机器人——齐次坐标变换
2018-03-17 08:37
323 查看
机器人齐次坐标变换yangming2466变换定义为在空间中产生运动,目标坐标系的状态发生变化。
坐标变换一般有:
平移
绕轴旋转
平移旋转的复合运动
但是目标坐标的相对于参考坐标系原点的向量OP会发生变换,新的目标坐标系会通过坐标系左乘
变换矩阵得到。
F为目标坐标系4X4齐次矩阵:
F=[nx ox ax px]
[ny oy ay py]
[nz oz az pz]
[ 0 0 0 1 ]
T为4X4变换矩阵:T = [1 0 0 0 dx] [0 1 0 0 dx]
[0 0 1 0 dx]
[0 0 0 0 1 ]
目标坐标系更新(左乘):Fnew = F X T符号描述为:Fnew = Trans (dx,dy,dz) X Fold;
P = [px py p]'
rx为绕X轴旋转3X3旋转矩阵
rx=[1 0 0 ]
[0 Cosθ -Sinθ]
[0 Sinθ Cosθ]
ry为绕Y轴旋转3X3旋转矩阵
ry=[Cosθ 0 Sinθ ]
[0 1 0 ]
[-Sinθ 0 Cosθ]
rz为绕Z轴旋转3X3旋转矩阵
rz=[Cosθ -Sinθ 0 ]
[Sinθ Cosθ 0 ]
[ 0 0 1 ]
绕X轴旋转θ
Pnew = P x rx
符号表示为:
Pnew = Rot(x,θ)
绕Y轴旋转θ
Pnew = P x ry
符号表示为:
Pnew = Rot(x,θ)
绕Z轴旋转θ
Pnew = P x rx
符号表示为:
Pnew = Rot(x,θ)
MATLAB中直观表示:
需要的基础知识:
1线性代数
2matlab绘图操作
绘图代码:
https://download.csdn.net/download/yangming2466/10291956 点击打开链接
坐标变换一般有:
平移
绕轴旋转
平移旋转的复合运动
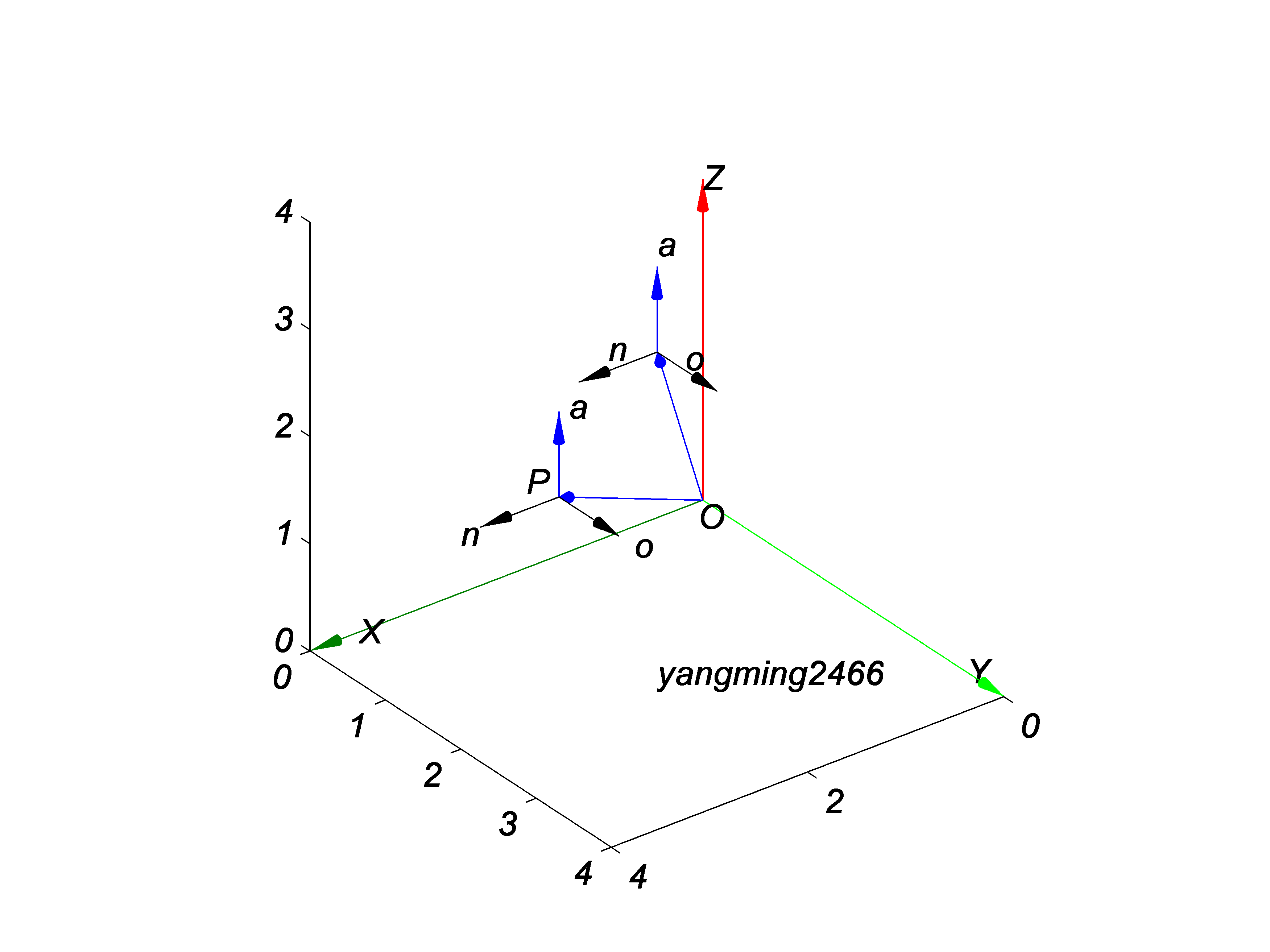
1平移
平移过程中,目标坐标系的空间状态没有发生改变,即目标坐标轴的单位方向向量没有发生改变,但是目标坐标的相对于参考坐标系原点的向量OP会发生变换,新的目标坐标系会通过坐标系左乘
变换矩阵得到。
F为目标坐标系4X4齐次矩阵:
F=[nx ox ax px]
[ny oy ay py]
[nz oz az pz]
[ 0 0 0 1 ]
T为4X4变换矩阵:T = [1 0 0 0 dx] [0 1 0 0 dx]
[0 0 1 0 dx]
[0 0 0 0 1 ]
目标坐标系更新(左乘):Fnew = F X T符号描述为:Fnew = Trans (dx,dy,dz) X Fold;
2绕轴旋转
OP向量坐标为:P = [px py p]'
rx为绕X轴旋转3X3旋转矩阵
rx=[1 0 0 ]
[0 Cosθ -Sinθ]
[0 Sinθ Cosθ]
ry为绕Y轴旋转3X3旋转矩阵
ry=[Cosθ 0 Sinθ ]
[0 1 0 ]
[-Sinθ 0 Cosθ]
rz为绕Z轴旋转3X3旋转矩阵
rz=[Cosθ -Sinθ 0 ]
[Sinθ Cosθ 0 ]
[ 0 0 1 ]
绕X轴旋转θ
Pnew = P x rx
符号表示为:
Pnew = Rot(x,θ)
绕Y轴旋转θ
Pnew = P x ry
符号表示为:
Pnew = Rot(x,θ)
绕Z轴旋转θ
Pnew = P x rx
符号表示为:
Pnew = Rot(x,θ)
3.平移旋转的复合运动
依次左乘相应的平移和旋转量Pnew = Rot(x,θ) X Trans (dx,dy,dz) X FoldMATLAB中直观表示:
需要的基础知识:
1线性代数
2matlab绘图操作
绘图代码:
https://download.csdn.net/download/yangming2466/10291956 点击打开链接

相关文章推荐
- ROS机器人操作系统的安装、配置与初级教程 4
- 重磅报告 | 阿里研究院发布新网商五大预测_2020年诞生第一个机器人网商?
- 你心目中的云产品机器人是什么样?
- 智能小车 机器人
- 51Nod 1119 机器人走方格 组合数学
- 机器人行业分析
- 机器人语言聊天,你猜它都说什么了?
- 使用Phantom omni力反馈设备控制机器人
- 微软面临的最大挑战:怎样支撑、管理亿万智能机器人?
- TensorFlow-Bitcoin-Robot:一个基于 TensorFlow LSTM 模型的 Bitcoin 价格预测机器人。
- 机器人基础——为什么要坐标变换
- 机器人写得诗《全世界就在那里》
- MIT TR 35 Anca Dragan:为了人类与机器人和谐地工作、生活而奋斗
- itchat 把个人的微信号,打造成机器人
- 机器人如何根据它所看到的找到位置
- ROS机器人程序设计——原书第2版(Learning_ROS_for_Robotics_Programming_2nd_edition)
- 基于Mathematica的机器人仿真环境(SLAM篇)
- 【DBSDFZOJ 4370】小宁的机器人(模拟)
- 遗传算法实现机器人寻路
- 机器人轨迹规划