无人驾驶技术——雷达截面和距离方程
文章目录
上一篇了解了针对汽车应用的首选雷达类型FMCW雷达,这一节主要是针对雷达截面(Radar Cross Section)和计算距离的方程进行学习,整理了笔记,方便以后查询和其他入门的同学了解。
Radar Cross Section
雷达截面
目标反射雷达能量的大小和能力由一个术语定义,即雷达横截面,其单位为平方米。
该单元显示雷达的横截面是一个区域。目标雷达截面积取决于:
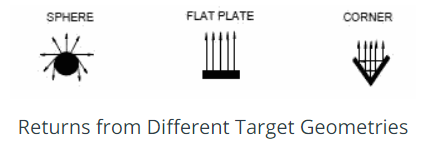
1.目标的物理几何结构和外部特征: 光滑的边缘或表面会将波向各个方向散射,从而降低RCS。然而,尖角会将返回信号聚焦回源的方向,从而导致更高的RCS。(下图针对不同的目标几何图形) 2.照明雷达的方向, 3.雷达发射机的频率, 4.用于汽车、卡车、自行车的材料,甚至在某些情况下,行人的服装材料。
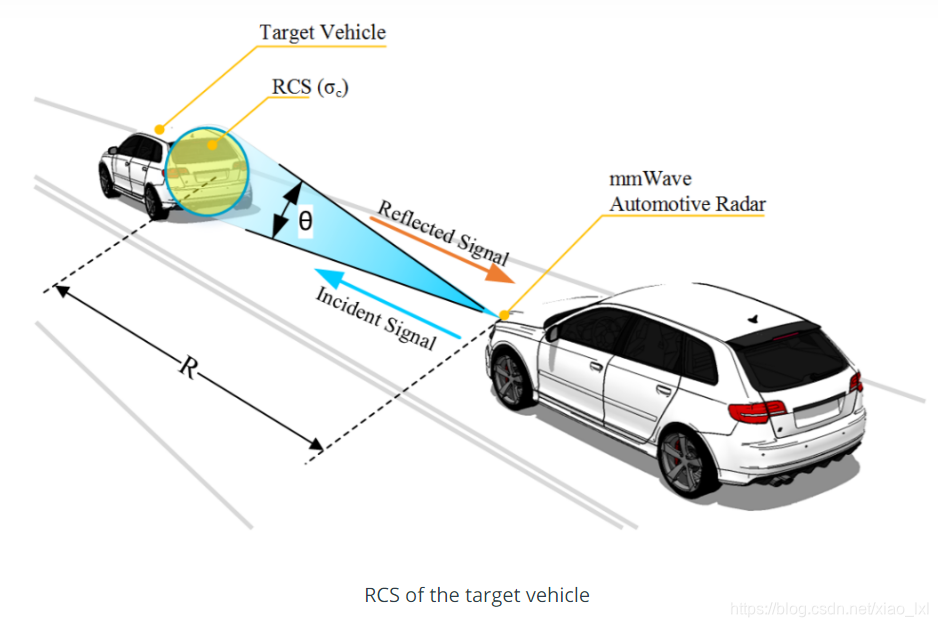
如果目标上的所有接收到的雷达能量在所有方向上都被均匀反射,那么雷达横截面将等于发射器所看到的目标横截面面积。在实践中,一些能量被吸收,反射能量在各个方向上分布不均匀。因此,雷达的横截面很难估计,通常是通过测量来确定的。
不同几何目标物体返回的结果不同,如下图所示:
RCS 单元
RCS 单元(Radar Cross Section units)
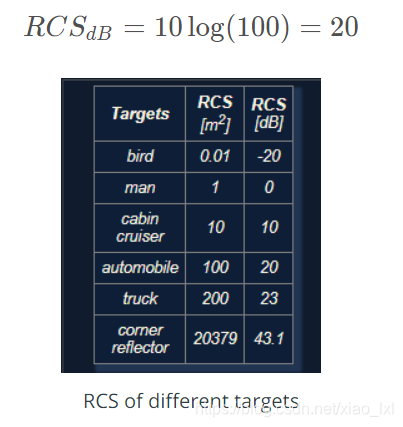
RCS也可以用对数值(db)来定义,因为它增加了返回信号的强度。从RCS到DB的转换公式如下:

下表显示了每平方米和db中不同目标的RCS值。您可以使用上面的公式查看表中的两列是如何相关的。例如,从下表中我们可以看到汽车:
隐形飞机

上图中的隐形飞机,就是由于它光滑的表面,尖形的几何结构和表面涂了不反射漆,才能让雷达信号检测不到,达到了隐形的目的
距离方程
利用雷达测距方程,我们可以设计雷达发射机、接收机和天线,使其具有所需的功率、增益和噪声性能,以满足测距要求。
与仅覆盖50米的短程雷达相比,设计用于覆盖300米范围和探测横截面较小目标的远程雷达需要更高的发射功率和更多的天线增益。与横截面较小的目标相比,横截面较大的目标可以在较长的范围内被检测到。
距离方程公式
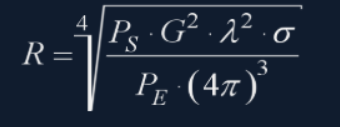
其中
R 表示雷达能探测目标的最大距离。 Ps 表示雷达发射功率(dBm) G表示-发射/接收天线的增益(dbi) λ 表示信号波长(mm) σ 表示雷达横截面(平方米) Pe 表示最小接收功率雷达可以检测。
信号强度水平
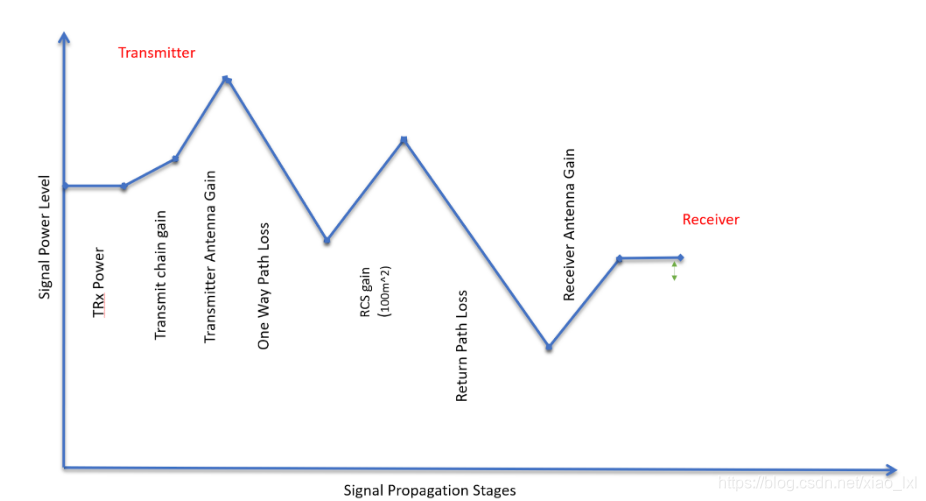
上图显示了信号强度水平的变化:
-发射机功率
-功率放大器进一步提高信号强度-传输链增益
-使用天线进一步放大信号
-单向路径损耗表示信号强度在向目标移动时的损耗。
-从目标反射后,信号根据目标的RCS进行放大。
-当雷达散射截面(rcs)增大后,信号返回雷达,强度损失与前进方向相似。
-接收天线在将返回信号发送到处理单元之前将其放大。
雷达探测
下图显示了雷达测距的输出。峰值对应目标返回信号的强度,频率与距离有关。频率和范围之间的关系将在下一课中讨论。
雷达不能探测到低于噪声级的信号。噪声水平由接收器产生的热噪声决定。要成功检测目标,返回信号强度需要大于噪声级。这是由一个称为信噪比或信噪比的属性定义的。
信噪比是信号强度相对于噪声水平的定量测量。如果信噪比太低,雷达就很难区分信号和噪声。因此,高信噪比是成功探测目标的理想选择。通常,7-13分贝的信噪比可确保在道路情况下成功检测。
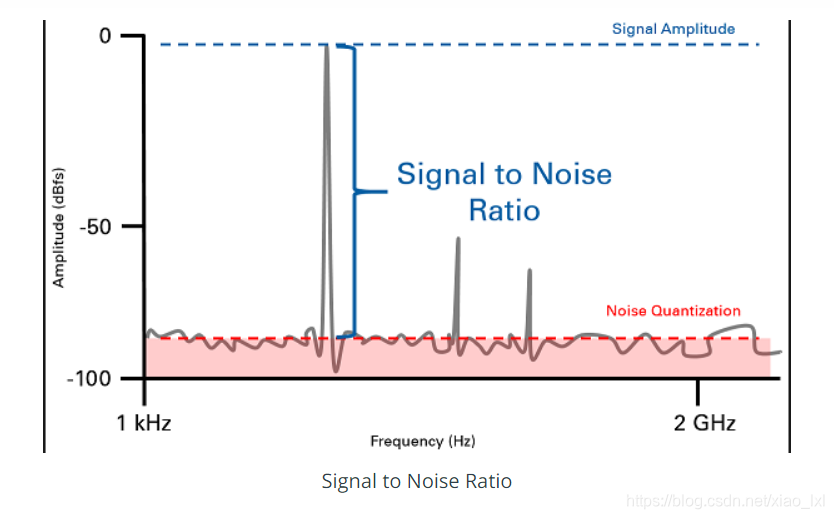
上图显示了SNR的对数值=功率级(单位:dbm)-噪声级(dbm)。该图显示了快速傅里叶变换(FFT)的距离输出。一般来说,信噪比越高,雷达探测成功的机会就越大。
matlab练习:最大距离计算
下面的matlab代码提供了一些可用于上述距离方程的参数。您的任务是用以下代码完成TODOS:
1.使用光速c计算波长λ。 2.使用第1部分的结果。以及计算雷达距离的距离方程。 3.使用disp(range).将距离打印到屏幕。
MATLAB代码实现如下:
%Operating frequency (Hz) fc = 77.0e9; %Transmitted power (W) Pt = 3e-3; %Antenna Gain (linear) G = 10000; %Minimum Detectable Power Ps = 1e-10; %RCS of a car RCS = 100; %Speed of light c = 3*10^8; %TODO: Calculate the wavelength lambda = c / fc * 1000; disp(lambda); %TODO : Measure the Maximum Range a Radar can see. distance = sqrt(sqrt(Ps* G*G*lambda*lambda*RCS /(Pt*(4*pi)*(4*pi)*(4*pi)))); disp(distance);
结果是波长为3.8961 mm和 最大距离是1.2637

- 【每日新闻】三星电子市值跌至全球第18位,落后中国阿里腾讯 | 中国AI领袖人物吴甘沙:无人驾驶技术距离我们已经不再遥远
- 无人驾驶技术之激光雷达市场分析
- 【无人驾驶系列】光学雷达(LiDAR)在无人驾驶技术中的应用
- 雷达干涉形变测量-步进频率体制一维距离像
- 从ThoughtWorks 2017技术雷达看微软技术
- Thoughtworks的技术雷达
- 雷达技术在汽车安全方面的应用
- 无人驾驶技术——ROS进阶之python实现串口通信
- 无人驾驶技术的灵魂——SLAM的现在与未来
- 无人驾驶技术排名:百度居中游,苹果特斯拉垫底 | 行业
- 【商业模式】百度力推无人驾驶技术背后:陆奇详解人工智能的商业化逻辑
- 官哥雷达模组样品,特列出技术指标,欢迎高手捧场
- 适定、超定和欠定方程及压缩传感技术
- 机器人技术(9)AtdRobot读取激光雷达数据教程
- 计算机视觉技术在无人驾驶中的应用
- 对空雷达技术发展动态【国外】
- 长短距离通信相关技术与模块
- 无人驾驶技术纯熟,该实现无人客机驾驶技术?
- 中国激光雷达技术崛起 服务机器人用激光雷与进口相差无几
- 激光雷达(LDS)技术原理解释及实现过程