ROS入门3.3
2019-05-12 00:19
162 查看
3.3rospy




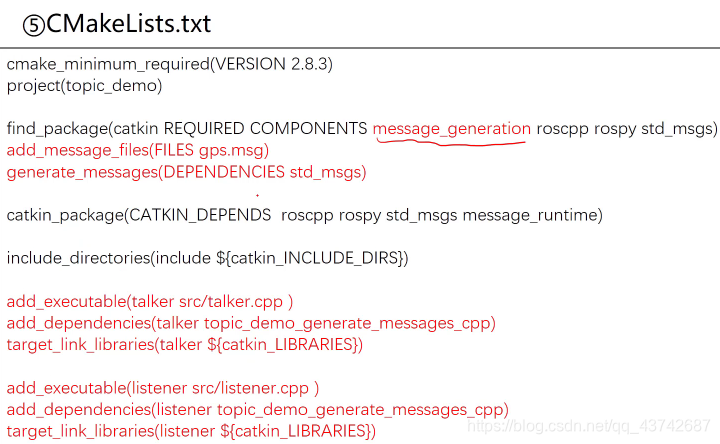
 实例:topic_demo
实例:topic_demo




相关文章推荐
- ROS入门3.3(实例)
- 机器人操作系统ROS Indigo 入门学习(6)——理解ROS Nodes
- 机器人操作系统ROS Indigo 入门学习(1)——安装ROS Indigo
- 机器人操作系统ROS Indigo 入门学习(9)——理解ROS rqt_console和 roslaunch
- 机器人操作系统ROS Indigo 入门学习(17)——roswtf入门指南
- 机器人操作系统ROS Indigo 入门学习(14)——用C++语言写一个简单的service和client
- 我的ROS入门(五):总算搞通ROS的服务节点订阅发布消息话题了
- 第一章--ROS机器人操作系统入门简介
- Mikrotik ROS脚本语法入门
- 机器人操作系统ROS Indigo 入门学习(5)——编译一个ROS Package
- 机器人操作系统ROS Indigo 入门学习(0)——ROS的UNIX基础
- [wcf]入门.3.3
- [置顶] 无人驾驶汽车系统入门(十四)——ROS入门与实践(1)
- 机器人操作系统ROS Indigo 入门学习(7)——理解ROS Topic
- ROS入门_1.4 配置ROS环境
- ROS入门_1.17 roswtf入门
- SLAM+语音机器人DIY系列:(二)ROS入门——4.如何编写ROS的第一个程序hello_world
- 机器人操作系统ROS Indigo 入门学习(2)——安装和配置你的ROS环境
- 机器人操作系统ROS Indigo 入门学习(10)——使用rosed编辑ROS文件
- 机器人操作系统ROS Indigo 入门学习(18)——ROS wiki导航