CORDIC的硬件算法实现(摘录整理)
2011-07-11 21:05
302 查看
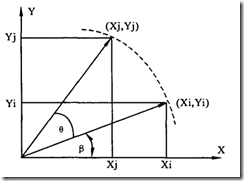
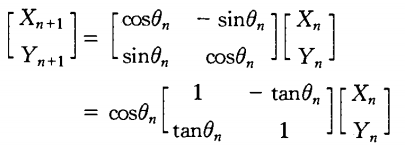
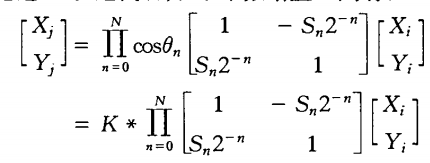
该系统完成的是一个平面坐标旋转如图 1所示,可以看出,将向量(X i ,Y i ) 旋转

角,得到一个新的向量
( Xj,Yj)。

将Rcos()展开
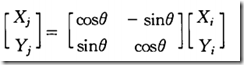
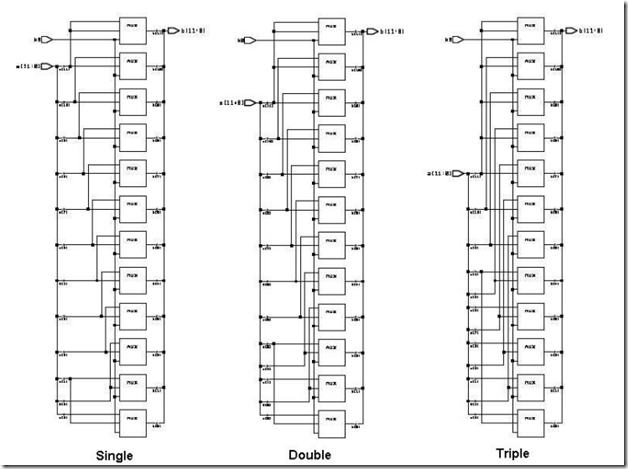
矩阵形式
硬件上用乘除法很耗资源,未来节省资源采用这样的思路:最常用的代替乘法的方式是移位运算
来看下把这乘法最终转换为移位的思路:
移位运算只能做乘除2. 但这些运算组合可形成大的乘除法
将要旋转的角度分解,每次完成一小块,多次后就可逼近角度值
分解(逼近)方式入下:

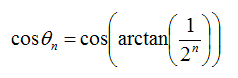
其中的第n次旋转过程
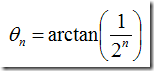
第n次的旋转角度必须是这个(n为任意值)(arctan(1)= 45度)

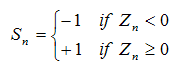
Sn为符号(-,+)

,各种

组合成

(即真正要旋转的角度)
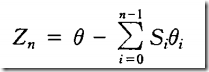
Zn为未旋转的角度
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

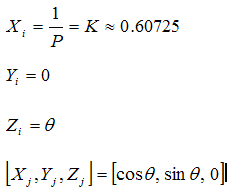
先看下如何消去



随着迭代的增加他将收敛与常数K(或1/P),故可用预先计算来消除.


··········································································································································································
未旋转的角度减少到0,用伪代码表示为
For n=0 to [inf]
If (Z(n) >= 0) then
Z(n + 1) := Z(n) – atan(1/2^n);
Else
Z(n + 1) := Z(n) + atan(1/2^n);
End if;
End for;
预先计算好arctan(1/2^n)的值,形成查找表的形式,[inf]为需要的迭代次数,每一位需要1次(16轮的迭代将产生16位的结果),如果加入X,Y的计算,用伪代码的表示如下:
For n=0 to [inf]
If (Z(n) >= 0) then
X(n + 1) := X(n) – (Yn/2^n);
Y(n + 1) := Y(n) + (Xn/2^n);
Z(n + 1) := Z(n) – atan(1/2^n);
Else
X(n + 1) := X(n) + (Yn/2^n);
Y(n + 1) := Y(n) – (Xn/2^n);
Z(n + 1) := Z(n) + atan(1/2^n);
End if;
End for;
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
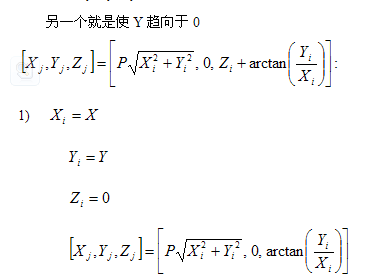
使Z趋向于0

存在以下有趣的情况:

就是把矢量旋转到x轴上,这时候 x的坐标就是矢量的模啦
注意:参数范围

~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
算法硬件实现原理图:
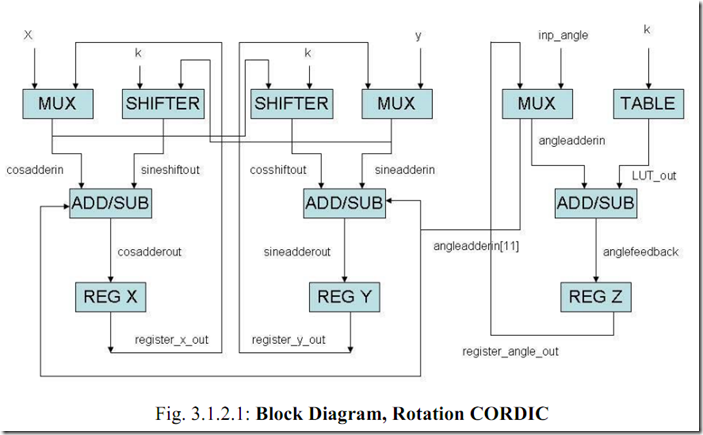
X,Y的输入为最原始的x,y值;k的输入为确定arctan(1/2^k) ;

要旋转的角度
数据最高位为符号位1为负 0为正
···

左移右移k =n来完成·····

~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

···

···



····

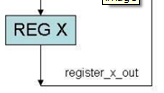
这个反馈回路来完成迭代,一次次小的旋转最终完成大的旋转
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
预先计算好arctan(1/2^k)的值,形成查找表的形式

~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
···



这个回路····· Z(n + 1) := Z(n) +atan(1/2^n);
Z(n + 1) = Z(n) -atan(1/2^n);
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~


判断Z(n),看是加还是减(

?

? )
If (Z(n) >= 0) then
X(n + 1) := X(n) – (Yn/2^n);
Y(n + 1) := Y(n) + (Xn/2^n);
Z(n + 1) := Z(n) – atan(1/2^n);
Else
X(n + 1) := X(n) + (Yn/2^n);
Y(n + 1) := Y(n) – (Xn/2^n);
Z(n + 1) := Z(n) + atan(1/2^n);
End if;
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

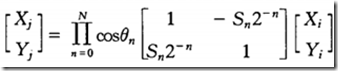
的硬件实现:
先给出RTL的图:

思路:
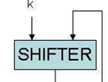
这里k有三位,故整个移位过程分3步进行 即 single ; double; triple
这三部分是将数依次移动 2^0, 2^1, 2^2
实例:
k = 3’b101;
k[0] = 1; 故数右移1*2^0位
k[1] = 0; 故数右移0*2^1位
k[2] = 1; 故数右移1*2^2位

最终右移啦5位
k控制的的选择器
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

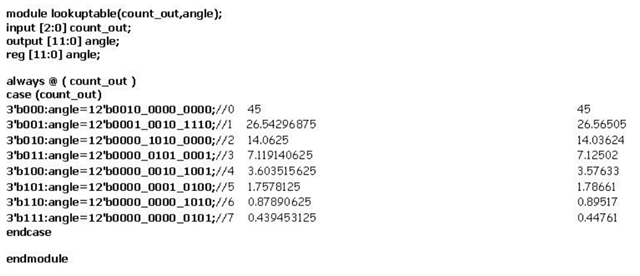
二进制角度表示查找表表 硬件实现
Look-Up Table
这儿用12位2进制数表示角度(bit[11],bit[10]……bit[0])
首先确定12位数与角度的关联:
bit[11] 表示-180度 (1:出现-180;0:不出现-180; 方便与后边的数累加 即可表示-180~ +180的值)
bit[10] 表示+90度
bit[9:0] 表示+90/(2^n)
(n值得确定方式为:
1 为bit[9]
`
`
`
10 为bit[0]
)(其实就是角度减半减半再减半)
verilog 描述:

另外由于旋转因子需要进行0°、-90°或+90°三种预旋转,所以预旋转还要分配两位二进制数,这样存储旋转系数就为12位的
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

硬件实现
12-bit Full Adder
有点像异或门做选择器,呵呵

二进制与1异或 相当于取反 取反后二进制的位置与原先的位置是对称的 故可以此表示-180 ~ +180
当与0异或时 原数不变
当sign = 0 时做加法
当sign = 1 时做减法 (其实是改变后的加法)
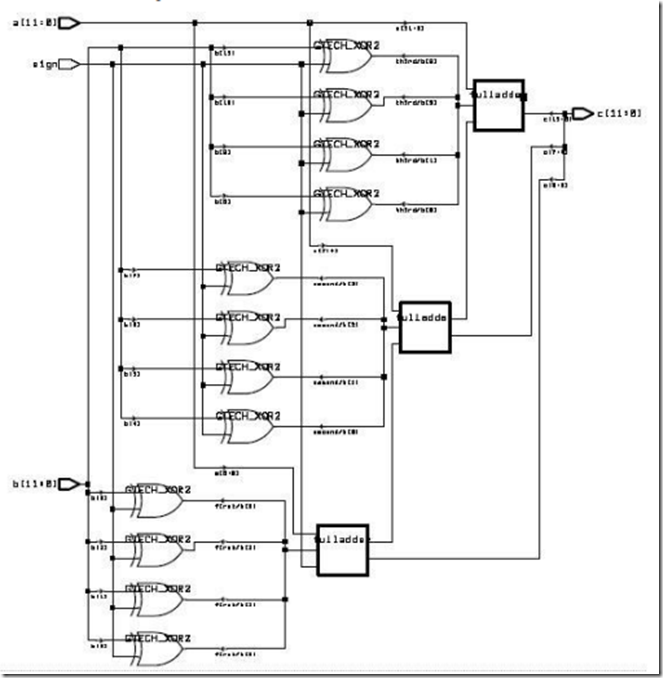

:4 Bit Full Adder
这个4位的全加器就多讲啦

~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
·~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~``
最后:
Vectoring CORDIC 用于计算复数的模
用迭代使Y趋向0 就是将矢量旋转到x轴上 此时x轴坐标就是 矢量的模;
需要注意的是:
在迭代之前要保证矢量在(-90,,90)之间
操作方法是 当矢量在地1,2象限(0,180)是-90度
当矢量在地3,4象限(-180,0)时+90度

参考资料:




角,得到一个新的向量
( Xj,Yj)。


将Rcos()展开

矩阵形式
硬件上用乘除法很耗资源,未来节省资源采用这样的思路:最常用的代替乘法的方式是移位运算
来看下把这乘法最终转换为移位的思路:
移位运算只能做乘除2. 但这些运算组合可形成大的乘除法
将要旋转的角度分解,每次完成一小块,多次后就可逼近角度值
分解(逼近)方式入下:
其中的第n次旋转过程

第n次的旋转角度必须是这个(n为任意值)(arctan(1)= 45度)

Sn为符号(-,+)
,各种

组合成

(即真正要旋转的角度)

Zn为未旋转的角度
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

先看下如何消去


随着迭代的增加他将收敛与常数K(或1/P),故可用预先计算来消除.

··········································································································································································
未旋转的角度减少到0,用伪代码表示为
For n=0 to [inf]
If (Z(n) >= 0) then
Z(n + 1) := Z(n) – atan(1/2^n);
Else
Z(n + 1) := Z(n) + atan(1/2^n);
End if;
End for;
预先计算好arctan(1/2^n)的值,形成查找表的形式,[inf]为需要的迭代次数,每一位需要1次(16轮的迭代将产生16位的结果),如果加入X,Y的计算,用伪代码的表示如下:
For n=0 to [inf]
If (Z(n) >= 0) then
X(n + 1) := X(n) – (Yn/2^n);
Y(n + 1) := Y(n) + (Xn/2^n);
Z(n + 1) := Z(n) – atan(1/2^n);
Else
X(n + 1) := X(n) + (Yn/2^n);
Y(n + 1) := Y(n) – (Xn/2^n);
Z(n + 1) := Z(n) + atan(1/2^n);
End if;
End for;
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
使Z趋向于0

存在以下有趣的情况:
就是把矢量旋转到x轴上,这时候 x的坐标就是矢量的模啦
注意:参数范围
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
算法硬件实现原理图:

X,Y的输入为最原始的x,y值;k的输入为确定arctan(1/2^k) ;

要旋转的角度
数据最高位为符号位1为负 0为正

···

左移右移k =n来完成·····

~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

···

···


····

这个反馈回路来完成迭代,一次次小的旋转最终完成大的旋转
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
预先计算好arctan(1/2^k)的值,形成查找表的形式

~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
···



这个回路····· Z(n + 1) := Z(n) +atan(1/2^n);
Z(n + 1) = Z(n) -atan(1/2^n);
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~


判断Z(n),看是加还是减(

?

? )
If (Z(n) >= 0) then
X(n + 1) := X(n) – (Yn/2^n);
Y(n + 1) := Y(n) + (Xn/2^n);
Z(n + 1) := Z(n) – atan(1/2^n);
Else
X(n + 1) := X(n) + (Yn/2^n);
Y(n + 1) := Y(n) – (Xn/2^n);
Z(n + 1) := Z(n) + atan(1/2^n);
End if;
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
的硬件实现:
先给出RTL的图:

思路:
这里k有三位,故整个移位过程分3步进行 即 single ; double; triple
这三部分是将数依次移动 2^0, 2^1, 2^2
实例:
k = 3’b101;
k[0] = 1; 故数右移1*2^0位
k[1] = 0; 故数右移0*2^1位
k[2] = 1; 故数右移1*2^2位

最终右移啦5位

k控制的的选择器
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

二进制角度表示查找表表 硬件实现
Look-Up Table
这儿用12位2进制数表示角度(bit[11],bit[10]……bit[0])
首先确定12位数与角度的关联:
bit[11] 表示-180度 (1:出现-180;0:不出现-180; 方便与后边的数累加 即可表示-180~ +180的值)
bit[10] 表示+90度
bit[9:0] 表示+90/(2^n)
(n值得确定方式为:
1 为bit[9]
`
`
`
10 为bit[0]
)(其实就是角度减半减半再减半)
verilog 描述:
另外由于旋转因子需要进行0°、-90°或+90°三种预旋转,所以预旋转还要分配两位二进制数,这样存储旋转系数就为12位的
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~

硬件实现
12-bit Full Adder
有点像异或门做选择器,呵呵

二进制与1异或 相当于取反 取反后二进制的位置与原先的位置是对称的 故可以此表示-180 ~ +180
当与0异或时 原数不变
当sign = 0 时做加法
当sign = 1 时做减法 (其实是改变后的加法)


:4 Bit Full Adder
这个4位的全加器就多讲啦

~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
·~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~``
最后:
Vectoring CORDIC 用于计算复数的模
用迭代使Y趋向0 就是将矢量旋转到x轴上 此时x轴坐标就是 矢量的模;
需要注意的是:
在迭代之前要保证矢量在(-90,,90)之间
操作方法是 当矢量在地1,2象限(0,180)是-90度
当矢量在地3,4象限(-180,0)时+90度

参考资料:




相关文章推荐
- 百度登录算法分析和实现(中 - 整理篇)
- FPGA加三移位算法:硬件逻辑实现二进制转BCD码
- 基于FPGA的Cordic算法实现
- 关于RSA硬件算法的实现问题!
- 文本相似度算法的整理和python实现
- 使用RSA非对称密钥算法实现硬件设备授权
- 硬件中的三角函数计算 Cordic算法入门
- 算法整理(二)---快速排序的两种实现方式:双边扫描和单边扫描
- [C++] 测试硬件popcnt(位1计数)指令与各种软件算法,利用模板实现静态多态优化性能
- Cordic算法——verilog实现
- 算法经典面试题整理(java实现)
- FFT算法8点12位硬件实现 (verilog)
- 算法整理(二)---高速排序的两种实现方式:双边扫描和单边扫描
- 韩顺平_PHP程序员玩转算法公开课(第一季)07_使用数组实现堆栈_学习笔记_源代码图解_PPT文档整理
- C/C++经典算法精华整理(3)-实现栈的数据结构
- 基于硬件的ORB特征提取与实现(第一部分)——特征点算法仔细分析
- CRC的校验原理及硬件、软件算法实现
- 算法整理——非对称密钥加密RSA数学相关与简单实现
- 《编程实用算法实现整理》系列技术文章整理收藏
- R语言算法实现整理