ROS基础教程学习笔记1-安装并配置ROS环境
2019-06-26 16:16
274 查看
首先是安装ROS,我所用的ubuntu16.04,所安装的ROS是kinetic版本,安装请参考:
1.管理环境变量
在前面的安装过程中,配置亮环境,此时来查看ROS环境是否配置成功:
[code]export | grep ROS
植入命令之后会出现如下信息:
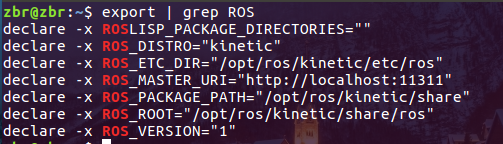
如果没有就需要重新输入添加环境变量的命令。
2.创建ROS工作空间
通过创建ros工作站,也可以检验ros是否安装成功。
[code]mkdir -p ~/catkin_ws/src cd catkin_ws/src
就算这个工作空间是空的,也可以直接编译
[code]cd ~catkin_ws/ catkin_make
接下来首先source一下新生成的setup.*sh文件:
[code]source devel/setup.bash
要想保证工作空间已配置正确需确保ROS_PACKAGE_PATH环境变量包含你的工作空间目录
[code]echo $ROS_PACKAGE_PATH /home/<youruser>/catkin_ws/src:/opt/ros/kinetic/share:/opt/ros/indigo/stacks
准备工作做好亮就可以进行后续的学习。
参考文献:http://wiki.ros.org/cn/ROS/Tutorials/InstallingandConfiguringROSEnvironment

相关文章推荐
- ROS学习笔记------ROS机器人系统设计-----基础编程 day 8 2019/3/7 帅某(Kinect的安装,xarco模型,xarco---urdf模型,gazebo物理仿真环境的搭建)
- ROS学习笔记一:安装配置ROS环境
- Yii学习笔记之中的一个(安装与基础环境的配置)
- Yii学习笔记之一(安装与基础环境的配置)
- ROS学习(基于Ubuntu 15.04 和ROS Jade)第三章 ROS核心教程 之 1 安装和配置你的ROS环境
- ROS学习笔记(二):安装,环境配置及指令简介
- Tomcat学习笔记 - 错误日志 - Tomcat安装版安装后第二次启动后闪退(转)-- javac不是内部或外部命令 -- 配置java环境教程
- Yii学习笔记之一(安装与基础环境的配置)
- 《objective-c基础教程》学习笔记 (一)—— 开发环境配置和简单类型输出
- 【安卓学习笔记】JAVA基础Lesson2-JDK安装与环境配置
- Yii学习笔记之一(安装与基础环境的配置)
- daliu_IT学习Android笔记第六篇--JDK安装与环境变量配置
- OPENCV学习笔记(一):安装OpenCV:OpenCV 3.0、OpenCV 2.4.8、OpenCV 2.4.9 +VS 开发环境配置
- java基础学习日记(4)——版本,优势,运行机制,JVM、jre、jdk的区别,环境变量配置以及安装测试
- hadoop学习笔记之-生产环境Hadoop大集群配置安装
- (转载)Laravel学习笔记(一)安装配置开发环境
- Python学习 第一天任务 (三:Python不止基础学习 继续安装爬虫环境的配置)
- MySQL学习笔记之一:安装与配置(Windows 7环境)
- Python学习笔记—基础环境配置
- Hadoop学习笔记(二)----环境搭建之CentOS 7 配置与安装Hadoop