Android模拟器学framework和driver之battery & backlight-----5. backlight in linux .
2013-11-13 18:58
381 查看
前面介绍了battery的相关的东西,现在我们来介绍下backlight模块,背光主要是用来调节显示屏亮度的,一般背光都是用PWM控制的,调节占空比达到改变有效电压值来调节光的强弱。
背光的移植在linux中虽然不是那么难,但是背光这个组件对我们嵌入式设备的续航能力有很大的影响,一般背光上面加的电压会有20多的电压,所以这部分会很耗电的,相当于是开了个大灯泡。
现在我们先来看下android goldfish中的背光代码,哈哈,没找到吧,没有,我们打开模拟器,看sysfs中,也是没有具体的背光的文件的,所以这里我们得自己实现,自己写代码练习练习,毕竟这部分不是非常的难,参考drivers/video/backlight/下的pwm_bl.c文件,基本可以仿照,我们要做的事情很简单,创建背光相关的文件系统即可,不需要去控制硬件做什么动作,因为我们本来就没有硬件。
首先看下video中的makefile,如果backlight/没有选中就选中它,不然我们的模块不会编译进去。然后再看下backlight/下的Makefile
[cpp]
view plaincopyprint?
obj-$(CONFIG_LCD_CLASS_DEVICE) += lcd.o
obj-$(CONFIG_LCD_CORGI) += corgi_lcd.o
obj-$(CONFIG_LCD_LTV350QV) += ltv350qv.o
obj-$(CONFIG_LCD_ILI9320) += ili9320.o
obj-$(CONFIG_LCD_PLATFORM) += platform_lcd.o
obj-$(CONFIG_LCD_VGG2432A4) += vgg2432a4.o
obj-$(CONFIG_LCD_TDO24M) += tdo24m.o
obj-$(CONFIG_LCD_TOSA) += tosa_lcd.o
obj-$(CONFIG_BACKLIGHT_CLASS_DEVICE) += backlight.o
obj-$(CONFIG_BACKLIGHT_ATMEL_PWM) += atmel-pwm-bl.o
obj-$(CONFIG_BACKLIGHT_GENERIC) += generic_bl.o
obj-$(CONFIG_BACKLIGHT_HP680) += hp680_bl.o
obj-$(CONFIG_BACKLIGHT_LOCOMO) += locomolcd.o
obj-$(CONFIG_BACKLIGHT_OMAP1) += omap1_bl.o
obj-$(CONFIG_BACKLIGHT_PROGEAR) += progear_bl.o
obj-$(CONFIG_BACKLIGHT_CARILLO_RANCH) += cr_bllcd.o
obj-$(CONFIG_BACKLIGHT_PWM) += pwm_bl.o
obj-$(CONFIG_BACKLIGHT_DA903X) += da903x_bl.o
obj-$(CONFIG_BACKLIGHT_MBP_NVIDIA) += mbp_nvidia_bl.o
obj-$(CONFIG_BACKLIGHT_TOSA) += tosa_bl.o
obj-$(CONFIG_BACKLIGHT_SAHARA) += kb3886_bl.o
这里没有一个文件被编译进去的,我们要把backlight.c先编译进去,直接这样改,我比较懒 呵呵呵,
[cpp]
view plaincopyprint?
obj-y += backlight.o
obj-$(CONFIG_BACKLIGHT_ATMEL_PWM) += atmel-pwm-bl.o
我们先来分析下backlight.c中的代码是如何实现的。
养成好习惯,看见代码多不用怕,首先看init函数:
[cpp]
view plaincopyprint?
static int __init backlight_class_init(void) { backlight_class = class_create(THIS_MODULE, "backlight"); if (IS_ERR(backlight_class)) { printk(KERN_WARNING "Unable to create backlight class; errno = %ld\n", PTR_ERR(backlight_class)); return PTR_ERR(backlight_class); } backlight_class->dev_attrs = bl_device_attributes; backlight_class->suspend = backlight_suspend; backlight_class->resume = backlight_resume; return 0; } /* * if this is compiled into the kernel, we need to ensure that the * class is registered before users of the class try to register lcd's */ postcore_initcall(backlight_class_init);
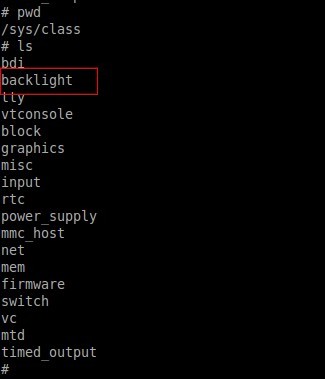
很简单,这里只是用了class_create函数在sys/class下创建了backlight文件夹,然后是
backlight_class->dev_attrs = bl_device_attributes;
在backlight class中创建了一系列的文件系统,
[cpp]
view plaincopyprint?
<pre name="code" class="cpp">static ssize_t backlight_show_power(struct device *dev, struct device_attribute *attr,char *buf) { struct backlight_device *bd = to_backlight_device(dev); return sprintf(buf, "%d\n", bd->props.power); } static ssize_t backlight_store_power(struct device *dev, struct device_attribute *attr, const char *buf, size_t count) { int rc; struct backlight_device *bd = to_backlight_device(dev); unsigned long power; rc = strict_strtoul(buf, 0, &power); if (rc) return rc; rc = -ENXIO; mutex_lock(&bd->ops_lock); if (bd->ops) { pr_debug("backlight: set power to %lu\n", power); if (bd->props.power != power) { bd->props.power = power; backlight_update_status(bd); } rc = count; } mutex_unlock(&bd->ops_lock); return rc; }
所以我们的驱动只要填充好具体的结构体,初始化好文件系统就够了,在sysfs中生成可以让user space调用的接口,接下来的事情就交给上层开发人员去做。
ok,我们来看下我们自己写的驱动,在backlight文件夹下新建一个文件叫 android-backlight.c,我是参照pwm_bl.c来写的,具体先来看下代码,init函数
[cpp]
view plaincopyprint?
static int __init android_backlight_init(void) { return platform_driver_register(&android_backlight_driver); } static void __exit android_backlight_exit(void) { platform_driver_unregister(&android_backlight_driver); } module_init(android_backlight_init); module_exit(android_backlight_exit);
使用platform_driver_register注册平台驱动,看下传入的参数:
[cpp]
view plaincopyprint?
static struct platform_driver android_backlight_driver = {
.driver ={
.name = "android-backlight",
.owner = THIS_MODULE,
},
.probe = android_backlight_probe,
// .remove = ........
// .suspend
// .resume
};
这里我偷懒没写remove suspend和resume'回调函数,在移植具体驱动的时候我们都应该写上,特别是suspend和resume函数,来看下我们paltform驱动的device_register是在哪做的,在arch/arm/mach-goldfish/board-goldfish.c
[cpp]
view plaincopyprint?
struct platform_device android_backlight_device = {
.name = "android-backlight",
.id = 0,
};
static struct platform_pwm_backlight_data android_backlight_data = {
.pwm_id = 0,
.max_brightness = 255,
.dft_brightness = 128,
// .pwm_period_ns = ...;
};
在init中进行注册:
[cpp]
view plaincopyprint?
static void __init goldfish_init(void)
{
platform_device_register(&goldfish_pdev_bus_device);
platform_device_register(&android_light_device);
platform_device_register(&android_switch_device);
platform_device_register(&vh_device);
platform_device_register(&android_temperature_device);
<SPAN style="COLOR: #ff0000">android_register_device(&android_backlight_device, &android_backlight_data);</SPAN>
}
这边android_backlight_data结构体主要是做一个背光的初始化。
接下来我们看一下probe函数,
[cpp]
view plaincopyprint?
static int android_backlight_probe(struct platform_device *pdev)
{
//pass the struct from board-goldfish.c ----> init platform data
struct platform_pwm_backlight_data *data=pdev->dev.platform_data;
//local private struct
struct android_pwm_data *pd;
//backlight properties struct----> defined in include/linux/backlight.h
struct backlight_properties props;
struct backlight_device *bl; //struct infomation defined in include/linux/backlight.h
int ret;
if (!data) {
dev_err(&pdev->dev, "failed to find platform data\n");
return -EINVAL;
}
//----for here we haven't set init pointer function...
if(data->init)
{
ret=data->init(&pdev->dev);
if(ret<0)
return ret;
}
pd = kzalloc(sizeof(*pd),GFP_KERNEL);
if(!pd)
{
dev_err(&pdev->dev, "no memory for state\n");
ret = -ENOMEM;
goto err_alloc;
}
// pd->period = data->pwm_period_ns;
pd->notify = data->notify;
pd->dev = &pdev->dev;
/* pd->pwm = pwm_request(data->pwm_id, "backlight");
if (IS_ERR(pb->pwm)) {
dev_err(&pdev->dev, "unable to request PWM for backlight\n");
ret = PTR_ERR(pb->pwm);
goto err_pwm;
} else
dev_dbg(&pdev->dev, "got pwm for backlight\n");
*/
memset(&props,0,sizeof(struct backlight_properties));
bl = backlight_device_register(dev_name(&pdev->dev), &pdev->dev, pd,&android_backlight_ops);
if (IS_ERR(bl)) {
dev_err(&pdev->dev, "failed to register backlight\n");
ret = PTR_ERR(bl);
// goto err_bl;
}
bl->props.max_brightness = data->max_brightness;
bl->props.brightness=data->dft_brightness;
platform_set_drvdata(pdev,bl);
//err_bl:
// pwm_free(pd->pwm);
//err_pwm:
// kfree(pb);
err_alloc:
if (data->exit)
data->exit(&pdev->dev);
return ret;
}
首先检查我们得到的platform_data结构体中有没有init回调函数,有的话执行,没有的话跳过。
[cpp]
view plaincopyprint?
if(data->init)
{
ret=data->init(&pdev->dev);
if(ret<0)
return ret;
}
这边比较重要的是backlight_device_register函数
[cpp]
view plaincopyprint?
struct backlight_device *backlight_device_register(const char *name, struct device *parent, void *devdata, struct backlight_ops *ops) { struct backlight_device *new_bd; int rc; pr_debug("backlight_device_register: name=%s\n", name); new_bd = kzalloc(sizeof(struct backlight_device), GFP_KERNEL); if (!new_bd) return ERR_PTR(-ENOMEM); mutex_init(&new_bd->update_lock); mutex_init(&new_bd->ops_lock); new_bd->dev.class = backlight_class; new_bd->dev.parent = parent; new_bd->dev.release = bl_device_release; dev_set_name(&new_bd->dev, name); dev_set_drvdata(&new_bd->dev, devdata); rc = device_register(&new_bd->dev); if (rc) { kfree(new_bd); return ERR_PTR(rc); } rc = backlight_register_fb(new_bd); if (rc) { device_unregister(&new_bd->dev); return ERR_PTR(rc); } new_bd->ops = ops; #ifdef CONFIG_PMAC_BACKLIGHT mutex_lock(&pmac_backlight_mutex); if (!pmac_backlight) pmac_backlight = new_bd; mutex_unlock(&pmac_backlight_mutex); #endif return new_bd; } EXPORT_SYMBOL(backlight_device_register);
这里做的最主要的事情就是对一些结构体的初始化,然后调用device_register把我们具体的device挂到我们的backlight class下,具体的是如何实现的我这里不多说,我这里只做一些简单的介绍。这里大家可以看到最重要的是backlight_device_register函数的最后一个参数,这里提供了我们可以自己定义的几个回调函数,
[cpp]
view plaincopyprint?
struct backlight_ops {
unsigned int options;
#define BL_CORE_SUSPENDRESUME (1 << 0)
/* Notify the backlight driver some property has changed */
int (*update_status)(struct backlight_device *);
/* Return the current backlight brightness (accounting for power,
fb_blank etc.) */
int (*get_brightness)(struct backlight_device *);
/* Check if given framebuffer device is the one bound to this backlight;
return 0 if not, !=0 if it is. If NULL, backlight always matches the fb. */
int (*check_fb)(struct fb_info *);
};
我们这边定义了2个回调函数挂上去:
[cpp]
view plaincopyprint?
static const struct backlight_ops android_backlight_ops = { .update_status = android_backlight_update_status, .get_brightness = android_backlight_get_brightness, // .check_fb... };
然后我们去实现这2个函数,就基本完成了我们的驱动了,看函数名字就知道这2个函数的作用,一个是用来更新我们的背光亮度,还有一个是用来得到我们的光强。
[cpp]
view plaincopyprint?
static int android_backlight_get_brightness(struct backlight_device *bl) { printk(KERN_INFO "[android]---get brightness...\n"); return bl->props.brightness; }
这个函数比较简单,就是返回backlight_device->props->brightness,我们来看下最终我们的brightness是哪里写进去的。这里比较绕,我们还是结合update函数一起分析:
[cpp]
view plaincopyprint?
static int android_backlight_update_status(struct backlight_device *bl)
{
struct android_pwm_data *pd = dev_get_drvdata(&bl->dev);
int brightness = bl->props.brightness;
int max=bl->props.max_brightness;
/* if (bl->props.power != FB_BLANK_UNBLANK)
brightness = 0;
if (bl->props.fb_blank != FB_BLANK_UNBLANK)
brightness = 0;
*/
printk(KERN_INFO "update brightness...\n");
if (pd->notify)
brightness = pd->notify(pd->dev, brightness);
//+++add
global_brightness = brightness;
// complete(&priv_event);
printk(KERN_INFO "complete event....\n");
return 0;
}
我们姑且这么理解,我们有一个结构体,brightness_properity用来存放backlight的一些属性信息,比如说brightness,当我们要get_brightness的时候就是去返回这个brightness,当我们要调节光强的时候就是给这个结构体中的成员变量赋值。
首先我们要了解android中用户层是怎么做的,因为我们linux driver最终的目标就是服务用户层,所以我们要了解。
其实android HAL层就是open backlight中的brightness这个节点,然后进行读写来设置背光的亮度的,好吧,先来看下读写这个节点会呼叫的回调函数
在backlight.c中实现:
[cpp]
view plaincopyprint?
static ssize_t backlight_show_brightness(struct device *dev, struct device_attribute *attr, char *buf) { struct backlight_device *bd = to_backlight_device(dev); return sprintf(buf, "%d\n", bd->props.brightness); } static ssize_t backlight_store_brightness(struct device *dev, struct device_attribute *attr, const char *buf, size_t count) { int rc; struct backlight_device *bd = to_backlight_device(dev); unsigned long brightness; rc = strict_strtoul(buf, 0, &brightness); if (rc) return rc; rc = -ENXIO; mutex_lock(&bd->ops_lock); if (bd->ops) { if (brightness > bd->props.max_brightness) rc = -EINVAL; else { pr_debug("backlight: set brightness to %lu\n", brightness); bd->props.brightness = brightness; backlight_update_status(bd); rc = count; } } mutex_unlock(&bd->ops_lock); return rc; }
当我们向brightness这个文件节点中写入我们要设置的背光亮度的时候会调用store这个回调函数,我们来看下主要做了哪些事情,跟我们在driver层自己写的update函数到底有什么关系呢?
前面都是一大堆不用看的代码,这里最重要的看这个
[cpp]
view plaincopyprint?
if (bd->ops) {
if (brightness > bd->props.max_brightness)
rc = -EINVAL;
else {
pr_debug("backlight: set brightness to %lu\n",
brightness);
<SPAN style="COLOR: #ff0000"> bd->props.brightness = brightness;
backlight_update_status(bd);</SPAN>
rc = count;
}
}
首先是把brightness写进我们的背光属性结构体中,这样就更新了我们数据结构中的背光亮度在值,但是这样做是不够的,因为我们最终要控制的是硬件,所以看下之后我们调用了backlight_update_status函数,ok,看下这个函数的定义:
/include/linux/backlight.h
[cpp]
view plaincopyprint?
static inline void backlight_update_status(struct backlight_device *bd) { mutex_lock(&bd->update_lock); if (bd->ops && bd->ops->update_status) bd->ops->update_status(bd); mutex_unlock(&bd->update_lock); }
看下这个内联函数,看到ops就知道了吧,这边调用了bd->ops->update_status这里就调用到了我们自己写的update_status回调函数:
[cpp]
view plaincopyprint?
static const struct backlight_ops android_backlight_ops = { .update_status = android_backlight_update_status, .get_brightness = android_backlight_get_brightness, // .check_fb... };
[cpp]
view plaincopyprint?
static int android_backlight_update_status(struct backlight_device *bl)
{
struct android_pwm_data *pd = dev_get_drvdata(&bl->dev);
int brightness = bl->props.brightness;
int max=bl->props.max_brightness;
/* if (bl->props.power != FB_BLANK_UNBLANK)
brightness = 0;
if (bl->props.fb_blank != FB_BLANK_UNBLANK)
brightness = 0;
*/
printk(KERN_INFO "update brightness...\n");
if (pd->notify)
brightness = pd->notify(pd->dev, brightness);
//+++add
global_brightness = brightness;
// complete(&priv_event);
printk(KERN_INFO "complete event....\n");
return 0;
}
这里咱也没做什么,因为android模拟器没有真正的背光的设备,我们打印了信息,还有就是一个notify回调函数,这里我们也没有实现,这里我猜想就是这边背光如果涉及到别的deivce的行为的话,这个notify函数可以通知到别的设备。
ok,这边就介绍结束了,我们来启动我们的android模拟器来看下sysfs中backlight下我们自己的节点。
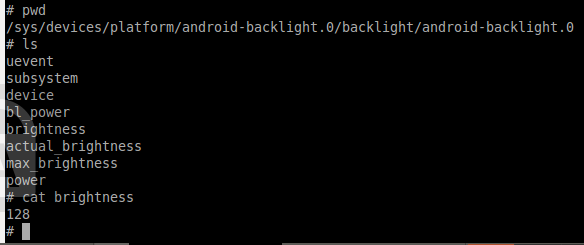
大家可以看到我们自己的device的文件系统,我们cat 出来的brightness就是我们在board-goldfish.c中设置的初始值。
=====================================================
OK,这部分就介绍到这,下面一篇会介绍到我们HAL层中是如何封装我们driver中的接口的。
背光的移植在linux中虽然不是那么难,但是背光这个组件对我们嵌入式设备的续航能力有很大的影响,一般背光上面加的电压会有20多的电压,所以这部分会很耗电的,相当于是开了个大灯泡。
现在我们先来看下android goldfish中的背光代码,哈哈,没找到吧,没有,我们打开模拟器,看sysfs中,也是没有具体的背光的文件的,所以这里我们得自己实现,自己写代码练习练习,毕竟这部分不是非常的难,参考drivers/video/backlight/下的pwm_bl.c文件,基本可以仿照,我们要做的事情很简单,创建背光相关的文件系统即可,不需要去控制硬件做什么动作,因为我们本来就没有硬件。
首先看下video中的makefile,如果backlight/没有选中就选中它,不然我们的模块不会编译进去。然后再看下backlight/下的Makefile
[cpp]
view plaincopyprint?
obj-$(CONFIG_LCD_CLASS_DEVICE) += lcd.o
obj-$(CONFIG_LCD_CORGI) += corgi_lcd.o
obj-$(CONFIG_LCD_LTV350QV) += ltv350qv.o
obj-$(CONFIG_LCD_ILI9320) += ili9320.o
obj-$(CONFIG_LCD_PLATFORM) += platform_lcd.o
obj-$(CONFIG_LCD_VGG2432A4) += vgg2432a4.o
obj-$(CONFIG_LCD_TDO24M) += tdo24m.o
obj-$(CONFIG_LCD_TOSA) += tosa_lcd.o
obj-$(CONFIG_BACKLIGHT_CLASS_DEVICE) += backlight.o
obj-$(CONFIG_BACKLIGHT_ATMEL_PWM) += atmel-pwm-bl.o
obj-$(CONFIG_BACKLIGHT_GENERIC) += generic_bl.o
obj-$(CONFIG_BACKLIGHT_HP680) += hp680_bl.o
obj-$(CONFIG_BACKLIGHT_LOCOMO) += locomolcd.o
obj-$(CONFIG_BACKLIGHT_OMAP1) += omap1_bl.o
obj-$(CONFIG_BACKLIGHT_PROGEAR) += progear_bl.o
obj-$(CONFIG_BACKLIGHT_CARILLO_RANCH) += cr_bllcd.o
obj-$(CONFIG_BACKLIGHT_PWM) += pwm_bl.o
obj-$(CONFIG_BACKLIGHT_DA903X) += da903x_bl.o
obj-$(CONFIG_BACKLIGHT_MBP_NVIDIA) += mbp_nvidia_bl.o
obj-$(CONFIG_BACKLIGHT_TOSA) += tosa_bl.o
obj-$(CONFIG_BACKLIGHT_SAHARA) += kb3886_bl.o
obj-$(CONFIG_LCD_CLASS_DEVICE) += lcd.o obj-$(CONFIG_LCD_CORGI) += corgi_lcd.o obj-$(CONFIG_LCD_LTV350QV) += ltv350qv.o obj-$(CONFIG_LCD_ILI9320) += ili9320.o obj-$(CONFIG_LCD_PLATFORM) += platform_lcd.o obj-$(CONFIG_LCD_VGG2432A4) += vgg2432a4.o obj-$(CONFIG_LCD_TDO24M) += tdo24m.o obj-$(CONFIG_LCD_TOSA) += tosa_lcd.o obj-$(CONFIG_BACKLIGHT_CLASS_DEVICE) += backlight.o obj-$(CONFIG_BACKLIGHT_ATMEL_PWM) += atmel-pwm-bl.o obj-$(CONFIG_BACKLIGHT_GENERIC) += generic_bl.o obj-$(CONFIG_BACKLIGHT_HP680) += hp680_bl.o obj-$(CONFIG_BACKLIGHT_LOCOMO) += locomolcd.o obj-$(CONFIG_BACKLIGHT_OMAP1) += omap1_bl.o obj-$(CONFIG_BACKLIGHT_PROGEAR) += progear_bl.o obj-$(CONFIG_BACKLIGHT_CARILLO_RANCH) += cr_bllcd.o obj-$(CONFIG_BACKLIGHT_PWM) += pwm_bl.o obj-$(CONFIG_BACKLIGHT_DA903X) += da903x_bl.o obj-$(CONFIG_BACKLIGHT_MBP_NVIDIA) += mbp_nvidia_bl.o obj-$(CONFIG_BACKLIGHT_TOSA) += tosa_bl.o obj-$(CONFIG_BACKLIGHT_SAHARA) += kb3886_bl.o
这里没有一个文件被编译进去的,我们要把backlight.c先编译进去,直接这样改,我比较懒 呵呵呵,
[cpp]
view plaincopyprint?
obj-y += backlight.o
obj-$(CONFIG_BACKLIGHT_ATMEL_PWM) += atmel-pwm-bl.o
obj-y += backlight.o obj-$(CONFIG_BACKLIGHT_ATMEL_PWM) += atmel-pwm-bl.o然后重新编译下会生成backlight.o文件,并且在sysfs中会生成我们的backlight class
我们先来分析下backlight.c中的代码是如何实现的。
养成好习惯,看见代码多不用怕,首先看init函数:
[cpp]
view plaincopyprint?
static int __init backlight_class_init(void) { backlight_class = class_create(THIS_MODULE, "backlight"); if (IS_ERR(backlight_class)) { printk(KERN_WARNING "Unable to create backlight class; errno = %ld\n", PTR_ERR(backlight_class)); return PTR_ERR(backlight_class); } backlight_class->dev_attrs = bl_device_attributes; backlight_class->suspend = backlight_suspend; backlight_class->resume = backlight_resume; return 0; } /* * if this is compiled into the kernel, we need to ensure that the * class is registered before users of the class try to register lcd's */ postcore_initcall(backlight_class_init);
static int __init backlight_class_init(void)
{
backlight_class = class_create(THIS_MODULE, "backlight");
if (IS_ERR(backlight_class)) {
printk(KERN_WARNING "Unable to create backlight class; errno = %ld\n",
PTR_ERR(backlight_class));
return PTR_ERR(backlight_class);
}
backlight_class->dev_attrs = bl_device_attributes;
backlight_class->suspend = backlight_suspend;
backlight_class->resume = backlight_resume;
return 0;
}
/*
* if this is compiled into the kernel, we need to ensure that the
* class is registered before users of the class try to register lcd's
*/
postcore_initcall(backlight_class_init);很简单,这里只是用了class_create函数在sys/class下创建了backlight文件夹,然后是
backlight_class->dev_attrs = bl_device_attributes;
在backlight class中创建了一系列的文件系统,
[cpp]
view plaincopyprint?
<pre name="code" class="cpp">static ssize_t backlight_show_power(struct device *dev, struct device_attribute *attr,char *buf) { struct backlight_device *bd = to_backlight_device(dev); return sprintf(buf, "%d\n", bd->props.power); } static ssize_t backlight_store_power(struct device *dev, struct device_attribute *attr, const char *buf, size_t count) { int rc; struct backlight_device *bd = to_backlight_device(dev); unsigned long power; rc = strict_strtoul(buf, 0, &power); if (rc) return rc; rc = -ENXIO; mutex_lock(&bd->ops_lock); if (bd->ops) { pr_debug("backlight: set power to %lu\n", power); if (bd->props.power != power) { bd->props.power = power; backlight_update_status(bd); } rc = count; } mutex_unlock(&bd->ops_lock); return rc; }
<pre name="code" class="cpp">static ssize_t backlight_show_power(struct device *dev,
struct device_attribute *attr,char *buf)
{
struct backlight_device *bd = to_backlight_device(dev);
return sprintf(buf, "%d\n", bd->props.power);
}
static ssize_t backlight_store_power(struct device *dev,
struct device_attribute *attr, const char *buf, size_t count)
{
int rc;
struct backlight_device *bd = to_backlight_device(dev);
unsigned long power;
rc = strict_strtoul(buf, 0, &power);
if (rc)
return rc;
rc = -ENXIO;
mutex_lock(&bd->ops_lock);
if (bd->ops) {
pr_debug("backlight: set power to %lu\n", power);
if (bd->props.power != power) {
bd->props.power = power;
backlight_update_status(bd);
}
rc = count;
}
mutex_unlock(&bd->ops_lock);
return rc;
}所以我们的驱动只要填充好具体的结构体,初始化好文件系统就够了,在sysfs中生成可以让user space调用的接口,接下来的事情就交给上层开发人员去做。
ok,我们来看下我们自己写的驱动,在backlight文件夹下新建一个文件叫 android-backlight.c,我是参照pwm_bl.c来写的,具体先来看下代码,init函数
[cpp]
view plaincopyprint?
static int __init android_backlight_init(void) { return platform_driver_register(&android_backlight_driver); } static void __exit android_backlight_exit(void) { platform_driver_unregister(&android_backlight_driver); } module_init(android_backlight_init); module_exit(android_backlight_exit);
static int __init android_backlight_init(void)
{
return platform_driver_register(&android_backlight_driver);
}
static void __exit android_backlight_exit(void)
{
platform_driver_unregister(&android_backlight_driver);
}
module_init(android_backlight_init);
module_exit(android_backlight_exit);使用platform_driver_register注册平台驱动,看下传入的参数:
[cpp]
view plaincopyprint?
static struct platform_driver android_backlight_driver = {
.driver ={
.name = "android-backlight",
.owner = THIS_MODULE,
},
.probe = android_backlight_probe,
// .remove = ........
// .suspend
// .resume
};
static struct platform_driver android_backlight_driver = {
.driver ={
.name = "android-backlight",
.owner = THIS_MODULE,
},
.probe = android_backlight_probe,
// .remove = ........
// .suspend
// .resume
};这里我偷懒没写remove suspend和resume'回调函数,在移植具体驱动的时候我们都应该写上,特别是suspend和resume函数,来看下我们paltform驱动的device_register是在哪做的,在arch/arm/mach-goldfish/board-goldfish.c
[cpp]
view plaincopyprint?
struct platform_device android_backlight_device = {
.name = "android-backlight",
.id = 0,
};
static struct platform_pwm_backlight_data android_backlight_data = {
.pwm_id = 0,
.max_brightness = 255,
.dft_brightness = 128,
// .pwm_period_ns = ...;
};
struct platform_device android_backlight_device = {
.name = "android-backlight",
.id = 0,
};
static struct platform_pwm_backlight_data android_backlight_data = {
.pwm_id = 0,
.max_brightness = 255,
.dft_brightness = 128,
// .pwm_period_ns = ...;
};在init中进行注册:
[cpp]
view plaincopyprint?
static void __init goldfish_init(void)
{
platform_device_register(&goldfish_pdev_bus_device);
platform_device_register(&android_light_device);
platform_device_register(&android_switch_device);
platform_device_register(&vh_device);
platform_device_register(&android_temperature_device);
<SPAN style="COLOR: #ff0000">android_register_device(&android_backlight_device, &android_backlight_data);</SPAN>
}
static void __init goldfish_init(void)
{
platform_device_register(&goldfish_pdev_bus_device);
platform_device_register(&android_light_device);
platform_device_register(&android_switch_device);
platform_device_register(&vh_device);
platform_device_register(&android_temperature_device);
android_register_device(&android_backlight_device, &android_backlight_data);
}这边android_backlight_data结构体主要是做一个背光的初始化。
接下来我们看一下probe函数,
[cpp]
view plaincopyprint?
static int android_backlight_probe(struct platform_device *pdev)
{
//pass the struct from board-goldfish.c ----> init platform data
struct platform_pwm_backlight_data *data=pdev->dev.platform_data;
//local private struct
struct android_pwm_data *pd;
//backlight properties struct----> defined in include/linux/backlight.h
struct backlight_properties props;
struct backlight_device *bl; //struct infomation defined in include/linux/backlight.h
int ret;
if (!data) {
dev_err(&pdev->dev, "failed to find platform data\n");
return -EINVAL;
}
//----for here we haven't set init pointer function...
if(data->init)
{
ret=data->init(&pdev->dev);
if(ret<0)
return ret;
}
pd = kzalloc(sizeof(*pd),GFP_KERNEL);
if(!pd)
{
dev_err(&pdev->dev, "no memory for state\n");
ret = -ENOMEM;
goto err_alloc;
}
// pd->period = data->pwm_period_ns;
pd->notify = data->notify;
pd->dev = &pdev->dev;
/* pd->pwm = pwm_request(data->pwm_id, "backlight");
if (IS_ERR(pb->pwm)) {
dev_err(&pdev->dev, "unable to request PWM for backlight\n");
ret = PTR_ERR(pb->pwm);
goto err_pwm;
} else
dev_dbg(&pdev->dev, "got pwm for backlight\n");
*/
memset(&props,0,sizeof(struct backlight_properties));
bl = backlight_device_register(dev_name(&pdev->dev), &pdev->dev, pd,&android_backlight_ops);
if (IS_ERR(bl)) {
dev_err(&pdev->dev, "failed to register backlight\n");
ret = PTR_ERR(bl);
// goto err_bl;
}
bl->props.max_brightness = data->max_brightness;
bl->props.brightness=data->dft_brightness;
platform_set_drvdata(pdev,bl);
//err_bl:
// pwm_free(pd->pwm);
//err_pwm:
// kfree(pb);
err_alloc:
if (data->exit)
data->exit(&pdev->dev);
return ret;
}
static int android_backlight_probe(struct platform_device *pdev)
{
//pass the struct from board-goldfish.c ----> init platform data
struct platform_pwm_backlight_data *data=pdev->dev.platform_data;
//local private struct
struct android_pwm_data *pd;
//backlight properties struct----> defined in include/linux/backlight.h
struct backlight_properties props;
struct backlight_device *bl; //struct infomation defined in include/linux/backlight.h
int ret;
if (!data) {
dev_err(&pdev->dev, "failed to find platform data\n");
return -EINVAL;
}
//----for here we haven't set init pointer function...
if(data->init)
{
ret=data->init(&pdev->dev);
if(ret<0)
return ret;
}
pd = kzalloc(sizeof(*pd),GFP_KERNEL);
if(!pd)
{
dev_err(&pdev->dev, "no memory for state\n");
ret = -ENOMEM;
goto err_alloc;
}
// pd->period = data->pwm_period_ns;
pd->notify = data->notify;
pd->dev = &pdev->dev;
/* pd->pwm = pwm_request(data->pwm_id, "backlight");
if (IS_ERR(pb->pwm)) {
dev_err(&pdev->dev, "unable to request PWM for backlight\n");
ret = PTR_ERR(pb->pwm);
goto err_pwm;
} else
dev_dbg(&pdev->dev, "got pwm for backlight\n");
*/
memset(&props,0,sizeof(struct backlight_properties));
bl = backlight_device_register(dev_name(&pdev->dev), &pdev->dev, pd,&android_backlight_ops);
if (IS_ERR(bl)) {
dev_err(&pdev->dev, "failed to register backlight\n");
ret = PTR_ERR(bl);
// goto err_bl;
}
bl->props.max_brightness = data->max_brightness;
bl->props.brightness=data->dft_brightness;
platform_set_drvdata(pdev,bl);
//err_bl:
// pwm_free(pd->pwm);
//err_pwm:
// kfree(pb);
err_alloc:
if (data->exit)
data->exit(&pdev->dev);
return ret;
}首先检查我们得到的platform_data结构体中有没有init回调函数,有的话执行,没有的话跳过。
[cpp]
view plaincopyprint?
if(data->init)
{
ret=data->init(&pdev->dev);
if(ret<0)
return ret;
}
if(data->init)
{
ret=data->init(&pdev->dev);
if(ret<0)
return ret;
}这边比较重要的是backlight_device_register函数
[cpp]
view plaincopyprint?
struct backlight_device *backlight_device_register(const char *name, struct device *parent, void *devdata, struct backlight_ops *ops) { struct backlight_device *new_bd; int rc; pr_debug("backlight_device_register: name=%s\n", name); new_bd = kzalloc(sizeof(struct backlight_device), GFP_KERNEL); if (!new_bd) return ERR_PTR(-ENOMEM); mutex_init(&new_bd->update_lock); mutex_init(&new_bd->ops_lock); new_bd->dev.class = backlight_class; new_bd->dev.parent = parent; new_bd->dev.release = bl_device_release; dev_set_name(&new_bd->dev, name); dev_set_drvdata(&new_bd->dev, devdata); rc = device_register(&new_bd->dev); if (rc) { kfree(new_bd); return ERR_PTR(rc); } rc = backlight_register_fb(new_bd); if (rc) { device_unregister(&new_bd->dev); return ERR_PTR(rc); } new_bd->ops = ops; #ifdef CONFIG_PMAC_BACKLIGHT mutex_lock(&pmac_backlight_mutex); if (!pmac_backlight) pmac_backlight = new_bd; mutex_unlock(&pmac_backlight_mutex); #endif return new_bd; } EXPORT_SYMBOL(backlight_device_register);
struct backlight_device *backlight_device_register(const char *name,
struct device *parent, void *devdata, struct backlight_ops *ops)
{
struct backlight_device *new_bd;
int rc;
pr_debug("backlight_device_register: name=%s\n", name);
new_bd = kzalloc(sizeof(struct backlight_device), GFP_KERNEL);
if (!new_bd)
return ERR_PTR(-ENOMEM);
mutex_init(&new_bd->update_lock);
mutex_init(&new_bd->ops_lock);
new_bd->dev.class = backlight_class;
new_bd->dev.parent = parent;
new_bd->dev.release = bl_device_release;
dev_set_name(&new_bd->dev, name);
dev_set_drvdata(&new_bd->dev, devdata);
rc = device_register(&new_bd->dev);
if (rc) {
kfree(new_bd);
return ERR_PTR(rc);
}
rc = backlight_register_fb(new_bd);
if (rc) {
device_unregister(&new_bd->dev);
return ERR_PTR(rc);
}
new_bd->ops = ops;
#ifdef CONFIG_PMAC_BACKLIGHT
mutex_lock(&pmac_backlight_mutex);
if (!pmac_backlight)
pmac_backlight = new_bd;
mutex_unlock(&pmac_backlight_mutex);
#endif
return new_bd;
}
EXPORT_SYMBOL(backlight_device_register);这里做的最主要的事情就是对一些结构体的初始化,然后调用device_register把我们具体的device挂到我们的backlight class下,具体的是如何实现的我这里不多说,我这里只做一些简单的介绍。这里大家可以看到最重要的是backlight_device_register函数的最后一个参数,这里提供了我们可以自己定义的几个回调函数,
[cpp]
view plaincopyprint?
struct backlight_ops {
unsigned int options;
#define BL_CORE_SUSPENDRESUME (1 << 0)
/* Notify the backlight driver some property has changed */
int (*update_status)(struct backlight_device *);
/* Return the current backlight brightness (accounting for power,
fb_blank etc.) */
int (*get_brightness)(struct backlight_device *);
/* Check if given framebuffer device is the one bound to this backlight;
return 0 if not, !=0 if it is. If NULL, backlight always matches the fb. */
int (*check_fb)(struct fb_info *);
};
struct backlight_ops {
unsigned int options;
#define BL_CORE_SUSPENDRESUME (1 << 0)
/* Notify the backlight driver some property has changed */
int (*update_status)(struct backlight_device *);
/* Return the current backlight brightness (accounting for power,
fb_blank etc.) */
int (*get_brightness)(struct backlight_device *);
/* Check if given framebuffer device is the one bound to this backlight;
return 0 if not, !=0 if it is. If NULL, backlight always matches the fb. */
int (*check_fb)(struct fb_info *);
};我们这边定义了2个回调函数挂上去:
[cpp]
view plaincopyprint?
static const struct backlight_ops android_backlight_ops = { .update_status = android_backlight_update_status, .get_brightness = android_backlight_get_brightness, // .check_fb... };
static const struct backlight_ops android_backlight_ops = {
.update_status = android_backlight_update_status,
.get_brightness = android_backlight_get_brightness,
// .check_fb...
};然后我们去实现这2个函数,就基本完成了我们的驱动了,看函数名字就知道这2个函数的作用,一个是用来更新我们的背光亮度,还有一个是用来得到我们的光强。
[cpp]
view plaincopyprint?
static int android_backlight_get_brightness(struct backlight_device *bl) { printk(KERN_INFO "[android]---get brightness...\n"); return bl->props.brightness; }
static int android_backlight_get_brightness(struct backlight_device *bl)
{
printk(KERN_INFO "[android]---get brightness...\n");
return bl->props.brightness;
}这个函数比较简单,就是返回backlight_device->props->brightness,我们来看下最终我们的brightness是哪里写进去的。这里比较绕,我们还是结合update函数一起分析:
[cpp]
view plaincopyprint?
static int android_backlight_update_status(struct backlight_device *bl)
{
struct android_pwm_data *pd = dev_get_drvdata(&bl->dev);
int brightness = bl->props.brightness;
int max=bl->props.max_brightness;
/* if (bl->props.power != FB_BLANK_UNBLANK)
brightness = 0;
if (bl->props.fb_blank != FB_BLANK_UNBLANK)
brightness = 0;
*/
printk(KERN_INFO "update brightness...\n");
if (pd->notify)
brightness = pd->notify(pd->dev, brightness);
//+++add
global_brightness = brightness;
// complete(&priv_event);
printk(KERN_INFO "complete event....\n");
return 0;
}
static int android_backlight_update_status(struct backlight_device *bl)
{
struct android_pwm_data *pd = dev_get_drvdata(&bl->dev);
int brightness = bl->props.brightness;
int max=bl->props.max_brightness;
/* if (bl->props.power != FB_BLANK_UNBLANK)
brightness = 0;
if (bl->props.fb_blank != FB_BLANK_UNBLANK)
brightness = 0;
*/
printk(KERN_INFO "update brightness...\n");
if (pd->notify)
brightness = pd->notify(pd->dev, brightness);
//+++add
global_brightness = brightness;
// complete(&priv_event);
printk(KERN_INFO "complete event....\n");
return 0;
}我们姑且这么理解,我们有一个结构体,brightness_properity用来存放backlight的一些属性信息,比如说brightness,当我们要get_brightness的时候就是去返回这个brightness,当我们要调节光强的时候就是给这个结构体中的成员变量赋值。
首先我们要了解android中用户层是怎么做的,因为我们linux driver最终的目标就是服务用户层,所以我们要了解。
其实android HAL层就是open backlight中的brightness这个节点,然后进行读写来设置背光的亮度的,好吧,先来看下读写这个节点会呼叫的回调函数
在backlight.c中实现:
[cpp]
view plaincopyprint?
static ssize_t backlight_show_brightness(struct device *dev, struct device_attribute *attr, char *buf) { struct backlight_device *bd = to_backlight_device(dev); return sprintf(buf, "%d\n", bd->props.brightness); } static ssize_t backlight_store_brightness(struct device *dev, struct device_attribute *attr, const char *buf, size_t count) { int rc; struct backlight_device *bd = to_backlight_device(dev); unsigned long brightness; rc = strict_strtoul(buf, 0, &brightness); if (rc) return rc; rc = -ENXIO; mutex_lock(&bd->ops_lock); if (bd->ops) { if (brightness > bd->props.max_brightness) rc = -EINVAL; else { pr_debug("backlight: set brightness to %lu\n", brightness); bd->props.brightness = brightness; backlight_update_status(bd); rc = count; } } mutex_unlock(&bd->ops_lock); return rc; }
static ssize_t backlight_show_brightness(struct device *dev,
struct device_attribute *attr, char *buf)
{
struct backlight_device *bd = to_backlight_device(dev);
return sprintf(buf, "%d\n", bd->props.brightness);
}
static ssize_t backlight_store_brightness(struct device *dev,
struct device_attribute *attr, const char *buf, size_t count)
{
int rc;
struct backlight_device *bd = to_backlight_device(dev);
unsigned long brightness;
rc = strict_strtoul(buf, 0, &brightness);
if (rc)
return rc;
rc = -ENXIO;
mutex_lock(&bd->ops_lock);
if (bd->ops) {
if (brightness > bd->props.max_brightness)
rc = -EINVAL;
else {
pr_debug("backlight: set brightness to %lu\n",
brightness);
bd->props.brightness = brightness;
backlight_update_status(bd);
rc = count;
}
}
mutex_unlock(&bd->ops_lock);
return rc;
}当我们向brightness这个文件节点中写入我们要设置的背光亮度的时候会调用store这个回调函数,我们来看下主要做了哪些事情,跟我们在driver层自己写的update函数到底有什么关系呢?
前面都是一大堆不用看的代码,这里最重要的看这个
[cpp]
view plaincopyprint?
if (bd->ops) {
if (brightness > bd->props.max_brightness)
rc = -EINVAL;
else {
pr_debug("backlight: set brightness to %lu\n",
brightness);
<SPAN style="COLOR: #ff0000"> bd->props.brightness = brightness;
backlight_update_status(bd);</SPAN>
rc = count;
}
}
if (bd->ops) {
if (brightness > bd->props.max_brightness)
rc = -EINVAL;
else {
pr_debug("backlight: set brightness to %lu\n",
brightness);
bd->props.brightness = brightness;
backlight_update_status(bd);
rc = count;
}
}首先是把brightness写进我们的背光属性结构体中,这样就更新了我们数据结构中的背光亮度在值,但是这样做是不够的,因为我们最终要控制的是硬件,所以看下之后我们调用了backlight_update_status函数,ok,看下这个函数的定义:
/include/linux/backlight.h
[cpp]
view plaincopyprint?
static inline void backlight_update_status(struct backlight_device *bd) { mutex_lock(&bd->update_lock); if (bd->ops && bd->ops->update_status) bd->ops->update_status(bd); mutex_unlock(&bd->update_lock); }
static inline void backlight_update_status(struct backlight_device *bd)
{
mutex_lock(&bd->update_lock);
if (bd->ops && bd->ops->update_status)
bd->ops->update_status(bd);
mutex_unlock(&bd->update_lock);
}看下这个内联函数,看到ops就知道了吧,这边调用了bd->ops->update_status这里就调用到了我们自己写的update_status回调函数:
[cpp]
view plaincopyprint?
static const struct backlight_ops android_backlight_ops = { .update_status = android_backlight_update_status, .get_brightness = android_backlight_get_brightness, // .check_fb... };
static const struct backlight_ops android_backlight_ops = {
.update_status = android_backlight_update_status,
.get_brightness = android_backlight_get_brightness,
// .check_fb...
};[cpp]
view plaincopyprint?
static int android_backlight_update_status(struct backlight_device *bl)
{
struct android_pwm_data *pd = dev_get_drvdata(&bl->dev);
int brightness = bl->props.brightness;
int max=bl->props.max_brightness;
/* if (bl->props.power != FB_BLANK_UNBLANK)
brightness = 0;
if (bl->props.fb_blank != FB_BLANK_UNBLANK)
brightness = 0;
*/
printk(KERN_INFO "update brightness...\n");
if (pd->notify)
brightness = pd->notify(pd->dev, brightness);
//+++add
global_brightness = brightness;
// complete(&priv_event);
printk(KERN_INFO "complete event....\n");
return 0;
}
static int android_backlight_update_status(struct backlight_device *bl)
{
struct android_pwm_data *pd = dev_get_drvdata(&bl->dev);
int brightness = bl->props.brightness;
int max=bl->props.max_brightness;
/* if (bl->props.power != FB_BLANK_UNBLANK)
brightness = 0;
if (bl->props.fb_blank != FB_BLANK_UNBLANK)
brightness = 0;
*/
printk(KERN_INFO "update brightness...\n");
if (pd->notify)
brightness = pd->notify(pd->dev, brightness);
//+++add
global_brightness = brightness;
// complete(&priv_event);
printk(KERN_INFO "complete event....\n");
return 0;
}这里咱也没做什么,因为android模拟器没有真正的背光的设备,我们打印了信息,还有就是一个notify回调函数,这里我们也没有实现,这里我猜想就是这边背光如果涉及到别的deivce的行为的话,这个notify函数可以通知到别的设备。
ok,这边就介绍结束了,我们来启动我们的android模拟器来看下sysfs中backlight下我们自己的节点。
大家可以看到我们自己的device的文件系统,我们cat 出来的brightness就是我们在board-goldfish.c中设置的初始值。
=====================================================
OK,这部分就介绍到这,下面一篇会介绍到我们HAL层中是如何封装我们driver中的接口的。

相关文章推荐
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux .
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux
- Android模拟器学framework和driver之battery & backlight-----7. backlight in jni
- Android模拟器学framework和driver之battery & backlight-----8. backlight in framework
- Android模拟器学framework和driver之battery & backlight-----6. backlight in hal
- Android模拟器学framework和driver之battery & backlight-----7. backlight in jni
- Android模拟器学framework和driver之battery & backlight-----7. backlight in jni .
- Android模拟器学framework和driver之battery & backlight-----8. backlight in framework .
- Android模拟器学framework和driver之battery & backlight-----8. backlight in framework
- Android模拟器学framework和driver之battery & backlight-----6. backlight in hal .
- Android模拟器学framework和driver之battery & backlight-----6. backlight in hal
- Android模拟器学framework和driver之battery & backlight-----1.battery in linux
- Android模拟器学framework和driver之battery & backlight-----1.battery in linux
- Android模拟器学framework和driver之battery & backlight-----1.battery in linux
- Android模拟器学framework和driver之battery & backlight-----2. battery in jni
- Android模拟器学framework和driver之battery & backlight-----3. battery in framework
- Android模拟器学framework和driver之battery & backlight-----2. battery in jni
- Android模拟器学framework和driver之battery & backlight-----2. battery in jni