ORB_SLAM2安装及运行——VMware+Ubuntu+ROS
最近在学习ORB_SLAM2,过程中遇到了一些问题,但好在都一一解决了,现在从头开始把安装及运行流程走一遍,仅供参考。
一、虚拟机的安装
1、准备工作:安装好VMware(我的版本是VMware12)、Ubuntu的iso文件(我的版本是ubuntu-14.04.5desktop-amd64.iso)
最好找一个剩余空间大的盘来安装虚拟机,我建了两个文件夹方便使用
(1).VM iso(存放iso文件)。

(2).VM workspace(存放不同版本的ubuntu的相关文件,)

2、新建虚拟机
这一步骤参考https://www.geek-share.com/detail/2700393526.html
3.安装VMware-tool
这一步骤参考https://www.geek-share.com/detail/2728292113.html
有个小插曲,我在输入sudo ./vmware-install.pl 后,系统给了一个问句,结尾是[no]?,这时注意不要输入no或者回车,要输入yes才行,然后进行下一步骤,以后的步骤全程回车就行。
二、ROS的安装
1.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3.
sudo apt-get update
4.
sudo apt-get install ros-indigo-desktop-full(我这里是全部都安装)
5.
apt-cache search ros-indigo
6.
sudo rosdep init rosdep update
7.
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc source ~/.bashrc
8.
sudo apt-get install python-rosinstall
ROS安装直接官网看,很详细,不同版本安装不同的ROS系统,比如14.04对应indigo,16.04对应kinect。
ROS官网链接:http://wiki.ros.org/indigo/Installation/Ubuntu
参考链接:https://www.geek-share.com/detail/2730098070.html
直接从初次运行那开始看。
三、ORB_SLAM2安装包括相关依赖
1、opencv(我用的opencv2.4.11)
官网链接:https://docs.opencv.org/3.4.3/d7/d9f/tutorial_linux_install.html
2.eigen3
3.Pangolin
4.ORB_SLAM2
以上几个步骤参考https://www.imooc.com/article/details/id/29136
至此ORBSLAM2相关的东西都弄完了
四、运行
将dataset

下载好后放入ORB_SLAM2里,然后
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER
注意TUMX里的X指的是123,比如下载的是freiburg1,就输入TUM1。注意输入命令时路径在cd ORB_SLAM2后的路径。
五、测试效果
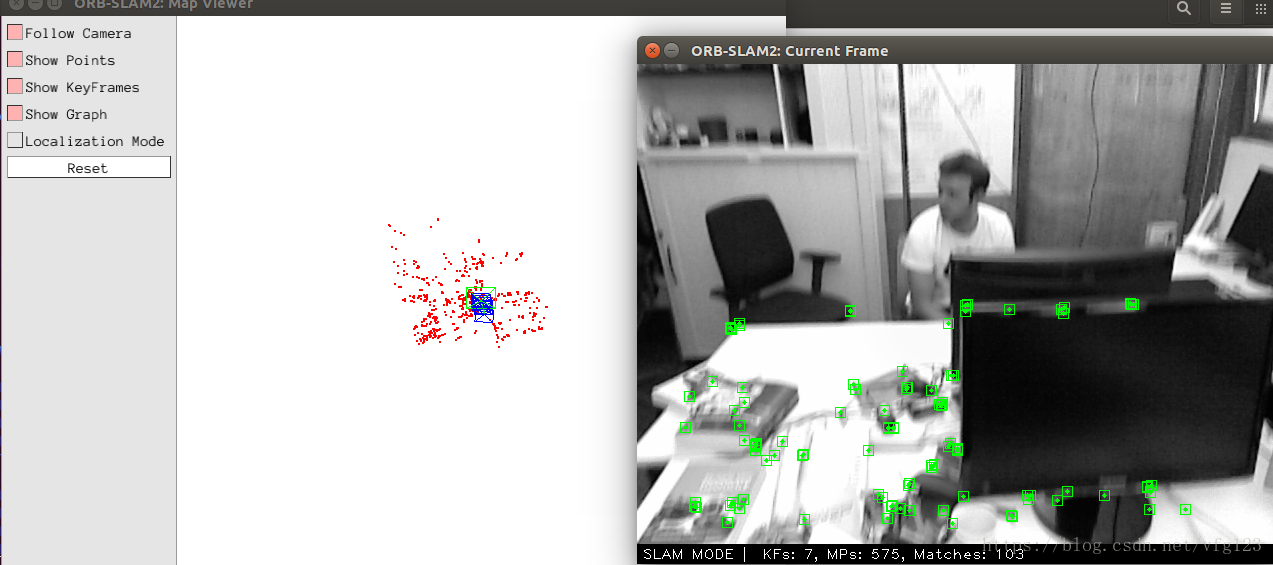
大功告成,大家有问题欢迎留言,本文参考了许多博主的工作,在此感谢
阅读更多

- ORB_SLAM运行详细过程(ubuntu14.04系统和ROS Indigo环境搭建,配置及测试运行)
- 编译安装及运行单目ORBSLAM2在Ubuntu14.04
- 编译安装及运行单目ORBSLAM2在Ubuntu14.04
- ORB-SLAM2安装与运行(非ROS环境下)
- Ubuntu 16 ORB_SLAM2使用KinectV2在ROS上运行总结
- Ubuntu 16.04 ORB_SLAM2+ROS+usb_cam+AR
- [置顶] ubuntu14.04 + ROS下编译Pangolin和ORB_SLAM2死机的解决办法
- 安装ORB_SLAM_ROS时遇到的一个问题
- Ubuntu16.04下 orb_slam初步安装及遇到问题的解决方案
- Ubuntu 16.04+ROS+ORB-SLAM2配置以及相关问题
- Ubuntu14.04安装调试ORB-SLAM——依赖库的安装
- Win7与虚拟机VMware下运行的Ubuntu共享文件夹安装VMware Tools
- ubuntu下安装ROS并运行一个小例程
- REMODE+ORBSLAM运行配置(2) REMODE和编译后的ORB ros工程利用节点实现通讯
- ubuntu16.04下ROS操作系统学习笔记(八)机器人SLAM与 Gmapping-Hector_slam-Cartographer--ORB_SLAM
- ubuntu 16.04 x64 ROS kinetic 安装ORB—SLAM
- REMODE+ORBSLAM运行配置(1) 把ORB编译成ROS工程
- orb-slam的安装/配置/运行
- ORB_SLAM2安装与运行
- ORB_SLAM2系列之一:Ubuntu 14.04 ROS indigo下编译安装ORB_SLAM2