模糊逻辑控制(上)
2018-01-24 16:29
309 查看
版权声明:本博客参考文献来源于互联网,转载请备注原作链接,欢迎知识共享。
目录(?)[-]
选择观测量和控制量
输入量和输出量的模糊化
制定模糊规则
求解模糊关系
进行模糊决策
控制量的反模糊化
matlab实现
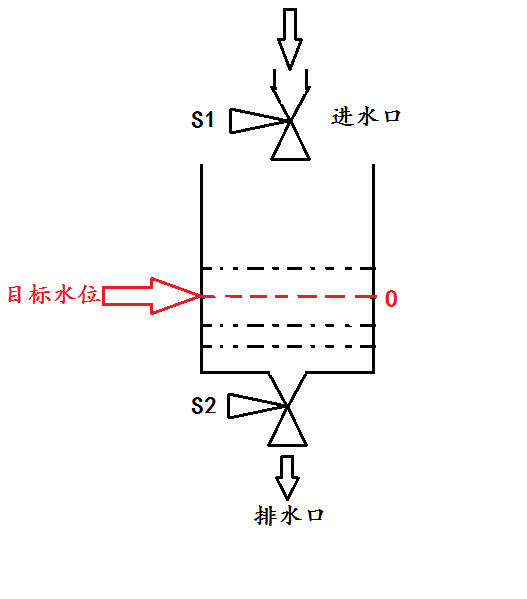
首先来看一个实例,控制进水阀S1和出水阀S2,使水箱水位保持在目标水位O处。
按照日常操作经验,有以下规则:
1、 若当前水位高于目标水位,则向外排水,差值越大,排水越快;
2、 若当前水位低于目标水位,则向内注水,差值越大,注水越快;
3、 若当前水位和目标水位相差很小,则保持排水速度和注水速度相等。
下面来设计一个模糊控制器
偏差e对应的模糊表如下:
同样将控制量u划分为5个模糊集,负大(NB)、负小(NS)、零(ZO)、正小(PS)、正大(PB),u为负表示增大进水阀门S1的开度(同时减小出水阀门S2的开度),u为正表示减小进水阀门S1的开度(同时增大出水阀门S2的开度)。设定u的取值范围为[-4,4],隶属度函数如下。

控制量u对应的模糊表如下:
(1)若e负大,则u负大;
(2)若e负小,则u负小;
(3)若e为零,则u为零;
(4)若e正小,则u正小;
(5)若e正大,则u正大;
将上述用语言描述的规则转化为’’IF A THEN B’’的语句如下:


(1)最大隶属度法----计算简单控制要求不高场合
(2)重心法----输出更平滑
(3)加权平均法----工业上应用最广泛
具体方法的介绍请参照刘金琨《智能控制》一书P45-P46,博文最后会附上书籍相关链接。

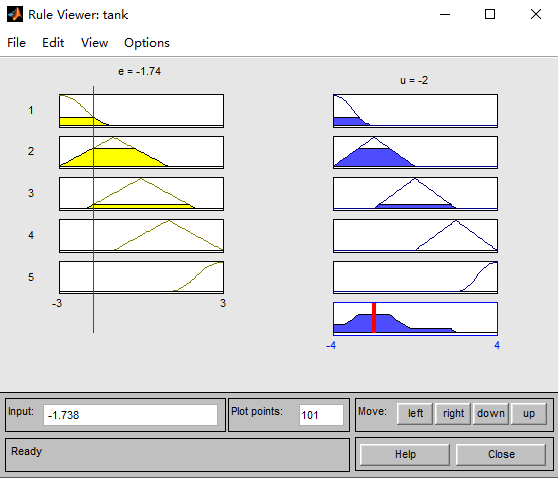
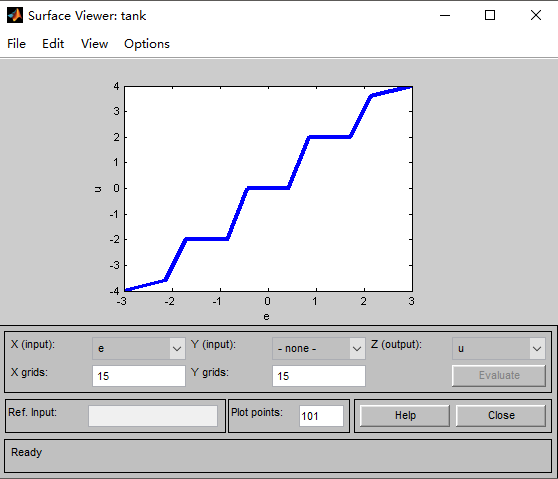
通过matlab集成的模糊控制模块,我们能够更加方便地对应偏差e和控制量u的关系,并可以调节e在不同值下u的对应输出。
Matlab程序
[cpp] view plain copy
print?
%水位模糊控制算法
clear all;
close all;
a = newfis('fuzzy tank');
a = addvar(a,'input','e',[-3,3]);
a = addmf(a,'input',1,'NB','zmf',[-3,-1]);
a =addmf(a,'input',1,'NS','trimf',[-3,-1,1]);
a =addmf(a,'input',1,'ZO','trimf',[-2,0,2]);
a =addmf(a,'input',1,'PS','trimf',[-1,1,3]);
a = addmf(a,'input',1,'PB','smf',[1,3]);
a = addvar(a,'output','u',[-4,4]);
a = addmf(a,'output',1,'NB','zmf',[-4,-2]);
a =addmf(a,'output',1,'NS','trimf',[-4,-2,0]);
a =addmf(a,'output',1,'ZO','trimf',[-2,0,2]);
a =addmf(a,'output',1,'PS','trimf',[0,2,4]);
a = addmf(a,'output',1,'PB','smf',[2,4]);
%建立模糊规则
rulelist=[1 1 1 1;
2 2 1 1;
3 3 1 1;
4 4 1 1;
5 5 1 1];
a = addrule(a,rulelist);
%设置反模糊化算法
a1 = setfis(a,'DefuzzMethod','mom');
writefis(a1,'tank');
a2 = readfis('tank');
figure(1);
plotfis(a2);
figure(2);
plotmf(a,'input',1);
figure(3);
plotmf(a,'output',1);
showrule(a);
ruleview('tank');
for i=1:1:7
e(i)=i-4;
Ulist(i)=evalfis([e(i)],a2);
end
Ulist = round(Ulist); %对决策结果四舍五入取整
disp('------------------------------------------------------');
disp('----------模糊控制表:e =[-3,3], u = [-4,4]-----------');
disp('------------------------------------------------------');
fprintf('| a |');
fprintf(' %d |',e);
fprintf('\n');
fprintf('| u |');
fprintf(' %d |',Ulist);
fprintf('\n');
备注:
1、模糊规则矩阵rulelist的含义:模糊矩阵是由模糊规则转化而来,这里矩阵规模为5*4,矩阵第一列表示输入e(5个模糊集合PB/PS/ZO/NS/NB依次对应1-5),矩阵第二列表示输出u(含义同理),第三列为规则的权重weight,第四列为AND模糊运算(1对应AND,2对应OR),如果是多输入多数出模糊控制器,规则列表的含义请参考:
The first mcolumns refer to the inputs of the system. Each column contains a number thatrefers to the index of the membership function for that variable.
The next n columns refer to the outputs of thesystem. Each column contains a number that refers to the index of themembership function for that variable.
The m + n + 1 column contains the weight that isto be applied to the rule. The weight must be a number between zero and one andis generally left as one.
The m + n + 2 column contains a 1 if the fuzzyoperator for the rule's antecedent is AND. It contains a 2 if the fuzzyoperator is OR.
2、设置反模糊化方法setfis(a,'DefuzzMethod','mom');反模糊化方法不同最终输出控制量也不同。
mom 最大隶属度平均法
centroid 面积重心法
bisector 面积等分法
som 最大隶属度取小法
lom 最大隶属度去大法
3、如果要对决策结果取整有三种方法:round(四舍五入)、ceil(向上取整)、floor(向下取整)。
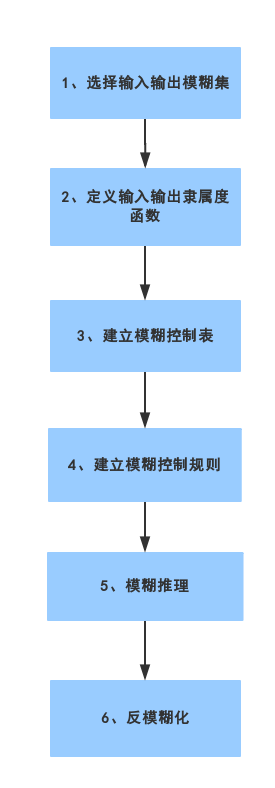
最后总结一下模糊控制器的设计步骤:
参考书籍:
刘金琨《智能控制》
目录(?)[-]
选择观测量和控制量
输入量和输出量的模糊化
制定模糊规则
求解模糊关系
进行模糊决策
控制量的反模糊化
matlab实现
首先来看一个实例,控制进水阀S1和出水阀S2,使水箱水位保持在目标水位O处。
按照日常操作经验,有以下规则:
1、 若当前水位高于目标水位,则向外排水,差值越大,排水越快;
2、 若当前水位低于目标水位,则向内注水,差值越大,注水越快;
3、 若当前水位和目标水位相差很小,则保持排水速度和注水速度相等。
下面来设计一个模糊控制器
1、选择观测量和控制量
一般选择偏差e,即目标水位和当前水位的差值作为观察量,选取阀门开度u为控制量。2、输入量和输出量的模糊化
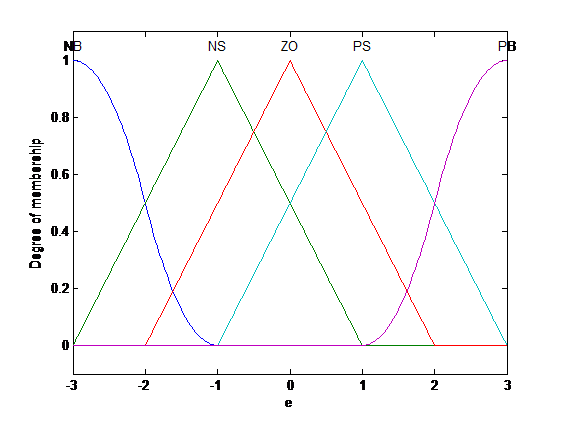
将偏差e划分为5个模糊集,负大(NB)、负小(NS)、零(ZO)、正小(PS)、正大(PB),e为负表示当前水位低于目标水位,e为正表示当前水位高于目标水位。设定e的取值范围为[-3,3],隶属度函数如下。偏差e对应的模糊表如下:
| 隶属度 | 变化等级 | |||||||
| -3 | -2 | -1 | 0 | 1 | 2 | 3 | ||
| 模糊集 | PB | 0 | 0 | 0 | 0 | 0 | 0.5 | 1 |
| PS | 0 | 0 | 0 | 0.5 | 1 | 0.5 | 0 | |
| ZO | 0 | 0 | 0.5 | 1 | 0.5 | 0 | 0 | |
| NS | 0 | 0.5 | 1 | 0.5 | 0 | 0 | 0 | |
| NB | 1 | 0.5 | 0 | 0 | 0 | 0 | 0 |
同样将控制量u划分为5个模糊集,负大(NB)、负小(NS)、零(ZO)、正小(PS)、正大(PB),u为负表示增大进水阀门S1的开度(同时减小出水阀门S2的开度),u为正表示减小进水阀门S1的开度(同时增大出水阀门S2的开度)。设定u的取值范围为[-4,4],隶属度函数如下。
控制量u对应的模糊表如下:
| 隶属度 | 变化等级 | |||||||||
| -4 | -3 | -2 | -1 | 0 | 1 | 2 | 3 | 4 | ||
| 模糊集 | PB | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0.5 | 1 |
| PS | 0 | 0 | 0 | 0 | 0 | 0.5 | 1 | 0.5 | 0 | |
| ZO | 0 | 0 | 0 | 0.5 | 1 | 0.5 | 0 | 0 | 0 | |
| NS | 0 | 0.5 | 1 | 0.5 | 0 | 0 | 0 | 0 | 0 | |
| NB | 1 | 0.5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
3、制定模糊规则
模糊规则的制定是模糊控制的核心内容,控制性能的好坏很大程度上由模糊规则决定,目前主要是根据经验来制定相应的规则。【后面可以结合神经网络来学习模糊规则】(1)若e负大,则u负大;
(2)若e负小,则u负小;
(3)若e为零,则u为零;
(4)若e正小,则u正小;
(5)若e正大,则u正大;
将上述用语言描述的规则转化为’’IF A THEN B’’的语句如下:
4、求解模糊关系
根据制定的模糊规则,通过相应的模糊集合运算,可得到模糊关系集合R。5、进行模糊决策
我们最终需要获得的控制量u即为模糊控制的输出,u可由偏差矩阵e和模糊关系矩阵R合成得到。6、控制量的反模糊化
我们模糊决策得到的控制量u是一个矩阵,并不能直接应用在工程上,因此需要将u解释为实际中的特定行为,即反模糊化操作。目前常用的反模糊化方法有以下几种:(1)最大隶属度法----计算简单控制要求不高场合
(2)重心法----输出更平滑
(3)加权平均法----工业上应用最广泛
具体方法的介绍请参照刘金琨《智能控制》一书P45-P46,博文最后会附上书籍相关链接。
7、matlab实现
所幸的是,在matlab模糊控制工具箱中已经帮我们实现了4-6步求解矩阵运算的操作,只需要直接调用evalfis函数就可以得到相应的决策控制量。通过matlab集成的模糊控制模块,我们能够更加方便地对应偏差e和控制量u的关系,并可以调节e在不同值下u的对应输出。
Matlab程序
[cpp] view plain copy
print?
%水位模糊控制算法
clear all;
close all;
a = newfis('fuzzy tank');
a = addvar(a,'input','e',[-3,3]);
a = addmf(a,'input',1,'NB','zmf',[-3,-1]);
a =addmf(a,'input',1,'NS','trimf',[-3,-1,1]);
a =addmf(a,'input',1,'ZO','trimf',[-2,0,2]);
a =addmf(a,'input',1,'PS','trimf',[-1,1,3]);
a = addmf(a,'input',1,'PB','smf',[1,3]);
a = addvar(a,'output','u',[-4,4]);
a = addmf(a,'output',1,'NB','zmf',[-4,-2]);
a =addmf(a,'output',1,'NS','trimf',[-4,-2,0]);
a =addmf(a,'output',1,'ZO','trimf',[-2,0,2]);
a =addmf(a,'output',1,'PS','trimf',[0,2,4]);
a = addmf(a,'output',1,'PB','smf',[2,4]);
%建立模糊规则
rulelist=[1 1 1 1;
2 2 1 1;
3 3 1 1;
4 4 1 1;
5 5 1 1];
a = addrule(a,rulelist);
%设置反模糊化算法
a1 = setfis(a,'DefuzzMethod','mom');
writefis(a1,'tank');
a2 = readfis('tank');
figure(1);
plotfis(a2);
figure(2);
plotmf(a,'input',1);
figure(3);
plotmf(a,'output',1);
showrule(a);
ruleview('tank');
for i=1:1:7
e(i)=i-4;
Ulist(i)=evalfis([e(i)],a2);
end
Ulist = round(Ulist); %对决策结果四舍五入取整
disp('------------------------------------------------------');
disp('----------模糊控制表:e =[-3,3], u = [-4,4]-----------');
disp('------------------------------------------------------');
fprintf('| a |');
fprintf(' %d |',e);
fprintf('\n');
fprintf('| u |');
fprintf(' %d |',Ulist);
fprintf('\n');
备注:
1、模糊规则矩阵rulelist的含义:模糊矩阵是由模糊规则转化而来,这里矩阵规模为5*4,矩阵第一列表示输入e(5个模糊集合PB/PS/ZO/NS/NB依次对应1-5),矩阵第二列表示输出u(含义同理),第三列为规则的权重weight,第四列为AND模糊运算(1对应AND,2对应OR),如果是多输入多数出模糊控制器,规则列表的含义请参考:
The first mcolumns refer to the inputs of the system. Each column contains a number thatrefers to the index of the membership function for that variable.
The next n columns refer to the outputs of thesystem. Each column contains a number that refers to the index of themembership function for that variable.
The m + n + 1 column contains the weight that isto be applied to the rule. The weight must be a number between zero and one andis generally left as one.
The m + n + 2 column contains a 1 if the fuzzyoperator for the rule's antecedent is AND. It contains a 2 if the fuzzyoperator is OR.
2、设置反模糊化方法setfis(a,'DefuzzMethod','mom');反模糊化方法不同最终输出控制量也不同。
mom 最大隶属度平均法
centroid 面积重心法
bisector 面积等分法
som 最大隶属度取小法
lom 最大隶属度去大法
3、如果要对决策结果取整有三种方法:round(四舍五入)、ceil(向上取整)、floor(向下取整)。
最后总结一下模糊控制器的设计步骤:
参考书籍:
刘金琨《智能控制》

相关文章推荐
- 移动机器人运动控制的模糊逻辑系统设计
- 移植Matlab的底层模糊逻辑控制库(C语言)
- 模糊逻辑控制(下)
- 移植Matlab的底层模糊逻辑控制库(C语言)
- MOSS字段编辑权限控制方案(3)-重写表单字段呈现逻辑
- lua-2 逻辑控制和函数
- EAS8.0,WAF2,JS,列表界面选择记录行,请求控制层逻辑,刷新界面
- 从模糊逻辑中走出来的属性数学
- 逻辑运算和判断选取控制
- 7、程序逻辑控制
- 模糊逻辑与逻辑推理
- 如何利用matlab将模糊逻辑转化为查询表
- MySql存储过程—逻辑判断,条件控制,循环控制
- 控制物体是否运动的逻辑
- 小Y的Python学习日志--流程控制(逻辑符)
- python逻辑控制
- 黑马程序员 《ios零基础教程》 ---sizeof、关系运算符、逻辑运算和三目运算和流程控制if选择结构 2014-3-21总结
- 大恶人吉日嘎拉之走火入魔闭门造车之.NET疯狂架构经验分享系列之(一)后台控制逻辑代码部分
- MOSS字段编辑权限控制方案(3)-重写表单字段呈现逻辑
- SQL server学习(三)T-SQL编程、逻辑控制语句和安全模式