PID控制原理-最简单的原理介绍
2018-03-10 16:54
183 查看
在模拟控制系统中,控制器最常用的控制规律是PID控制。模拟PID控制系统原理框图如下图。系统由模拟PID控制器和被控对象组成。
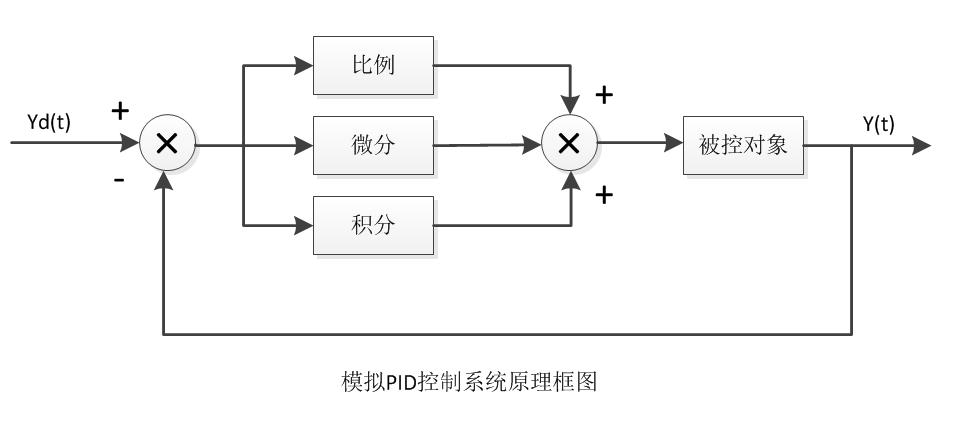
PID控制器是一种线性控制器,它根据给定值Yd(t)与实际输出值Y(t)构成控制偏差:err = Yd - Y . PID的控制规律为:

式中,Kp——比例系数; Ti——积分时间常数; TD——微分时间常数。 简单来说,PID控制器各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号error(t),偏差一旦产生,控制器立即产生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
PID控制器是一种线性控制器,它根据给定值Yd(t)与实际输出值Y(t)构成控制偏差:err = Yd - Y . PID的控制规律为:
式中,Kp——比例系数; Ti——积分时间常数; TD——微分时间常数。 简单来说,PID控制器各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号error(t),偏差一旦产生,控制器立即产生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。

相关文章推荐
- dubbo使用经验及实现原理简单介绍(转载)
- 手机通信原理简单介绍
- dubbo学习过程、使用经验分享及实现原理简单介绍
- Dubbo学习过程、使用经验分享及实现原理简单介绍
- Nginx介绍及原理简单分析
- java中几种Map在什么情况下使用,并简单介绍原因及原理
- HTTPS简单原理介绍
- 【Dubbo基础】dubbo学习过程、使用经验分享及实现原理简单介绍
- 对flash存储器原理的简单介绍
- Git学习笔记1--Git原理简单介绍
- Django框架学习笔记(22.CSRF原理简单介绍)
- dubbo学习过程、使用经验分享及实现原理简单介绍,dubbo经验分享
- HTTPS简单原理介绍
- 简单原理来介绍java编程之反射
- HTTPS简单原理介绍
- LDAP服务器的概念和原理简单介绍
- LDAP服务器的概念和原理简单介绍
- 断点续传简单原理介绍
- K-means聚类算法原理简单介绍
- Dubbo 原理解析-Dubbo 内核实现之 SPI 简单介绍