UR3机械臂+Realsense D435+ROS手眼标定记录
UR3机械臂+Realsense D435+ROS手眼标定记录
前面一段时间,由于实验室工作安排,上手了UR3机械臂和Realsense D435深度相机,在手眼标定这一段真的是让人心累,断断续续折腾了两周左右,最终才真正的搞定,虽然精度不咋地。
设备
UR3机械臂一台、Realsense D435相机一台,aruco_ros标定包(相应的标定标志可以在包里找到,自行打印)
电脑环境:
(1)16.04的ubuntu系统,linux内核为4.17,64位操作系统:
4.17.0-041700-generic #201806041953 SMP Mon Jun 4 19:55:25 UTC 2018 x86_64 x86_64 x86_64 GNU/Linux
查询linux内核命令为 uname -a
Realsense驱动和SDK是和内核版本是有关系的(可能不是很准确),所以 这个地方需要注意,在后续选择Realsense驱动和SDK使用。
对应的ROS版本为Kinetic,ROS版本为1.12.14(也就是目前的ROS1.0,还没有更新到ROS2.0)
前期准备
(1)UR3机械臂的驱动
UR3机械臂的驱动和仿真+显示环境主要还是依赖于他们自己发布的包,参照http://wiki.ros.org/universal_robot即可,下载对应版本即可,文件包括两个package,一个是universal_robot-kinetic-devel,主要包括的是UR的相关模型和相应脚本,包括UR3、UR5、UR10,都在这里面。另外一个package是universal_robot-kinetic-devel,它就是纯粹的硬件平台的驱动了,没啥子好说的,也没有细致的去看那么多东西。
我在运行UR3机械臂的过程中主要步骤是先仿真再实物,仿真平台是gazebo(个人之前对gazebo比较熟悉),而正好UR提供了gazebo的仿真模型以及启动脚本,按照readme运行即可。
仿真环境成功启动的标志是rviz上面的机器人模型和gazebo中的机器人模型状态是一样的就OK(如果不一样的话,rviz那个是竖着的,gazebo那个是横着的,没留图所以就不上图了)
至于路径规划,UR3里面的还是依赖与moveit,我个人感觉是通过rviz界面进的moveit,暂时还没有去细致的抠这个东西,要做规划,首先是按照教程来一个setup,搭建路径规划的碰撞模型(对于采样运动规划,碰撞模型还是很关键的),参考网上资料就好(古月居的一个http://www.guyuehome.com/115,不是UR机械臂的,但是可以参考,网上应该有UR对应的,不嫌麻烦也可以直接搜一下)
至于如何设置目标点,提供一个参考书http://mastering-ros.com,找到第4章的seven_dof_arm_test(直接搜这个应该百度也有,感谢度娘,资源真的丰富)可以先用着看看。
(2)Realsense D435的驱动相关
Realsense的驱动安装很麻烦,很麻烦,很麻烦,只能说按照官网来吧,驱动我使用的版本2.16.5(要注意驱动版本和系统内核(linux内核)要适配,这个很关键),SDK是我使用的是realsense-2.1.1(realsense的sdk)总的来说
参考网站:
https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md#installing-the-packages(realsense2环境安装)
https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md (sdk安装环境配置)
https://wiki.ubuntu.com/Kernel/Support (内核适配)
有个东西没有找到怎么弄了,因为一个月前配置的了,没有存下文档。
大致步骤是先安装驱动,驱动安装好的标志是realsense_viewer能够检测到realsense并读取到图片,然后再安装sdk,我在相应配置过程中,经常出现sdk安装之后realsense_viewer检测不到设备了(这并不是正常现场,说明你得重新来一次了),总的来说多试试就好了。
一定要注意系统内核版本、驱动版本、设备型号以及sdk版本,不能乱来。
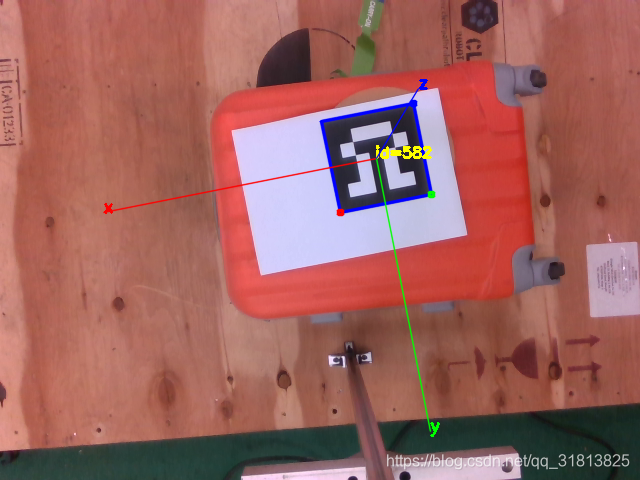
然后利用aruco_ros和easy_handeye进行了手眼标定,因为时间原因就不在这里详细介绍了,也有很大一部分原因在于没有留图,不好解释,后来也暂时使用了kinect完成任务,回头做一个ur+kinect的介绍。
唯一的存图(aruco标志识别结果)
演示demo(优酷网站)
http://v.youku.com/v_show/id_XMzk5NTU1OTgyMA==.html?spm=a2h3j.8428770.3416059.1
第一次写,还有点赶时间完成任务式的,感觉有点儿烂,如果有问题或者兴趣可以私聊加我。

- CAMCER CALIBRATION/USB_CAM相机标定记录
- halcon标定_记录(转自2638jrx)
- 手眼标定过程记录
- 相机自动标定开发记录
- 使用MALTAB标定实践记录
- halcon自标定记录_转自小马_xiao
- 毕业设计过程记录五,单目摄像机标定
- 问题记录:每次移动相机是否需要重新标定(已解决)
- 算法学习记录
- 实验记录-python1
- 插入记录INSERT(二十五)
- 记录Spring +shiro 单元测试遇见的问题
- 关于xlsx转成json的工具(记录后续使用)
- MySql的记录
- Python·Jupyter Notebook各种使用方法记录
- 11月导入数据库记录(oracle)
- 如何永久删除git仓库中敏感文件的提交记录
- 亲手编译uClinux的体验全记录
- 域名解析 A记录 MX记录 CNAME记录 TTL值
- 记录--