Kinect for windows 开发入门 九:骨骼数据获取和使用
2013-08-22 20:20
344 查看
背景知识
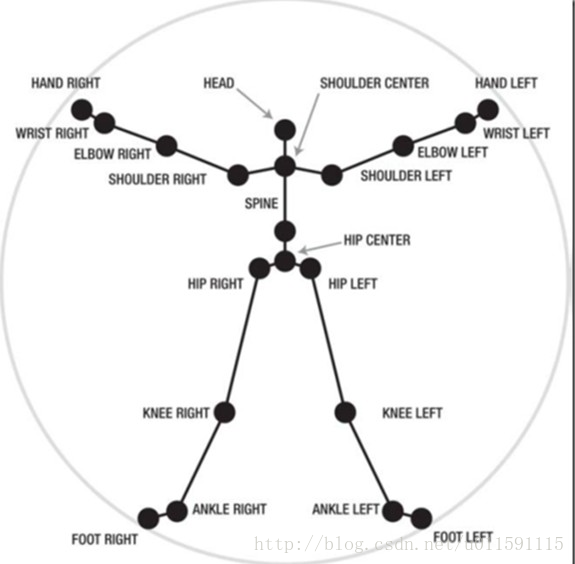
1. 骨骼追踪:骨骼追踪技术通过处理景深数据来建立人体各个关节的坐标,骨骼追踪能够确定人体的各个部分,如那部分是手,头部,以及身体。在Kinect里面,是通过20个关节点来表示一个骨架的,具体由下图可以看到。当你走进Kinect的视野范围的时候,Kinect就可以把你的20个关节点的位置找到(当然你得站着),位置通过(x,
y, z)坐标来表示。SkeletonStream产生的每一帧数据都是一个骨骼对象集合。每一个骨骼对象包含有描述骨骼位置以及骨骼关节的数据。每一个关节有一个唯一标示符如头(head)、肩(shoulder)、肘(dlbow)等信息和3D向量数据。
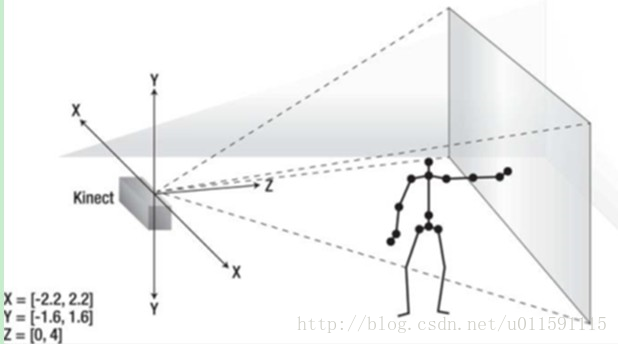
2. 关节坐标:玩家的各关节点位置用(x, y, z)坐标表示。与深度图像空间坐标不同的是,这些坐标单位是米。坐标轴x,y,z是深度感应器实体的空间x, y, z坐标轴。这个坐标系是右手螺旋的,Kinect感应器处于原点上,z坐标轴则与Kinect感应的朝向一致。y轴正半轴向上延伸,x轴正半轴(从Kinect感应器的视角来看)向左延伸,如下图所示。为了方便讨论,我们称这些坐标的表述为关节坐标。如图所示,每个轴的取值都是有范围的。需要注意的是,这里的Y轴不一定是与地面垂直的。
3. Kinect一代最多可以跟踪两个骨骼,可以最多检测六个人(仅位置)。站立模式可以跟踪20个关节点,坐着的模式的话,可以跟踪10个关节点。二代有所改进,可以跟踪7个人的骨骼。
4. Kinect能够追踪到的骨骼数量是一个常量。这使得我们在整个应用程序中能够一次性的为数组分配内存。
5. 通过Kinect获取的每一帧skeletonFrame有好与不好之分。你的姿势、是否有阻挡等等情况,都会影响跟踪的质量。所以在处理之前需要判断一下是否是一个追踪好的骨骼,可以使用Skeleton对象的TrackingState属性来判断,只有骨骼追踪引擎追踪到的骨骼我们才进行处理,忽略哪些不是游戏者的骨骼信息即过滤掉那些TrackingState不等于SkeletonTrackingState.Tracked的骨骼数据。
6. 深度数据或者影像数据用像素来表示,X,Y位置从左上角以0开始。深度数据的Z方位数据以毫米为单位。
代码演示
1. 获取节点位置信息
using (SkeletonFrame
frame =e.OpenSkeletonFrame())
{
if (frame ==null)
{
return;
}
frame.CopySkeletonDataTo(this.frameSkeletons);
foreach (Skeleton
skeleton inthis.frameSkeletons)
{
if (skeleton.TrackingState ==SkeletonTrackingState.Tracked)
{
SetEllipsePostion(headEllipse, skeleton.Joints[JointType.Head].Position);
SetEllipsePostion(handLeftEllipse, skeleton.Joints[JointType.HandLeft].Position);
SetEllipsePostion(handRightEllipse,skeleton.Joints[JointType.HandRight].Position);
SetEllipsePostion(footLeftEllipse, skeleton.Joints[JointType.FootLeft].Position);
SetEllipsePostion(footRightEllipse, skeleton.Joints[JointType.FootRight].Position);
SetEllipsePostion(hipCenterElipse, skeleton.Joints[JointType.HipCenter].Position);
}
}
}
2. 显示节点位置
privatevoid SetEllipsePostion(FrameworkElementellipse,SkeletonPoint
skeletonPoint)
{
DepthImagePoint point =this.Kinect.MapSkeletonPointToDepth(skeletonPoint,this.Kinect.DepthStream.Format);
point.X= (int)((double)point.X
* this.LayoutRoot.ActualWidth /this.Kinect.DepthStream.FrameWidth);
point.Y= (int)((double)point.Y
* this.LayoutRoot.ActualHeight /this.Kinect.DepthStream.FrameHeight);
Canvas.SetLeft(ellipse,point.X);
Canvas.SetTop(ellipse, point.Y);
}
效果演示
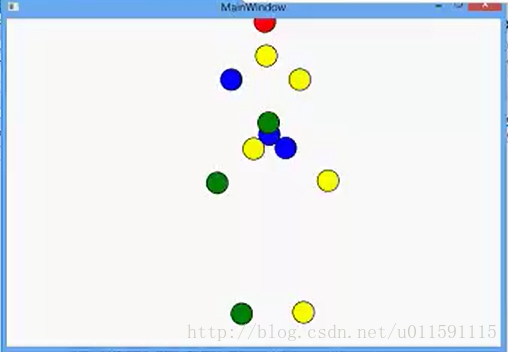
1. 节点捕获
如图显示了上面代码所写的六个节点。
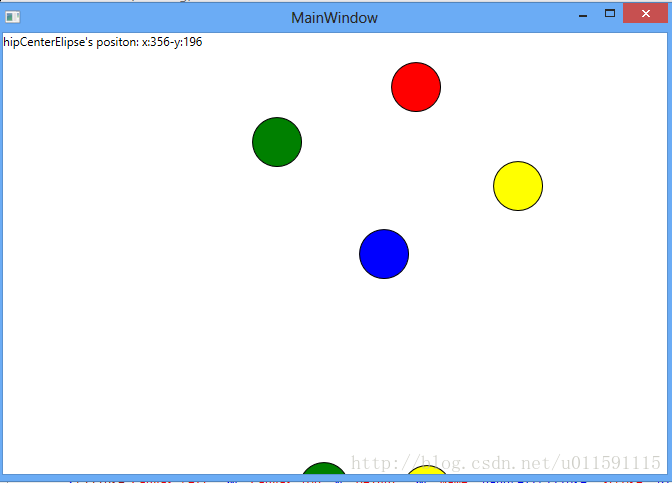
全身重要节点
越来越好玩了。下集做个游戏吧。
1. 骨骼追踪:骨骼追踪技术通过处理景深数据来建立人体各个关节的坐标,骨骼追踪能够确定人体的各个部分,如那部分是手,头部,以及身体。在Kinect里面,是通过20个关节点来表示一个骨架的,具体由下图可以看到。当你走进Kinect的视野范围的时候,Kinect就可以把你的20个关节点的位置找到(当然你得站着),位置通过(x,
y, z)坐标来表示。SkeletonStream产生的每一帧数据都是一个骨骼对象集合。每一个骨骼对象包含有描述骨骼位置以及骨骼关节的数据。每一个关节有一个唯一标示符如头(head)、肩(shoulder)、肘(dlbow)等信息和3D向量数据。
2. 关节坐标:玩家的各关节点位置用(x, y, z)坐标表示。与深度图像空间坐标不同的是,这些坐标单位是米。坐标轴x,y,z是深度感应器实体的空间x, y, z坐标轴。这个坐标系是右手螺旋的,Kinect感应器处于原点上,z坐标轴则与Kinect感应的朝向一致。y轴正半轴向上延伸,x轴正半轴(从Kinect感应器的视角来看)向左延伸,如下图所示。为了方便讨论,我们称这些坐标的表述为关节坐标。如图所示,每个轴的取值都是有范围的。需要注意的是,这里的Y轴不一定是与地面垂直的。
3. Kinect一代最多可以跟踪两个骨骼,可以最多检测六个人(仅位置)。站立模式可以跟踪20个关节点,坐着的模式的话,可以跟踪10个关节点。二代有所改进,可以跟踪7个人的骨骼。
4. Kinect能够追踪到的骨骼数量是一个常量。这使得我们在整个应用程序中能够一次性的为数组分配内存。
5. 通过Kinect获取的每一帧skeletonFrame有好与不好之分。你的姿势、是否有阻挡等等情况,都会影响跟踪的质量。所以在处理之前需要判断一下是否是一个追踪好的骨骼,可以使用Skeleton对象的TrackingState属性来判断,只有骨骼追踪引擎追踪到的骨骼我们才进行处理,忽略哪些不是游戏者的骨骼信息即过滤掉那些TrackingState不等于SkeletonTrackingState.Tracked的骨骼数据。
6. 深度数据或者影像数据用像素来表示,X,Y位置从左上角以0开始。深度数据的Z方位数据以毫米为单位。
代码演示
1. 获取节点位置信息
using (SkeletonFrame
frame =e.OpenSkeletonFrame())
{
if (frame ==null)
{
return;
}
frame.CopySkeletonDataTo(this.frameSkeletons);
foreach (Skeleton
skeleton inthis.frameSkeletons)
{
if (skeleton.TrackingState ==SkeletonTrackingState.Tracked)
{
SetEllipsePostion(headEllipse, skeleton.Joints[JointType.Head].Position);
SetEllipsePostion(handLeftEllipse, skeleton.Joints[JointType.HandLeft].Position);
SetEllipsePostion(handRightEllipse,skeleton.Joints[JointType.HandRight].Position);
SetEllipsePostion(footLeftEllipse, skeleton.Joints[JointType.FootLeft].Position);
SetEllipsePostion(footRightEllipse, skeleton.Joints[JointType.FootRight].Position);
SetEllipsePostion(hipCenterElipse, skeleton.Joints[JointType.HipCenter].Position);
}
}
}
2. 显示节点位置
privatevoid SetEllipsePostion(FrameworkElementellipse,SkeletonPoint
skeletonPoint)
{
DepthImagePoint point =this.Kinect.MapSkeletonPointToDepth(skeletonPoint,this.Kinect.DepthStream.Format);
point.X= (int)((double)point.X
* this.LayoutRoot.ActualWidth /this.Kinect.DepthStream.FrameWidth);
point.Y= (int)((double)point.Y
* this.LayoutRoot.ActualHeight /this.Kinect.DepthStream.FrameHeight);
Canvas.SetLeft(ellipse,point.X);
Canvas.SetTop(ellipse, point.Y);
}
效果演示
1. 节点捕获
如图显示了上面代码所写的六个节点。
全身重要节点
越来越好玩了。下集做个游戏吧。

相关文章推荐
- Kinect for windows 开发入门 八:景深数据获取和使用 下
- Kinect for windows 开发入门 五:彩色数据获取和使用
- Kinect for windows 开发入门 十:语音数据的获取和使用
- Kinect for windows 开发入门 七:景深数据获取和使用 上
- [译]Kinect for Windows SDK开发入门(八):骨骼追踪进阶 上
- Kinect for Windows SDK开发入门(六):骨骼追踪基础 上
- Kinect for Windows SDK开发入门(七):骨骼追踪基础 下
- [译]Kinect for Windows SDK开发入门(八):骨骼追踪进阶 上
- Kinect for Windows SDK开发入门(七):骨骼追踪基础 下
- ]Kinect for Windows SDK开发入门(六):骨骼追踪基础 上
- Kinect for Windows SDK开发入门(七):骨骼追踪基础 下
- [译]Kinect for Windows SDK开发入门(六):骨骼追踪基础 上
- [译]Kinect for Windows SDK开发入门(七):骨骼追踪基础 下
- [译]Kinect for Windows SDK开发入门(九):骨骼追踪进阶 下
- Kinect for Windows SDK开发入门(九):骨骼追踪进阶 下
- Kinect for Windows SDK开发入门(七):骨骼追踪基础 下
- Kinect for Windows SDK开发入门(六):骨骼追踪基础 上
- [译]Kinect for Windows SDK开发入门(六):骨骼追踪基础 上
- Kinect for Windows SDK开发入门(九):骨骼追踪进阶 下
- Kinect for Windows SDK开发入门(八):骨骼追踪进阶 上