RTThread 重定义rt_hw_console_output函数
2022-06-06 15:50
4870 查看
在学习单片机时,我们会经常使用printf函数进行信息输出,方便调试程序,而学习RT-Thread时也会经常使用rt_kprintf函数进行信息输出,所以在移植完RT-Thread时,我们首先需要定义rt_hw_console_output使得rt_kprintf函数能正常运行
一、初始化UART
rt_kprintf函数最终都是通过串口进行日志打印的,所以在使用之前需要对uart外设进行初始化。下面是STM32F10x的初始化程序:
void USART1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 使能 USART1 时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* USART1 使用IO端口配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA
/* USART1 工作模式配置 */
USART_InitStructure.USART_BaudRate = 115200; //波特率设置:115200
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位数设置:8位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位设置:1位
USART_InitStructure.USART_Parity = USART_Parity_No ; //是否奇偶校验:无
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制模式设置:没有使能
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//接收与发送都使能
USART_Init(USART1, &USART_InitStructure); //初始化USART1
USART_Cmd(USART1, ENABLE);// USART1使能
}
**注意:**需要在board.c文件中的rt_hw_board_init()函数中进行初始化程序的调用,因为在完成RT-Thread的启动后(也就是在main函数运行之前)会打印相应的启动信息,如果放在mian函数中进行串口的初始化,会使程序跑飞。
二、rt_kprintf输出的两种方式
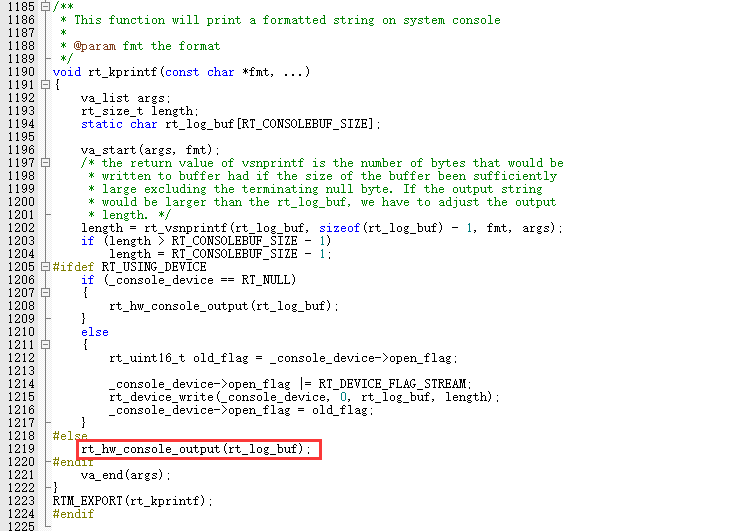
rt_kprintf()支持两种方式的输出,一种是当使用设备驱动时,将设备将作为控制台;另外一种是当没有使用设备驱动时,系统通过rt_hw_console_output()函数处理rt_kprintf()输出的设备。从下面的代码可以看出两种输出方式的使用
 **注意:**想要使用控制台时(或者rt_kprintf()时),需要使能RT_USING_CONSOLE,使能方式是在rtconfig.h文件中添加如下代码
**注意:**想要使用控制台时(或者rt_kprintf()时),需要使能RT_USING_CONSOLE,使能方式是在rtconfig.h文件中添加如下代码
#ifdef RT_USING_CONSOLE
三、自定义 rt_hw_console_output()
rt_hw_console_output()在哪里实现都是可以的,我是在自己编写的drv_usart.c文件中实现的,程序如下所示:
#ifdef RT_USING_CONSOLEvoid rt_hw_console_output( const char *str )
{
/* 进入临界段 */
rt_enter_critical();
/* 直到字符串结束 */
while ( *str != '\0' )
{
// 换行
if ( *str == '\n')
{
USART_SendData(DEBUG_USARTx, '\r');
while(USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
}
USART_SendData(DEBUG_USARTx, *str++);
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
}
/* 退出临界段 */
rt_exit_critical();
}
#endif
四、drv_usart.c文件
/***************************************
* 文件名 :usart1.c
* 描述 :配置USART1
* 实验平台:MINI STM32开发板 基于STM32F103C8T6
* 硬件连接:------------------------
* | PA9 - USART1(Tx) |
* | PA10 - USART1(Rx) |
* ------------------------
**********************************************************************************/
#include "drv_usart.h"
#include <stdarg.h>
#include "misc.h"
#include <stdio.h>
#include <rtthread.h>
#define DEBUG_USARTx USART1
void USART1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 使能 USART1 时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* USART1 使用IO端口配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA
/* USART1 工作模式配置 */
USART_InitStructure.USART_BaudRate = 115200; //波特率设置:115200
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //数据位数设置:8位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位设置:1位
USART_InitStructure.USART_Parity = USART_Parity_No ; //是否奇偶校验:无
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制模式设置:没有使能
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//接收与发送都使能
USART_Init(USART1, &USART_InitStructure); //初始化USART1
USART_Cmd(USART1, ENABLE);// USART1使能
}#ifdef RT_USING_CONSOLEvoid rt_hw_console_output( const char *str )
{
/* 进入临界段 */
rt_enter_critical();
/* 直到字符串结束 */
while ( *str != '\0' )
{
// 换行
if ( *str == '\n')
{
USART_SendData(DEBUG_USARTx, '\r');
while(USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
}
USART_SendData(DEBUG_USARTx, *str++);
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
}
/* 退出临界段 */
rt_exit_critical();
}
#endif
五、下载测试

六参考文献
重映射串口到 rt_kprintf 函数(学习笔记):https://blog.csdn.net/weixin_43772810/article/details/123652008

相关文章推荐
- RT-thread内核之系统时钟
- Ubuntu14安装rt-thread开发环境
- RT-Thread 05内存管理
- RT-Thread 学习笔记(十三)--- 开启基于RTGUI的LCD显示功能(3)<触屏屏驱动移植和测试>
- RT-Thread学习笔记(1)
- RT-Thread 学习笔记(四)——添加RTGUI组件
- RT_thread 学习笔记2——TCP/IP协议栈(LwIP)
- PHP再学习3——RT Thread + LwIP提交表单,文本保存数据
- rt-thread的位图调度算法分析
- RT-Thread移植到STM32F103ZET6具体操作步骤(利用keil5新建工程,添加RT-Thread源码到工程)
- RT-Thread finsh源码分析: finsh_heap.h
- RT-Thread finsh源码分析: finsh_node.c
- RTThread-笔记0用法拾遗和注意点
- RT_Thread的测试框架使用及分析
- RT-thread 利用Scons 工具编译提示python编码错误解决办法
- RT-Thread 内存泄漏分析利器 memtrace+ramdump
- rt-thread/include/libc/libc_stat.h:14:22: fatal error: sys/stat.h: No such file or directory
- 为RT-Thread实现一个傻瓜式的工程向导工具(二)
- RT-Thread "rt_thread_mdelay"函数找不到?
- RT-Thread的CPU使用率计算