利用STM32F407控制US-100超声波模块测距实验
2019-03-23 16:07
106 查看
超声波测距是进行小车实验时最为常用的测距模块,因为其原理简单以及价格低廉,受到很多同学的喜爱,下面为大家介绍利用STM32F407单片机控制US-100进行测距。
原理:给超声波模块Trig端一个大于10us的高电平,模块会自动发射8个40KHZ的声波,同时Echo电平变高,当声波被模块接收时,Echo电平变低,通过时间差可以计算出测量的距离。
首先,硬件部分,超声波模块用的是US-100,可以在淘宝上购买,价格也非常的便宜,单片机用的STM32F407ZGT6如下图:
 US-100图
US-100图
 STM32ZGT6
STM32ZGT6
 US-100的一些参数
US-100的一些参数
 两种配置方式,这里我们选择比较简单的TTL电平触发模式
两种配置方式,这里我们选择比较简单的TTL电平触发模式
 接线就更为简单了,4,5号接地接一个就行
接线就更为简单了,4,5号接地接一个就行
第二步,上程序,需要配置的有三个文件,串口通信,传感器引脚配置以及定时器TIM2的配置
首先,看一下主函数
 主要是几个初始化,串口,LED灯,传感器,在主循环中,可以设置LED0的闪烁,来表示正在测量中,然后调用Senor_Using()函数来测量距离
主要是几个初始化,串口,LED灯,传感器,在主循环中,可以设置LED0的闪烁,来表示正在测量中,然后调用Senor_Using()函数来测量距离

这个主要的函数,设置定时器TIM来计时,确定发射与接收的两个引脚pb8,9,并配置其模式,最后使能TIM2,这些都是基本的配置方法,就不多家累赘
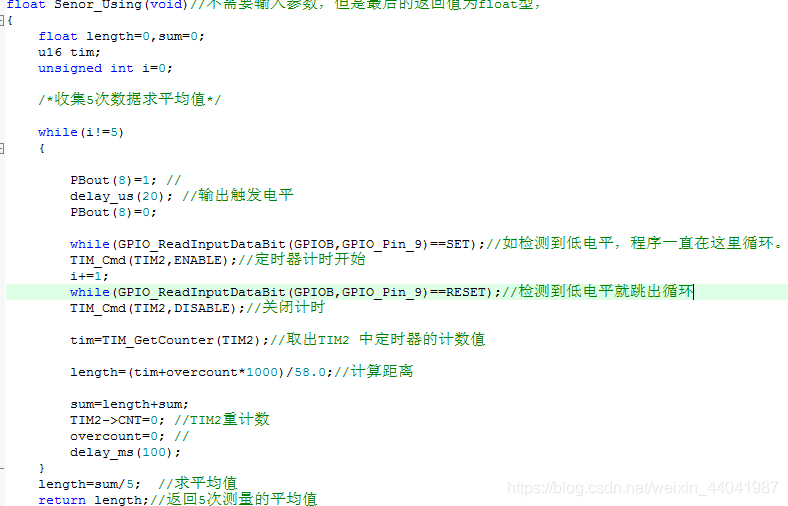
这个是测量函数,基本原理是给Trig一个20us的高电平,触发声波,并且Echo变为高电平,此时开启定时器,等到超声波被模块接收,Echo变成低电平,从而得出声波发送的时间,计算出距离,测量5次取平均值,基本原理在注释中写的很清楚了,再配置中断服务函数即可
以上就是超声波测距的基本过程了,可试用基本F4的板子,少进去程序,连好线,打开串口助手,就可以测量距离了。

相关文章推荐
- 基于Dragon Board410c与科大讯飞麦克风阵列模块的语音唤醒控制以及US-100超声波的实际应用
- NB-IOT之US100超声波模块测距与测温---环境监测物联系统,stm32f103串口通信
- [笔记]Arduino平台使用US-100超声波测距模块的电平模式测距实验
- stm32F1使用us-100超声波测距
- [笔记]Arduino平台使用US-100超声波测距模块的串口模式测距实验
- US-100超声波(测距与测温)基于stm32f103源码------方式串口通信(测距与测温)
- 利用US-100超声波传感器测距的核心代码
- 单片机控制雷达测距模块HC-SR04测量距离(通过测试)
- iic协议扩展板和pmw引脚控制舵机转向与超声测距的实验,可实现简易超声雷达
- 日本研究者利用超声波控制物体悬浮
- US-100超声波 使用
- ardunio 实验:超声波测距、声光报警模拟倒车雷达
- 实验9 红外模块控制实验
- 利用kinnect识别语音,通过NRF24L01控制小车运动——实验课设
- 利用pica8完成Mysql集群服务QoS控制实验
- 利用selenium模块控制浏览器
- 1.28日学习内容——输入捕获实验,超声波测距
- Arduino 各种模块篇-继电器-利用串口命令-控制继电器
- 超声波模块 测距模块 超声波 传感器 送资料
- 基于US-100超声波在dragonboard 410c Linux上的超声波驱动编写