信号与系统(Python) 学习笔记 (8.1) 离散系统z域分析 -- 系统函数 H(z)
文章目录
8.2. 系统函数 H(z)
8.2.1. 系统函数 H(z) 定义
- 定义:
F(z)→H(z)x=0→Yf(z)F(z) \to \boxed{\underset{x=0}{H(z)}} \to Y_f(z)F(z)→x=0H(z)→Yf(z)
H(z)=Yzs(z)F(z)H(z) = \frac{Y_{zs}(z)}{F(z)}H(z)=F(z)Yzs(z)
- 物理含义:
h(k)↔H(z)=∑k=0∞h(k)z−kh(k) \leftrightarrow H(z) = \sum^{\infty}_{k=0} h(k) z^{-k}h(k)↔H(z)=k=0∑∞h(k)z−k
H(z)=Z[h(k)]H(z) = \mathcal{Z}[h(k)]H(z)=Z[h(k)]
-
计算方法:
-
H(z)=Yzs(z)F(z)H(z) = \frac{Y_{zs}(z)}{F(z)}H(z)=F(z)Yzs(z)
- H(z)=Z[h(k)]H(z) = \mathcal{Z}[h(k)]H(z)=Z[h(k)]
- 由系统差分方程求 H(z)H(z)H(z)
-
应用:
-
求 yzs(k)=Z[Yzs(z)], Yzs(z)=H(z)F(z)y_{zs}(k) = \mathcal{Z}[Y_{zs}(z)],\; Y_{zs}(z)= H(z)F(z)yzs(k)=Z[Yzs(z)],Yzs(z)=H(z)F(z) ;
- 求 h(z)=Z−1[H(z)]h(z)= \mathcal{Z}^{-1}[H(z)]h(z)=Z−1[H(z)] ;
- 求 f(k)=Z−1[F(z)], F(z)=Yzs(z)H(z)f(k) = \mathcal{Z}^{-1}[F(z)], \; F(z) = \frac{Y_{zs}(z)}{H(z)}f(k)=Z−1[F(z)],F(z)=H(z)Yzs(z) ;
- 表示系统特性:频率特性、稳定性等。
-
分解:
f(k)=12πj∮cF(z)zzkdz, −∞<k<∞f({\color{red}k}) = \frac{1}{2\pi j} \oint_c \frac{F(z)}{z} z^{ {\color{red}k}} dz, \; -\infty < k < \inftyf(k)=2πj1∮czF(z)zkdz,−∞<k<∞
- 基本信号 zkz^kzk :
z0k→h(k)→z0k⋅H(z0)z_0^k \to \boxed{h(k)} \to z_0^k \cdot H(z_0)z0k→h(k)→z0k⋅H(z0)
f(k)→h(k)→yf(k)f(k) \to \boxed{h(k)} \to y_f(k)f(k)→h(k)→yf(k)
- 任意信号:
12πjF(z)z⋅zk→12πjF(z)z⋅zkH(z)\frac{1}{2\pi j} \frac{F(z)}{z}\cdot z^k \to \frac{1}{2\pi j} \frac{F(z)}{z} \cdot z^k H(z)2πj1zF(z)⋅zk→2πj1zF(z)⋅zkH(z)
∮c12πjF(z)z⋅zkdz→∮c12πjF(z)z⋅zkH(z)dz\oint_c\frac{1}{2\pi j} \frac{F(z)}{z}\cdot z^k dz \to \oint_c\frac{1}{2\pi j} \frac{F(z)}{z} \cdot z^k H(z) dz∮c2πj1zF(z)⋅zkdz→∮c2πj1zF(z)⋅zkH(z)dz
∮c12πjF(z)z⋅zkdz→∮c12πjF(z)⋅H(z)z⋅zkdz\oint_c\frac{1}{2\pi j} \frac{F(z)}{z}\cdot z^k dz \to \oint_c\frac{1}{2\pi j} \frac{ {\color{blue}F(z)\cdot H(z)} }{z} \cdot z^k dz∮c2πj1zF(z)⋅zkdz→∮c2πj1zF(z)⋅H(z)⋅zkdz
Yf(z)=F(z)⋅H(z)Y_f(z) = F(z) \cdot H(z)Yf(z)=F(z)⋅H(z)
- 回顾 转换成时域
f(k)⋆h(k)↔F(z)⋅H(z)f(k)\star h(k) \leftrightarrow F(z) \cdot H(z)f(k)⋆h(k)↔F(z)⋅H(z)
8.2.2. 系统特性
离散系统的零点与极点
- 类比
H(z)=B(z)A(z)=bmzm+bm−1zm−1+⋯+b1z+b0zn+an−1zn−1+⋯+a1z+a0=bm(z−ζ1)(z−ζ2)⋯(z−ζm)(z−P1)(z−P2)⋯(z−Pn)=bm∏j=1m(z−ζj)∏i=1n(z−Pi), m≤n\begin{aligned}H(z) & = \displaystyle \frac{B(z)}{A(z)}\\ & = \displaystyle \frac{b_m z^m + b_{m-1}z^{m-1} + \cdots + b_1 z + b_0}{z^n + a_{n-1}z^{n-1} + \cdots +a_1z+a_0}\\ & = \frac{b_m(z-\zeta_1)(z-\zeta_2)\cdots(z-\zeta_m)}{(z-P_1)(z-P_2)\cdots(z-P_n)} \\ &= \frac{b_m \prod^{m}_{j=1}(z-\zeta_j)}{\prod^{n}_{i=1}(z-P_i)}, \; m\leq n \end{aligned}H(z)=A(z)B(z)=zn+an−1zn−1+⋯+a1z+a0bmzm+bm−1zm−1+⋯+b1z+b0=(z−P1)(z−P2)⋯(z−Pn)bm(z−ζ1)(z−ζ2)⋯(z−ζm)=∏i=1n(z−Pi)bm∏j=1m(z−ζj),m≤n
- H(z)H(z)H(z) 的零点:
ζi, i=1,2,⋯ ,m\zeta_i, \; i =1,2,\cdots, mζi,i=1,2,⋯,m
- H(z)H(z)H(z) 的极点:
Pi, i=1,2,⋯ ,mP_i, \; i =1,2,\cdots, mPi,i=1,2,⋯,m
- 零/极点的种类: 实数、
- 复数 (复数零、极点必共轭 )
- 一阶、二阶及二阶以上极点
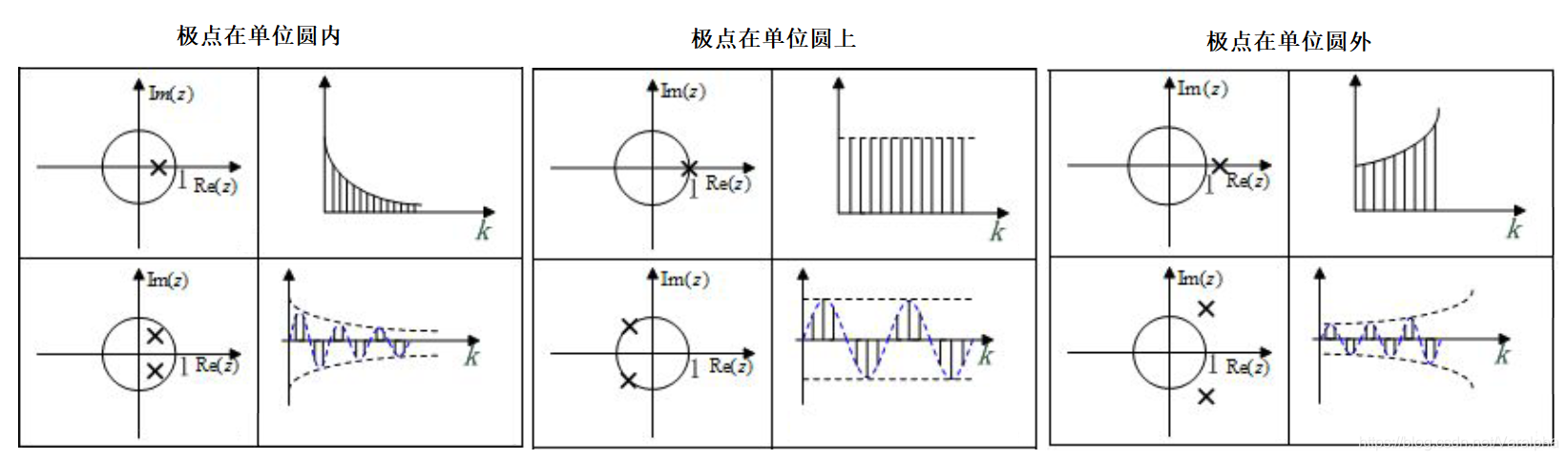
零、极点与h(k)的关系
-
极点在单位圆内
在实轴上:
-
一阶极点:
Azz−a↔Aak↓ε(k), ∣a∣<1\frac{Az}{z-a}\leftrightarrow A {\color{blue}a^k\downarrow} \varepsilon(k),\; \lvert a \rvert <1z−aAz↔Aak↓ε(k),∣a∣<1 - 二阶极点:
Az(z−a)2↔Akak−1↓ε(k), ∣a∣<1\frac{Az}{(z-a)^2}\leftrightarrow A{\color{blue}ka^{k-1}\downarrow} \varepsilon(k),\; \lvert a \rvert <1(z−a)2Az↔Akak−1↓ε(k),∣a∣<1 -
不在实轴上:
-
一阶极点:
Azz−rejβ+A∗zz−re−jβ↔2∣A∣rk↓cos(βk+θ)ε(k), r<1\frac{Az}{z-r e^{j\beta}} + \frac{A^*z}{z-re^{-j\beta}}\leftrightarrow 2\lvert A \rvert {\color{blue}r^k\downarrow} \cos(\beta k + \theta) \varepsilon(k),\; r<1z−rejβAz+z−re−jβA∗z↔2∣A∣rk↓cos(βk+θ)ε(k),r<1 - 二阶极点:
Az(z−rejβ)2+A∗z(z−re−jβ)2↔2∣A∣rk−1↓cos(β(k−1)+θ)ε(k), r<1\frac{Az}{(z-r e^{j\beta})^2} + \frac{A^*z}{(z-re^{-j\beta})^2}\leftrightarrow 2\lvert A \rvert {\color{blue}r^{k-1}\downarrow} \cos(\beta (k-1) + \theta) \varepsilon(k),\; r<1(z−rejβ)2Az+(z−re−jβ)2A∗z↔2∣A∣rk−1↓cos(β(k−1)+θ)ε(k),r<1 -
结论: 对应h(k)h(k)h(k)按指数规律衰减;
极点在单位圆上
在实轴上:
-
一阶极点:
Azz±1↔A(±1k)ε(k)\frac{Az}{z\pm 1}\leftrightarrow A {\color{blue}(\pm 1^k)} \varepsilon(k)z±1Az↔A(±1k)ε(k)
Az(z±1)2↔Ak↑(±1k−1)ε(k)\frac{Az}{(z\pm 1)^2}\leftrightarrow A {\color{red}k\uparrow}{\color{blue}(\pm 1^{k-1})} \varepsilon(k)(z±1)2Az↔Ak↑(±1k−1)ε(k)
不在实轴上:
-
一阶极点:
Azz−rejβ+A∗zz−re−jβ↔2∣A∣cos(βk+θ)ε(k), r<1\frac{Az}{z-r e^{j\beta}} + \frac{A^*z}{z-re^{-j\beta}}\leftrightarrow 2\lvert A \rvert \cos(\beta k + \theta) \varepsilon(k),\; r<1z−rejβAz+z−re−jβA∗z↔2∣A∣cos(βk+θ)ε(k),r<1
Az(z−rejβ)2+A∗z(z−re−jβ)2↔2∣A∣k↑cos(β(k−1)+θ)ε(k), r<1\frac{Az}{(z-r e^{j\beta})^2} + \frac{A^*z}{(z-re^{-j\beta})^2}\leftrightarrow 2\lvert A \rvert {\color{red}k\uparrow} \cos(\beta (k-1) + \theta) \varepsilon(k),\; r<1(z−rejβ)2Az+(z−re−jβ)2A∗z↔2∣A∣k↑cos(β(k−1)+θ)ε(k),r<1
结论: 一阶极点对应h(k)h(k)h(k)为稳态分量;二阶及二阶以上极点对应h(k)h(k)h(k)增长。
极点在单位圆外
在实轴上:
-
一阶极点:
Azz−a↔Aak↑ε(k), ∣a∣>1\frac{Az}{z-a}\leftrightarrow A {\color{blue}a^k\uparrow} \varepsilon(k),\; \lvert a \rvert >1z−aAz↔Aak↑ε(k),∣a∣>1
Az(z−a)2↔Akak↑ε(k), ∣a∣>1\frac{Az}{(z-a)^2}\leftrightarrow A{\color{blue}ka^k\uparrow} \varepsilon(k),\; \lvert a \rvert >1(z−a)2Az↔Akak↑ε(k),∣a∣>1
不在实轴上:
-
一阶极点:
Azz−rejβ+A∗zz−re−jβ↔2∣A∣rk↑cos(βk+θ)ε(k), r>1\frac{Az}{z-r e^{j\beta}} + \frac{A^*z}{z-re^{-j\beta}}\leftrightarrow 2\lvert A \rvert {\color{blue}r^k\uparrow} \cos(\beta k + \theta) \varepsilon(k),\; r>1z−rejβAz+z−re−jβA∗z↔2∣A∣rk↑cos(βk+θ)ε(k),r>1
Az(z−rejβ)2+A∗z(z−re−jβ)2↔2∣A∣rk−1↑cos(β(k−1)+θ)ε(k), r>1\frac{Az}{(z-r e^{j\beta})^2} + \frac{A^*z}{(z-re^{-j\beta})^2}\leftrightarrow 2\lvert A \rvert {\color{blue}r^{k-1}\uparrow} \cos(\beta (k-1) + \theta) \varepsilon(k),\; r>1(z−rejβ)2Az+(z−re−jβ)2A∗z↔2∣A∣rk−1↑cos(β(k−1)+θ)ε(k),r>1
结论: 对应h(k)h(k)h(k)按指数规律增长。
8.2.3. 离散系统稳定性判据(因果系统)
- 离散系统稳定的时域充要条件:(绝对可和)
∑k=−∞∞∣h(k)∣<∞\sum^{\infty}_{k=-\infty} \lvert h(k)\rvert < \inftyk=−∞∑∞∣h(k)∣<∞
-
离散系统稳定性的Z域充要条件:
若LTI离散系统的系统函数 H(z)H(z)H(z) 的收敛域包含单位圆,则系统为稳定系统。 - 若LTI离散因果系统稳定,要求其系统函数 H(z)H(z)H(z) 的极点全部在单位圆内。
- ∣pj∣<1\lvert p_j \rvert <1∣pj∣<1
离散因果系统稳定性判定--朱里准则(Jury stability criterion)
H(z)=B(z)A(z)=bmzm+bm−1zm−1+⋯+b1z+b0anzn+an−1zn−1+⋯+a1z+a0\begin{aligned}H(z) = \displaystyle \frac{B(z)}{A(z)} = \displaystyle \frac{b_m z^m + b_{m-1}z^{m-1} + \cdots + b_1 z + b_0}{a_nz^n + a_{n-1}z^{n-1} + \cdots +a_1z+a_0}\end{aligned}H(z)=A(z)B(z)=anzn+an−1zn−1+⋯+a1z+a0bmzm+bm−1zm−1+⋯+b1z+b0
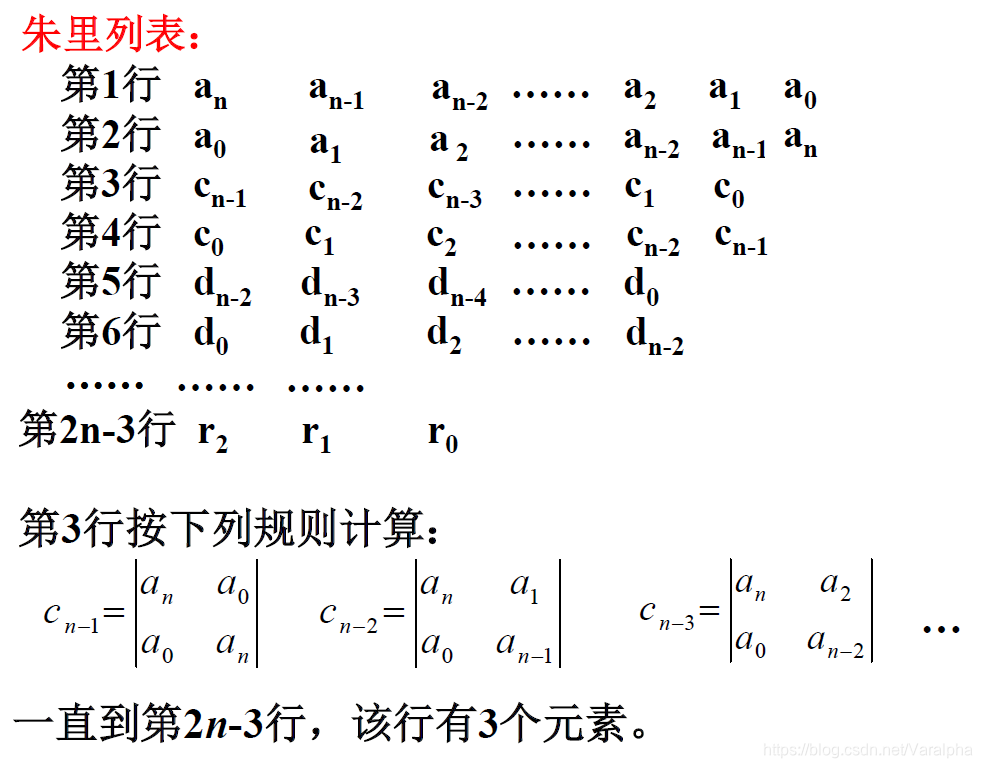
要判断 A(z)=0A(z)=0A(z)=0 的所有根的绝对值是否都小于 111 。
朱里准则指出: A(z)=0A(z)=0A(z)=0 的所有根都在单位圆内的充要条件是:
-
A(1)>0A(1)>0A(1)>0
对奇数行,其第1个元素必大于最后一个元素的绝对值。
A(z)=a2z2+a1z+a0A(z) = a_2z^2 + a_1z + a_0A(z)=a2z2+a1z+a0
易得 A(1)>0, A(−1), a2>∣a0∣A(1)>0, \; A(-1),\; a_2>\vert a_0\vertA(1)>0,A(−1),a2>∣a0∣
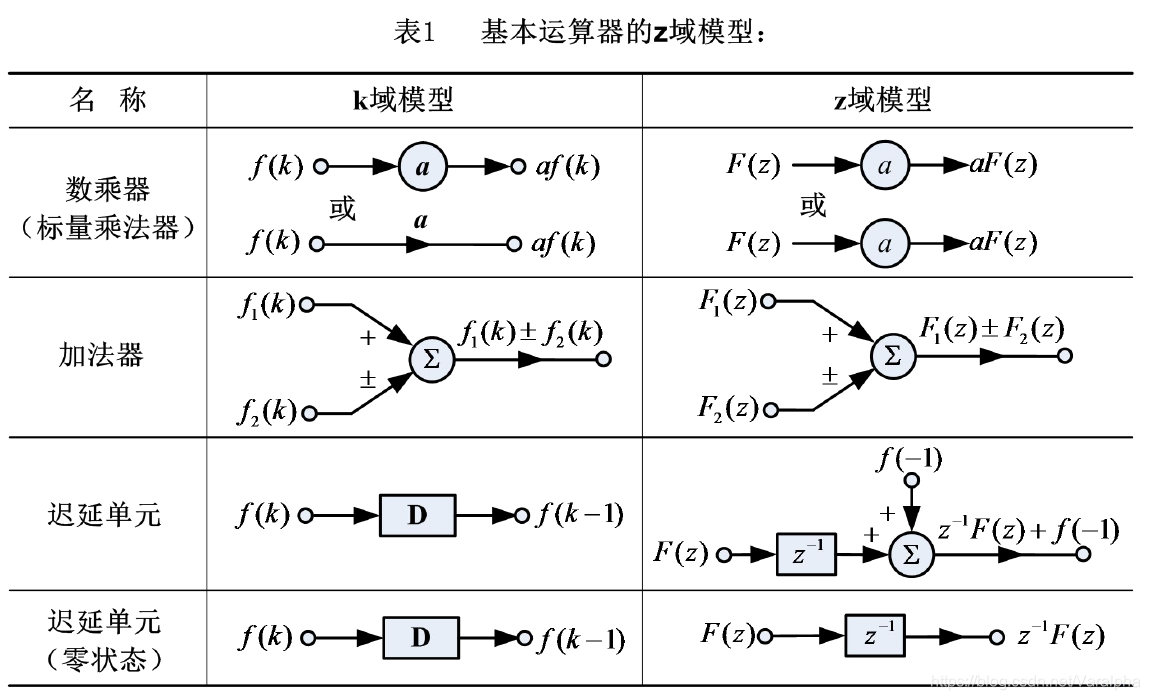
8.2.4. 系统的方框图
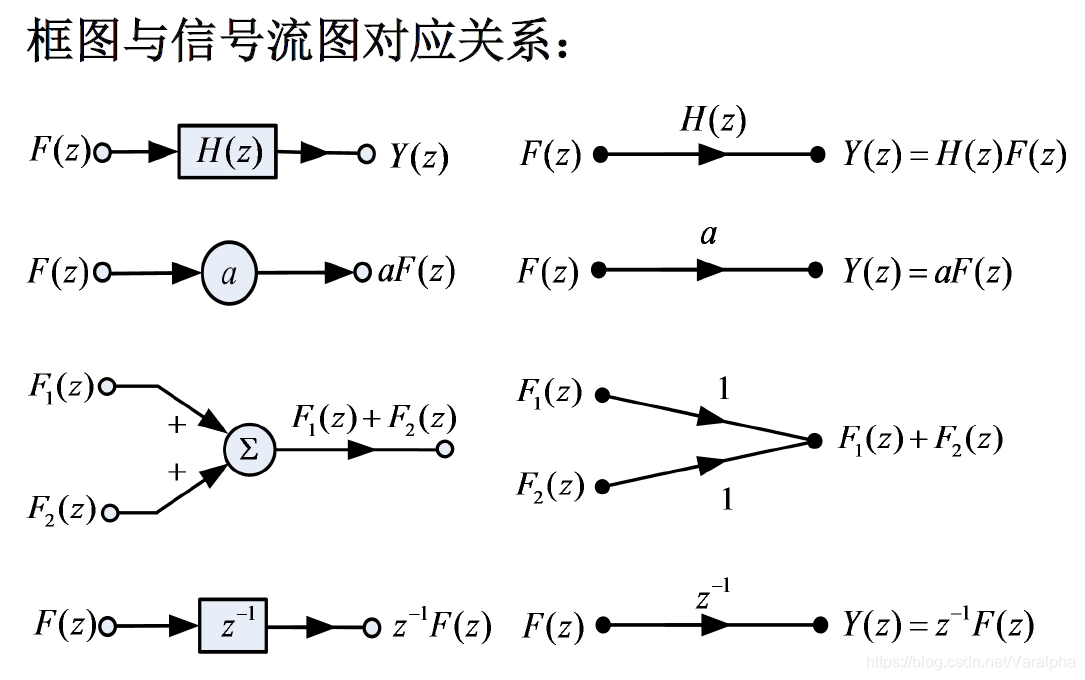
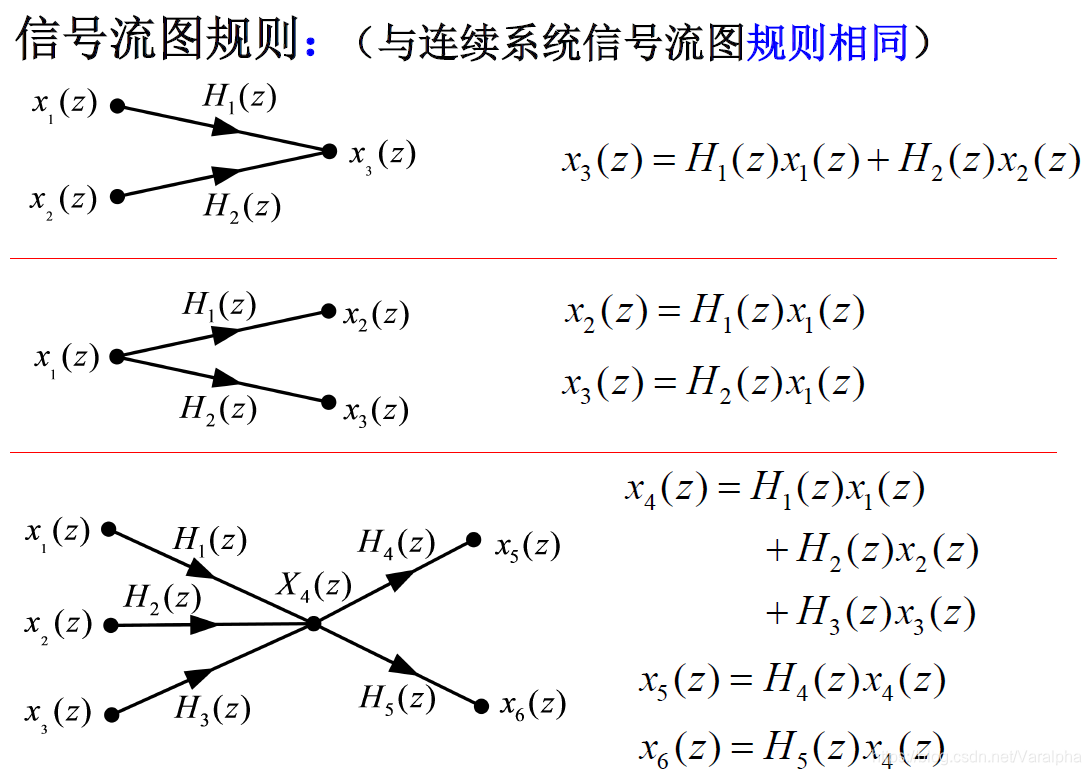
8.2.5. 系统的流图
- 点赞
- 收藏
- 分享
- 文章举报
 Varalpha
发布了25 篇原创文章 · 获赞 9 · 访问量 3477
私信
关注
Varalpha
发布了25 篇原创文章 · 获赞 9 · 访问量 3477
私信
关注

- [离散时间信号处理学习笔记] 3. 一些基本的LTI系统
- 数字信号处理学习笔记一:离散时间信号与离散时间系统
- 数字信号处理(MATLAB版)学习笔记1--离散时间信号与系统
- 信号与系统学习笔记——连续系统的时域分析
- 数字信号处理(MATLAB版)学习笔记2--离散时间信号与系统
- [离散时间信号处理学习笔记] 10. z变换与LTI系统
- 数字信号处理学习笔记一:离散时间信号与离散时间系统
- 信号与系统学习笔记1——离散时间复指数序列的周期性质
- [离散时间信号处理学习笔记] 5. 离散时间信号与系统的频域表示
- [离散时间信号处理学习笔记] 1. 离散时间信号与离散时间系统
- 数字信号处理学习笔记二:Z变换及离散时间系统分析
- android 学习笔记(六)一些技巧6.1 Android系统root破解原理分析*
- python 系统学习笔记(三)---function
- python 系统学习笔记(十二)---os os.path os.walk
- 【学习笔记】python版希尔排序及其时间复杂度分析
- python 系统学习笔记(五)---字典
- 网上图书商城项目学习笔记-003系统功能模块分析
- python数据分析与挖掘学习笔记(4)-垃圾邮件自动识别
- python 系统学习笔记(十)---类
- python网络编程学习笔记(四):域名系统