四足机器人不同步态的特点(笔记5/作业5)
2020-07-13 05:46
113 查看
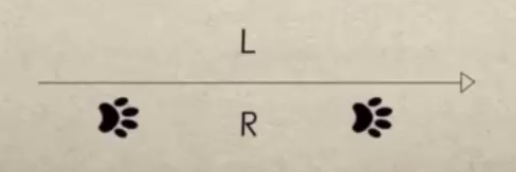
1.Walk行走
#稳定:三个脚掌支撑地面,构成了一个三角形。
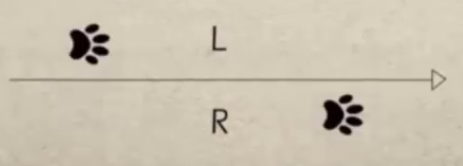
2.Amble缓行
为walk步态的加速

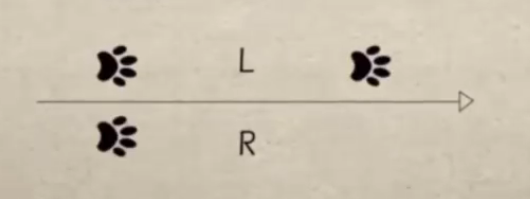
3.Pace踱步
#稳定性较差:同侧脚来回切换
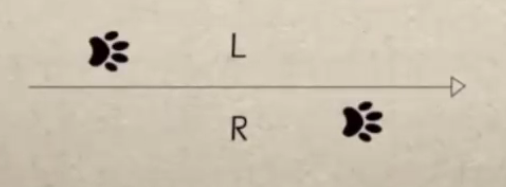
4.Trot小跑
#稳定性和速度兼具:腿成对角线的方式切换
5.Canter慢跑
会有一段腾空的时间
6.Gallup/Run奔跑
注:图片来自动物步态可视化-孔令远
(此外,如有错误,欢迎指出,非常感谢!)

相关文章推荐
- 四足机器人小跑步态程序(笔记6)
- 四足机器人 3.基于虚拟模型的动步态规划方法
- 作业(给不同用户设置不同的权限)
- [javase学习笔记]-7.8 static关键字之特点
- Oracle与其他数据库的不同(笔记)
- 深度学习第三课 结构化机器学习项目 第一周机器学习策略(一) 笔记和作业
- IOS 学习笔记 Button引发不同UIAlertView 事件
- Android 学习笔记五:支持不同的设备
- oracle 数据操作、数据库对象、表、约束、视图、序列、索引、同义词学习笔记和练习题答案、课后作业
- 数据类型和抽象数据类型是如何定义的。二者有何相同和不同之处,抽象数据类型的主要特点是什么?使用抽象数据类型的主要好处是什么?
- linux下的ftp配置多个用户对应不同的目录的工作笔记2013052402
- javascript基本包装类型学习笔记之----基本包装类型的基本特点
- javascript笔记:javascript里面不同function定义的区别
- 笔记:Android判断版本并根据版本使用不同的代码以及旧版本XML问题
- 接口的作业笔记
- 作业5.在不同平台上编写hello world程序_064121陶源
- 【MOOC-浙江大学-陈越、何钦铭-数据结构】数据结构与算法的基本概念(第一周的笔记和编程作业)
- 仿人机器人的跑步研究学习笔记3之机器人腾空后触地减震的方法
- 12.4课堂笔记及作业
- 5.8笔记+day12作业