A model for the structural, functional, and deontic specification of organizations in multiagent systems
2010-09-20 08:42
731 查看
1. Solved Problem

Figure1 The organization efforts on MAS
P: agents’ behaviors that lead to global purpose
E: agents’ behaviors constrained by the environment
S: agents’ possible/permitted/obliged behaviors structurally constrained by the organization
F: agents’ possible/permitted/obliged behaviors functionally constrained by the organization
If only the functional dimension is specified, the organization has nothing to “tell” to the agents when no plan can be performed;
If only the organizational structure is specified, the agents have to reason for a global plan every time they want to play together. Even with a smaller search space of possible plans, since the structure constrains the agents’ options, this may be a hard problem.
A first attempt to join roles with plans is the MOISE (Model of Organization for multi-agent Systems). The main shortcoming of MOISE, which motivates its extension, is the lack of the concept of an explicit global plan in the model and the strong dependence among the structure and the functioning.
2. How to solve
An MOISE+ OS is formed by a Structural Specification (SS), a Functional Specification (FS), and a Deontic Specification (DS). The objective is an organization centered model where the first two dimensions can be specified almost independently of each other and after properly linked by the deontic dimension.
(1)Structural Specification
Individual level
The individual level is formed by the roles of the organization. A role means a set of constraints that an agent ought to follow when it accepts to enter a group playing that role. These constraints are defined in two ways: in relation to other roles (in the collective structural level) and in a deontic relation to global plans (in the functional dimension).
There is an inheritance relation among roles. If a role

inherits a role ρ (denoted by ρ


), with

,

receives some properties from ρ, and

is a sub-role, or specialization,of ρ.
Social level
links directly constrain the agents and are represented by the predicate link(ρs, ρd, t) where ρs is the link source, ρd is the link destination, and t ∈ {acq, com, aut} is the link type. In case the link type is acq (acquaintance), the agents playing the source role ρs are allowed to have a representation of the agents playing the destination role ρd (ρd agents, in short). In a communication link (t = com), the ρs agents are allowed to communicate with ρd agents. In a authority link (t = aut), the ρs agents are allowed to have authority on ρd agents, i.e., to control them.
link(ρs, ρd, aut) ⇒ link(ρs, ρd, com)
link(ρs, ρd, com) ⇒ link(ρs, ρd, acq)
Regarding the inheritance relation, the links follow the rules:
(link(ρs, ρd, t) ∧ ρs


) ⇒ link(ρ0s, ρd, t)
(link(ρs, ρd, t) ∧ ρd


) ⇒ link(ρs,

, t)
(3)Collective level
This compatibility constraint ρa

ρb states that the agents playing the role ρa are also allowed to play the role ρb. As an example, the team leader role is compatible with the back player role (ρleader

ρback). If it is not specified that two roles are compatible, by default they are not.

a group specification represented by the tuple:

R: the set of not abstract roles that may be played in groups created from gt.
SG: the set of possible sub-groups of a group.
Lintra: intra-group links
Linter: inter-group links
Cintra: intra-group compatibilities, an agent playing the role ρa in a group gr is allowed to also
play the role ρb in the same group gr or in a gr sub-group.
Cinter: inter-group compatibilities, an agent playing ρa in the group gr1 is also allowed to play ρb in other group gr2 (gr1

gr2).
np: The partial function npgt : Rgt

N × N specifies the number (minimum, maximum) of roles that have to be played in the group.
ng: SGgt

N × N specifies the sub-groups cardinality.
The SS of a MAS organization is formed by a set of roles (Rss), a set of root group specifications (which may have their sub-groups, e.g. the group specification team), and the inheritance relation (

) on Rss.
(2)Functional Specification
The FS in MOISE+ is based on the concepts of missions (a set of global goals) and global plans. These two concepts are assembled in a Social Scheme (SCH) which is essentially a goal decomposition tree where the root is the SCH goal and where the responsibilities for the sub-goals are distributed in missions. Each goal may be decomposed in sub-goals through plans which may use three operators: sequence “,”, choice “|”, parallelism “||”.

Fig An example of Social Scheme to score a soccer goal

Table1 Goal descriptions
It is also useful to add a certainty success degree in a plan. the plan “g2 =0.85 g6, (g7 | g8)” achieves g2 with 85% of certainty.
In a SCH, a mission is a set of coherent goals that an agent can commit to.
A Social Scheme is represented by a tuple

G is the set of global goal;
M is the set of mission labels;
P is the set of plans that builds the tree structure;
mo : M → P(G) is a function that specifies the mission set of goals;
nm : M

N × N specifies the number (minimum, maximum) of agents that have to commit to each mission in order to say the SCH is well formed.

It is also possible to define a preference order among the missions. If the FS includes m1 ≺ m2, then the mission m1 has a social preference on the mission m2.
To sum up, the FS is a set of several SCHs and mission preferences which describes how a MAS usually achieves its global goals, i.e., how these goals are decomposed by plans and distributed to the agents by missions.
(3)Deontic Specification
Deontic specification is specified in the individual level as permissions and obligations of a role on a mission.
A permission per(ρ,m, tc) states that an agent playing the role ρ is allowed to commit to the mission m, and tc is a time constraint on the permission, i.e., it specifies a set of periods during which this permission is valid.
an obligation obl(ρ,m, tc) states that an agent playing ρ ought to commit to m in the periods listed in tc. These two predicates have the following properties: if an agent is obligated to a mission it is also permitted to this mission.
obl(ρ,m, tc) ⇒ per(ρ,m, tc)
obl(ρ,m, tc) ∧ρ


⇒ obl(

,m, tc)
per(ρ,m, tc) ∧ρ


⇒ per(

,m, tc)
参考文献:
[1] J Hübner, J Sichman, O Boissier. A model for the structural, functional, and deontic specification of organizations in multiagent systems. Advances in Artificial Intelligence, 2002.
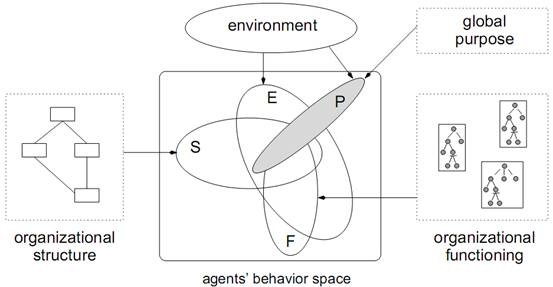
Figure1 The organization efforts on MAS
P: agents’ behaviors that lead to global purpose
E: agents’ behaviors constrained by the environment
S: agents’ possible/permitted/obliged behaviors structurally constrained by the organization
F: agents’ possible/permitted/obliged behaviors functionally constrained by the organization
If only the functional dimension is specified, the organization has nothing to “tell” to the agents when no plan can be performed;
If only the organizational structure is specified, the agents have to reason for a global plan every time they want to play together. Even with a smaller search space of possible plans, since the structure constrains the agents’ options, this may be a hard problem.
A first attempt to join roles with plans is the MOISE (Model of Organization for multi-agent Systems). The main shortcoming of MOISE, which motivates its extension, is the lack of the concept of an explicit global plan in the model and the strong dependence among the structure and the functioning.
2. How to solve
An MOISE+ OS is formed by a Structural Specification (SS), a Functional Specification (FS), and a Deontic Specification (DS). The objective is an organization centered model where the first two dimensions can be specified almost independently of each other and after properly linked by the deontic dimension.
(1)Structural Specification
Individual level
The individual level is formed by the roles of the organization. A role means a set of constraints that an agent ought to follow when it accepts to enter a group playing that role. These constraints are defined in two ways: in relation to other roles (in the collective structural level) and in a deontic relation to global plans (in the functional dimension).
There is an inheritance relation among roles. If a role

inherits a role ρ (denoted by ρ


), with

,

receives some properties from ρ, and

is a sub-role, or specialization,of ρ.
Social level
links directly constrain the agents and are represented by the predicate link(ρs, ρd, t) where ρs is the link source, ρd is the link destination, and t ∈ {acq, com, aut} is the link type. In case the link type is acq (acquaintance), the agents playing the source role ρs are allowed to have a representation of the agents playing the destination role ρd (ρd agents, in short). In a communication link (t = com), the ρs agents are allowed to communicate with ρd agents. In a authority link (t = aut), the ρs agents are allowed to have authority on ρd agents, i.e., to control them.
link(ρs, ρd, aut) ⇒ link(ρs, ρd, com)
link(ρs, ρd, com) ⇒ link(ρs, ρd, acq)
Regarding the inheritance relation, the links follow the rules:
(link(ρs, ρd, t) ∧ ρs


) ⇒ link(ρ0s, ρd, t)
(link(ρs, ρd, t) ∧ ρd


) ⇒ link(ρs,

, t)
(3)Collective level
This compatibility constraint ρa

ρb states that the agents playing the role ρa are also allowed to play the role ρb. As an example, the team leader role is compatible with the back player role (ρleader

ρback). If it is not specified that two roles are compatible, by default they are not.

a group specification represented by the tuple:

R: the set of not abstract roles that may be played in groups created from gt.
SG: the set of possible sub-groups of a group.
Lintra: intra-group links
Linter: inter-group links
Cintra: intra-group compatibilities, an agent playing the role ρa in a group gr is allowed to also
play the role ρb in the same group gr or in a gr sub-group.
Cinter: inter-group compatibilities, an agent playing ρa in the group gr1 is also allowed to play ρb in other group gr2 (gr1

gr2).
np: The partial function npgt : Rgt

N × N specifies the number (minimum, maximum) of roles that have to be played in the group.
ng: SGgt

N × N specifies the sub-groups cardinality.
The SS of a MAS organization is formed by a set of roles (Rss), a set of root group specifications (which may have their sub-groups, e.g. the group specification team), and the inheritance relation (

) on Rss.
(2)Functional Specification
The FS in MOISE+ is based on the concepts of missions (a set of global goals) and global plans. These two concepts are assembled in a Social Scheme (SCH) which is essentially a goal decomposition tree where the root is the SCH goal and where the responsibilities for the sub-goals are distributed in missions. Each goal may be decomposed in sub-goals through plans which may use three operators: sequence “,”, choice “|”, parallelism “||”.
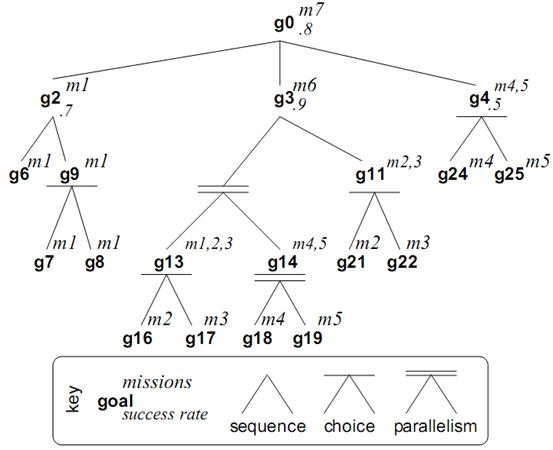
Fig An example of Social Scheme to score a soccer goal
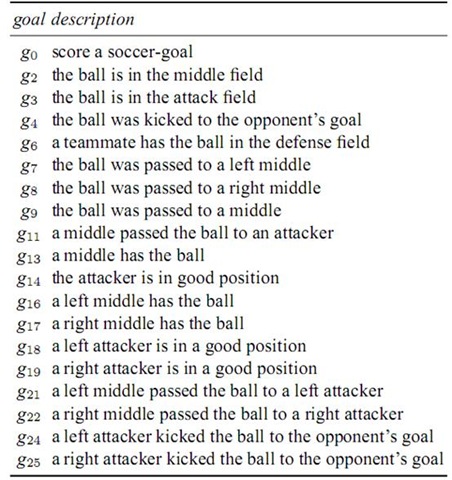
Table1 Goal descriptions
It is also useful to add a certainty success degree in a plan. the plan “g2 =0.85 g6, (g7 | g8)” achieves g2 with 85% of certainty.
In a SCH, a mission is a set of coherent goals that an agent can commit to.
A Social Scheme is represented by a tuple

G is the set of global goal;
M is the set of mission labels;
P is the set of plans that builds the tree structure;
mo : M → P(G) is a function that specifies the mission set of goals;
nm : M

N × N specifies the number (minimum, maximum) of agents that have to commit to each mission in order to say the SCH is well formed.

It is also possible to define a preference order among the missions. If the FS includes m1 ≺ m2, then the mission m1 has a social preference on the mission m2.
To sum up, the FS is a set of several SCHs and mission preferences which describes how a MAS usually achieves its global goals, i.e., how these goals are decomposed by plans and distributed to the agents by missions.
(3)Deontic Specification
Deontic specification is specified in the individual level as permissions and obligations of a role on a mission.
A permission per(ρ,m, tc) states that an agent playing the role ρ is allowed to commit to the mission m, and tc is a time constraint on the permission, i.e., it specifies a set of periods during which this permission is valid.
an obligation obl(ρ,m, tc) states that an agent playing ρ ought to commit to m in the periods listed in tc. These two predicates have the following properties: if an agent is obligated to a mission it is also permitted to this mission.
obl(ρ,m, tc) ⇒ per(ρ,m, tc)
obl(ρ,m, tc) ∧ρ


⇒ obl(

,m, tc)
per(ρ,m, tc) ∧ρ


⇒ per(

,m, tc)
参考文献:
[1] J Hübner, J Sichman, O Boissier. A model for the structural, functional, and deontic specification of organizations in multiagent systems. Advances in Artificial Intelligence, 2002.

相关文章推荐
- A meta-model for the analysis and design of organizations in multi-agent systems
- Get the content of an Iframe in Javascript – crossbrowser solution for both IE and Firefox
- Design and Model Analysis of the E-Commerce Development Platform for 3-Tiered Web Applications
- Get the content of an Iframe in Javascript – crossbrowser solution for both IE and Firefox
- Get the content of an Iframe in Javascript – crossbrowser solution for both IE and Firefox
- [论文笔记] Leveraging the crowd as a source of innovation Does crowdsourcing represent a new model for product and service innovation? (SIGMIS-CPR, 2012)
- 读论文《The perceptron: A probabilistic model for information storage and organization in the brain》
- sql: Query to Display Foreign Key Relationships and Name of the Constraint for Each Table in Database
- TACAS(International Conference on Tools and Algorithms for the Construction and Analysis of Systems)到底是什么档次的会议?
- Methodologies and Software Engineering for Agent Systems: The Agent-Oriented Software Engineering Ha
- METHODS OF AND APPARATUS FOR USING TEXTURES IN GRAPHICS PROCESSING SYSTEMS
- The article discusses a couple of new features introduced for assemblies and versioning in Visual Studio 2005.
- Question 12: In C++, which of the following is the best declaration for an overloaded operator[] to allow read-only access (and
- The Laws of Software Process: A New Model for the Production and Management of Software
- The Ubuntu Dialogue Corpus- A Large Dataset for Research in Unstructured Multi-Turn Dialogue Systems
- TACAS(International Conference on Tools and Algorithms for the Construction and Analysis of Systems)到底是什么档次的会议?
- The Difference of Class.forName()、Class.forName().newInstance() and New in Java
- Get the content of an Iframe in Javascript – crossbrowser solution for both IE and Firefox
- Get the content of an Iframe in Javascript – crossbrowser solution for both IE and Firefox
- Design and Model Analysis of the E-Commerce Development Platform for 3-Tiered Web Applications