用uname -r查看内核版本,然后使用相对应的内核模块。 用户空间管理工具就不那么严格要求。七、DRBD配置工具和配置文件1.配置工具drbdadm:户空间的工具,管理/etc/drbd.conf,向drbdsetup和drbdmeta发送指令。drbdsetup:配置装载进kernel的DRBD模块,很少直接用。drbdmeta:管理META数据结构,一般是修复DRDB时才使用。2.配置文件DRBD的主配置文件为/etc/drbd.conf;为了管理的便捷性,目前通常会将些配置文件分成多个部分,且都保存至/etc/drbd.d目录中,主配置文件中仅使用"include"指令将这些配置文件片断整合起来。 /etc/drbd.d目录中的配置文件为global_common.conf和所有以.res结尾的文件。 global_common.conf中主要定义global段和common段。global段必须位于配置文件的最开始处,可以定义的参数仅有minor-count, dialog-refresh, disable-ip-verification和usage-count。。common段则用于定义被每一个资源默认继承的参数,common段并非必须,但建议将多个资源共享的参数定义为common段中的参数以降低配置文件的复杂度。 每一个.res的文件用于定义一个资源,内里有一个resource段,包含:Resource name:可以是除了空白字符的任意的ACSII码字符DRBD device:在双方节点上,此DRBD设备的设备文件;一般为/dev/drbdN,其主设备号147Disk configuration:在双方节点上,各自提供的存储设备Nerwork configuration:双方数据同步时所使用的网络属性每一个资源段的定义中至少要包含两个host子段,以定义此资源关联至的节点,其它参数均可以从common段或drbd的默认中进行继承。八、安装配置DRBD1.安装DRBD node1/node2均安装//确定内核版本 # uname -r //安装与版本对应的内核模块和用户空间管理工具 # yum -y install drbd-8.4.3-33.el6.x86_64.rpm drbd-kmdl-2.6.32-431.el6-8.4.3-33.el6.x86_64.rpm2.配置DRBDnode1
[root@node1 ~]# vim /etc/drbd.conf //查看主配置文件 # You can find an example in /usr/share/doc/drbd.../drbd.conf.example include "drbd.d/global_common.conf"; include "drbd.d/*.res";
//修改全局配置文件
# vim /etc/drbd.d/global_common.conf
global { //全局配置
usage-count no; #让linbit公司收集目前drbd的使用情况,yes为参加,我们这里不参加设置为no
# minor-count dialog-refresh disable-ip-verification
}
common {
handlers { #处理器
# These are EXAMPLE handlers only.
# They may have severe implications,
# like hard resetting the node under certain circumstances.
# Be careful when chosing your poison.
pri-on-incon-degr "/usr/lib/drbd/notify-pri-on-incon-degr.sh; /usr/lib/drbd/notify-emergency-reboot.sh; echo b > /proc/sysrq-trigger ; reboot -f";
// 定义了如果主节点降级了怎么处理的
pri-lost-after-sb "/usr/lib/drbd/notify-pri-lost-after-sb.sh; /usr/lib/drbd/notify-emergency-reboot.sh; echo b > /proc/sysrq-trigger ; reboot -f";
//这个定义了如果有脑裂了之后找不到主节点怎么处理的
local-io-error "/usr/lib/drbd/notify-io-error.sh; /usr/lib/drbd/notify-emergency-shutdown.sh; echo o > /proc/sysrq-trigger ; halt -f";
//定义了一旦本地节点发生IO错误时应该怎么处理
# fence-peer "/usr/lib/drbd/crm-fence-peer.sh";
# split-brain "/usr/lib/drbd/notify-split-brain.sh root";
# out-of-sync "/usr/lib/drbd/notify-out-of-sync.sh root";
# before-resync-target "/usr/lib/drbd/snapshot-resync-target-lvm.sh -p 15 -- -c 16k";
# after-resync-target /usr/lib/drbd/unsnapshot-resync-target-lvm.sh;
}
startup { //定义一个节点启动时另一个节点应该怎么做
# wfc-timeout //等待另一个节点上线的超时时长
# degr-wfc-timeout //等待超时后做降级处理
# outdated-wfc-timeout //过期的等待超时
# wait-after-sb //脑裂之后等待多长时长
}
options {
# cpu-mask on-no-data-accessible
}
disk {
on-io-error detach; #同步错误的做法是分离
# size max-bio-bvecs on-io-error fencing disk-barrier disk-flushes
# disk-drain md-flushes resync-rate resync-after al-extents
# c-plan-ahead c-delay-target c-fill-target c-max-rate
# c-min-rate disk-timeout
}
net {
protocol C;
cram-hmac-alg "sha1"; #设置加密算法sha1
shared-secret "mydrbd"; #设置加密key
# protocol timeout max-epoch-size max-buffers unplug-watermark
# connect-int ping-int sndbuf-size rcvbuf-size ko-count
# allow-two-primaries cram-hmac-alg shared-secret after-sb-0pri
# after-sb-1pri after-sb-2pri always-asbp rr-conflict
# ping-timeout data-integrity-alg tcp-cork on-congestion
# congestion-fill congestion-extents csums-alg verify-alg
# use-rle
}
syncer { # 同步相关的设置
rate 1000M; #设置重新同步(re-synchronization)速度
#re-synchronization时候,如果有大量不一致的数据,
#我们不可能将所有带宽都分配给drbd做re- synchronization,
#这样会影响对外提提供服务。rate的设置需要考虑IO能力。
#一般来说,设置网络IO能力和磁盘IO能力中最小者的30%的带宽给re- synchronization是比较合适的(官方说明)
# drbd还提供了一个临时的rate更改命令,可以临时性的更改syncer的rate 值:
#drbdsetup /dev/drbd0 syncer -r 100M
#这样就临时的设置为100M。
#结束之后,通过
#drbdadm adjust resource_name 来让drbd按照配置中的rate工作。
}
}3.为节点准备磁盘分区node1/node2都需要准备,分好区不需要格式化,系统能识别就行可# fdisk /dev/sda //具体不详述 # kpart -af /dev/sda # partx -a /dev/sda //一次识别不出来,可以多重复几次顺便同步时间,均设置
# crontab -e */5 * * * * /usr/sbin/ntpdate 172.16.0.1 &> /dev/null4.定义资源
# cd /etc/drbd.d/
# vim mystore.res
resource mystore { #定义一个资源,用关键字resource;
on node1.hoo.com { #on说明在哪个节点上,跟uname -n保持一致
device /dev/drbd0; #在磁盘上表现的drbd叫什么名;
disk /dev/sda5; #所使用的磁盘设备是哪个;
address 172.16.1.11:7789; #监听的套接字,默认监听在7789端口上;
meta-disk internal; #内部存放metadata
}
on node2.hoo.com {
device /dev/drbd0;
disk /dev/sda5;
address 172.16.1.12:7789;
meta-disk internal;
}
} 5.同步配置文件# scp global_common.conf mystore.res node2:/etc/drbd.d/6.初始化资源node1/node2均初始化
# drbdadm create-md mystore7.启动DRBD服务node1/node2均启动
# service drbd start8.查看启动状态
//以下两种方式均可查看 # cat /proc/drbd 或 # drbd-overview //初始化后,两个节点均处于Secondary状态9.选择主节点将node1提升为主节点
[root@node1 ~]# drbdadm primary --force mystore观察
# drbd-overview //两节点开始同步数据10.格式化并挂载
[root@node1 ~]# mke2fs -t ext4 /dev/drbd0 [root@node1 ~]# mkdir /drbd [root@node1 ~]# mount /dev/drbd0 /drbd11.测试
//复制文件到DRBD设备 [root@node1 ~]# cd /drbd/ [root@node1 drbd]# cp /etc/inittab /drbd/ //角色转换,将node1降级 [root@node1 ~]# drbdadm secondary mystore //将node2提升为主 [root@node2 ~]# drbdadm primary mystore [root@node2 ~]# mkdir /drbd [root@node2 ~]# mount /dev/drbd0 /drbd [root@node2 ~]# cd /drbd [root@node2 ~]# ls //inittab文件存在九、corosync结合pacemaker,实现DRBD高可用 1.搭建集群 a).配置主机名节点名称很关键,集群每个节的名称都得能互相解析。/etc/hosts中的主机名配置结果必须跟”uname -n”的解析的结果一致。 node1/node2都添加:
# service drbd stop# chkconfig drbd off# chkconfig drbd --listb).添加drbd资源
[root@node1 ~]# crmcrm(live)# configurecrm(live)configure# property stonith-enabled=false //禁用stonithcrm(live)configure# property no-quorum-policy=ignore //双节点设置忽略crm(live)configure# rsc_defaults resource-stickiness=100 //资源粘性crm(live)configure# verifycrm(live)configure# commitcrm(live)configure# showcrm(live)configure# meta ocf:linbit:drbd //查看drbd的详细信息crm(live)configure# primitive drbdstore ocf:linbit:drbd params drbd_resource=mystore op monitor role=Master interval=30s timeout=20s op monitor role=Slave interval=60s timeout=20s op start timeout=240s op stop timeout=100s//定义资源crm(live)configure# verifycrm(live)configure# master ms_drbdstore drbdstore meta master-max=1 master-node-max=1 clone-max=2 clone-node-max=1 notify=”True”//定义主资源crm(live)configure# verifycrm(live)configure# commitc).添加文件系统资源定义文件系统资源,让服务器切换时自动挂载
crm(live)configure# primitive drbdfs ocf:heartbeat:Filesystem params device=/dev/drbd0 directory=/drbd fstype=ext4 op monitor interval=30s timeout=40s on-fail-restart op start timeout=60 op stop timeout=60crm(live)configure# verifycrm(live)configure# commitd).定义约束e).测试
//查看节点状态crm(live)# status//显示node2为主//验证挂载:[root@node2 drbd]#ls//显示: inittab lost+found//手动改变节点的主从crm(live)# node standby node2.hoo.com 把node2降级为备用//node1验证挂载信息[root@node1 drbd]#ls

相关文章推荐
- Corosync+Pacemaker+DRBD+MySQL 实现高可用(HA)的MySQL集群 推荐
- Corosync+Pacemaker+DRBD+MySQL 实现高可用(HA)的MySQL集群
- mysql服务器的HA集群之corosync+drbd+pacemaker实现-上篇 推荐
- 基于Corosync+Pacemaker+DRBD 实现高可用(HA)的MariaDB集群
- HA专题: Corosync+Pacemaker+drbd实现MySQL高可用 推荐
- HA集群之DRBD实现MySQL高可用
- CentOS5.8 HA集群之Corosync + Pacemaker + DRBD + MySQL实现MySQL高可用
- nfs+DRBD+corosync+pacemaker 实现高可用(ha)的nfs集群(centos7
- Corosync+pacemaker+DRBD+mysql(mariadb)实现高可用(ha)的mysql集群(centos7)
- 构建DRBD模型的MySQL高可用(HA)集群 推荐
- mfs3.0.85+heartbeat+drbd集群高可用实现
- RHEL5 实现高可用HA集群+GFS+EnterpriseDB
- 高可用集群之heartbeat配置,实现web服务的高可用以及Mariadb高可用 推荐
- mysql服务器的HA集群之corosync+drbd+pacemaker实现
- IPVS-DR+heartbeat+ldirectord实现高可用负载均衡集群 推荐
- Linux集群之corosync+pacemaker+drbd实现MySQL高可用
- 集群:DRBD+corosync+pacemaker实现mysql服务高可用
- 基于heartbeat v1+ldirectord实现LVS集群高可用 推荐
- RHEL5实现高可用HA集群+GFS+EnterpriseDB
- linux高可用(HA)集群笔记heartbeat+drbd+nfs (原创)