基于单神经元的自适应PID算法实现步骤与MATLAB代码
2018-03-07 23:46
281 查看
近期研究了下单神经元的自适应PID,发现挺有意思,这里我分享下自己的理解,文中的代码都是来自《先进PID控制MATLAB仿真》第四版 刘金琨编著。
自适应PID的好处在于它的灵活性,而神经网络PID正是因为它的可学习性决定了他的强大性,该文章使用的仅是单神经元,本以为性能可能不会太好,但是仿真发现无论是上升时间亦或是超调量等指标都还不错,拿出来与大家分享。
既然是神经网络PID那就不可以绕开神经网络,网上有很多这方面的讲解,我水平也没各位大神高,小弟就厚着脸皮说说自己的理解,要搞懂还是要去看看各位大神的文章。
神经网络的基本组成是神经元,而神经元也称之为感知器,而貌似无论什么复杂的神经网络都是又这些感知器组成的,而本文章就是用单一感知器这一最基本的神经网络来实现的。
鄙人认为神经网络就是通过不同的权重再经过激活函数来对获得结果,例如最经典的苹果香蕉的例子而至于详细的解释本文就不再叙述了,因为水平有限,不敢献丑,总结来说,神经网络的识别就是对输入施加不同的权重然后通过函数将结果筛选出来,而训练就是通过正确的样本对网络的权重不断更新来得到最合适的权重,有什么问题可以探讨的可通过文末的联系方式一起探讨。
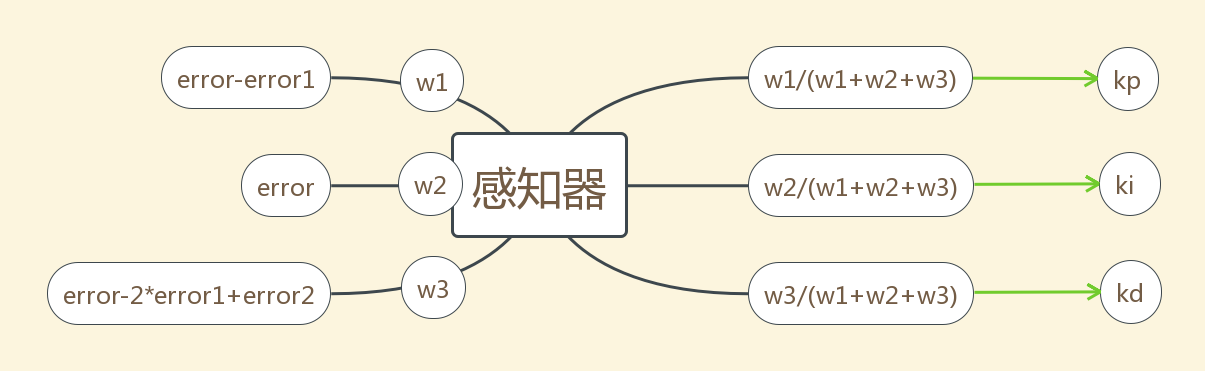
图一 单神经元PID的神经网络
图中神经网络的输入量有三个分别对应的是error-error1、error、error-2*error1-error2;因此不难看出该算法采用的是增量式PID。
公式:

其中x1(k) = e(k)-e(k-1); x2(k) = e(k); x3(k) = e(k)-2*e(k-1)+e(k-2); z(k) = e(k);
其中K是神经元比例系数,K的选择很关键,K越大,快速性越好,但是超调量也大。而3、4、5则是网络的反向传播更新权重的公式。clear all;
clc
x = [0,0,0]'; %定义输入矩阵
xiteP = 0.4; %定义学习速率
xiteI = 0.35;
xiteD = 0.4;
wkp_1 = 0.1; %初始化权重
wki_1 = 0.1;
wkd_1 = 0.1;
erro_1 = 0; %初始化误差
erro_2 = 0;
y_1 = 0;y_2 = 0;y_3 = 0; %初始化被控对象模型
u_1 = 0;u_2 = 0;u_3 = 0;
ts = 0.001; %定义时间步长
for k=1:1:1000 %循环迭代
time(k) = k*ts; %时间为K*ts总时间也就是1
yd(k) = 1; %目标值
if k==100
y(k) = 0.368*y_1+0.264*y_2+0.1*u_1+0.632*u_2+0.2; %当迭代到100次加入扰动0.2
else
y(k) = 0.368*y_1+0.264*y_2+0.1*u_1+0.632*u_2; %被控对象模型
end
erro(k) = yd(k)-y(k); %获取误差
wkp(k) = wkp_1+xiteP*erro(k)*u_1*x(1); %更新权重
wki(k) = wki_1+xiteI*erro(k)*u_1*x(2);
wkd(k) = wkd_1+xiteD*erro(k)*u_1*x(3);
K = 0.12; %定义比例系数
x(1) = erro(k)-erro_1; %给输入矩阵赋值
x(2) = erro(k);
x(3) = erro(k)-2*erro_1+erro_2;
wadd(k) = abs(wkp(k))+abs(wki(k))+abs(wkd(k)); %将权重求和
w11(k) = wkp(k)/wadd(k); %得出P
w22(k) = wki(k)/wadd(k); %I
w33(k) = wkd(k)/wadd(k); %D
w = [w11(k),w22(k),w33(k)];
u(k) = u_1 + K*w*x; %增量式PID
erro_2 = erro_1; %e(k-2)
erro_1 = erro(k);%e(k-1)
u_3 = u_2;u_2 = u_1;u_1 = u(k);
y_3 = y_2;y_2 = y_1;y_1 = y(k);
wkp_1 = wkp(k); %w1(k-1)
wkd_1 = wkd(k);
wki_1 = wki(k);
end
figure(1);
plot(time,yd,'r',time,y,'k','linewidt
894c
h',2);%显示被控模型曲线和设定曲线
xlabel('time(s)');ylabel('yd,y');
legend('ideal position','position tracking');
figure(2);
plot(time,u,'r','linewidth',2); %显示输入PID输出曲线
xlabel('time(s)');ylabel('Control input');
figure(3);
plot(time,w11,'g',time,w22,'r',time,w33,'b','linewidth',2); %显示PID参数调整曲线
xlabel('time(s)');ylabel('PID');
legend('P','I','D');

图2 yd、y曲线

图3 u曲线

图4 PID参数调整曲线
文献1:《先进PID控制MATLAB仿真》第四版 刘金琨编著
有问题探讨可邮件:lingrobepy@gmail.com
如需转载请联系本人,若有侵权可联系本人
自适应PID的好处在于它的灵活性,而神经网络PID正是因为它的可学习性决定了他的强大性,该文章使用的仅是单神经元,本以为性能可能不会太好,但是仿真发现无论是上升时间亦或是超调量等指标都还不错,拿出来与大家分享。
既然是神经网络PID那就不可以绕开神经网络,网上有很多这方面的讲解,我水平也没各位大神高,小弟就厚着脸皮说说自己的理解,要搞懂还是要去看看各位大神的文章。
神经网络的基本组成是神经元,而神经元也称之为感知器,而貌似无论什么复杂的神经网络都是又这些感知器组成的,而本文章就是用单一感知器这一最基本的神经网络来实现的。
鄙人认为神经网络就是通过不同的权重再经过激活函数来对获得结果,例如最经典的苹果香蕉的例子而至于详细的解释本文就不再叙述了,因为水平有限,不敢献丑,总结来说,神经网络的识别就是对输入施加不同的权重然后通过函数将结果筛选出来,而训练就是通过正确的样本对网络的权重不断更新来得到最合适的权重,有什么问题可以探讨的可通过文末的联系方式一起探讨。
图一 单神经元PID的神经网络
图中神经网络的输入量有三个分别对应的是error-error1、error、error-2*error1-error2;因此不难看出该算法采用的是增量式PID。
公式:
其中x1(k) = e(k)-e(k-1); x2(k) = e(k); x3(k) = e(k)-2*e(k-1)+e(k-2); z(k) = e(k);
其中K是神经元比例系数,K的选择很关键,K越大,快速性越好,但是超调量也大。而3、4、5则是网络的反向传播更新权重的公式。clear all;
clc
x = [0,0,0]'; %定义输入矩阵
xiteP = 0.4; %定义学习速率
xiteI = 0.35;
xiteD = 0.4;
wkp_1 = 0.1; %初始化权重
wki_1 = 0.1;
wkd_1 = 0.1;
erro_1 = 0; %初始化误差
erro_2 = 0;
y_1 = 0;y_2 = 0;y_3 = 0; %初始化被控对象模型
u_1 = 0;u_2 = 0;u_3 = 0;
ts = 0.001; %定义时间步长
for k=1:1:1000 %循环迭代
time(k) = k*ts; %时间为K*ts总时间也就是1
yd(k) = 1; %目标值
if k==100
y(k) = 0.368*y_1+0.264*y_2+0.1*u_1+0.632*u_2+0.2; %当迭代到100次加入扰动0.2
else
y(k) = 0.368*y_1+0.264*y_2+0.1*u_1+0.632*u_2; %被控对象模型
end
erro(k) = yd(k)-y(k); %获取误差
wkp(k) = wkp_1+xiteP*erro(k)*u_1*x(1); %更新权重
wki(k) = wki_1+xiteI*erro(k)*u_1*x(2);
wkd(k) = wkd_1+xiteD*erro(k)*u_1*x(3);
K = 0.12; %定义比例系数
x(1) = erro(k)-erro_1; %给输入矩阵赋值
x(2) = erro(k);
x(3) = erro(k)-2*erro_1+erro_2;
wadd(k) = abs(wkp(k))+abs(wki(k))+abs(wkd(k)); %将权重求和
w11(k) = wkp(k)/wadd(k); %得出P
w22(k) = wki(k)/wadd(k); %I
w33(k) = wkd(k)/wadd(k); %D
w = [w11(k),w22(k),w33(k)];
u(k) = u_1 + K*w*x; %增量式PID
erro_2 = erro_1; %e(k-2)
erro_1 = erro(k);%e(k-1)
u_3 = u_2;u_2 = u_1;u_1 = u(k);
y_3 = y_2;y_2 = y_1;y_1 = y(k);
wkp_1 = wkp(k); %w1(k-1)
wkd_1 = wkd(k);
wki_1 = wki(k);
end
figure(1);
plot(time,yd,'r',time,y,'k','linewidt
894c
h',2);%显示被控模型曲线和设定曲线
xlabel('time(s)');ylabel('yd,y');
legend('ideal position','position tracking');
figure(2);
plot(time,u,'r','linewidth',2); %显示输入PID输出曲线
xlabel('time(s)');ylabel('Control input');
figure(3);
plot(time,w11,'g',time,w22,'r',time,w33,'b','linewidth',2); %显示PID参数调整曲线
xlabel('time(s)');ylabel('PID');
legend('P','I','D');
图2 yd、y曲线
图3 u曲线
图4 PID参数调整曲线
文献1:《先进PID控制MATLAB仿真》第四版 刘金琨编著
有问题探讨可邮件:lingrobepy@gmail.com
如需转载请联系本人,若有侵权可联系本人

相关文章推荐
- MATLAB实现基于邻近插值的图像旋转代码
- 多变异位自适应遗传算法(MMAdapGA)的算法原理、算法步骤和matlab实现
- 基于jQuery实现左右div自适应高度完全相同的代码
- 基于模型设计的FPGA开发与实现:滤波器设计与实现(四)Matlab中滤波器HDL代码生成优化
- 基于jQuery实现左右div自适应高度完全相同的代码
- 基于模型设计的FPGA开发与实现:滤波器设计与实现(三)Matlab中滤波器的HDL代码生成
- CSS基于单张背景图实现自适应宽度的圆角菜单效果代码
- 基于jQuery实现左右div自适应高度完全相同实现代码
- 基于jquery实现的一个选择中国大学的弹框 (数据、步骤、代码)
- 基于块的全搜索运动估计算法实现matlab代码
- 基于PCA的人脸识别的Matlab实现代码
- 平台+插件软件设计思想基于COM原型实现的代码剖析
- 基于纯Java代码的Spring容器和Web容器零配置的思考和实现(2) - 静态资源、视图和消息器
- 基于TensorFlow的mnist数据集的最近邻算法实现代码
- 基于用户的协同过滤算法原理分析及代码实现
- 基于jquery实现的表格分页实现代码
- 基于JQuery的Swiper插件实现移动手机端幻灯片切换(可在每一张幻灯片div中插入自定义的元素,代码简介,扩展性好。)
- 举例说明使用MATLAB Coder从MATLAB生成C/C++代码步骤
- 基于lvs的DR模型搭建高可用的web服务,并部署wordpress,(附有脚本实现健康状态检测的代码) 推荐