论文学习-从感知到决策:一种自动地面机器人的端到端运动规划的数据驱动方法
2018-01-02 09:26
405 查看
首先整理一下卷积神经网络吧,我先看了一下知乎机器之心的回答 https://www.zhihu.com/question/52668301。
卷积层与过滤器,是为了提取特征,层数越深,特征越高级。“随着进入网络越深和经过更多卷积层后,你将得到更为复杂特征的激活映射。在网络的最后,可能会有一些过滤器会在看到手写笔迹或粉红物体等时激活。有趣的是,越深入网络,过滤器的感受野越大,意味着它们能够处理更大范围的原始输入内容(或者说它们可以对更大区域的像素空间产生反应)。完全连接层观察高级特征和哪一分类最为吻合和拥有怎样的特定权重,因此当计算出权重与先前层之间的点积后,你将得到不同分类的正确概率。计算机通过一个名为反向传播的训练过程来调整过滤器值(或权重)。”
“反向传播可分为四部分,分别是前向传导、损失函数、后向传导,以及权重更新。”
“学习速率是一个由程序员决定的参数。高学习速率意味着权重更新的动作更大,因此可能该模式将花费更少的时间收敛到最优权重。然而,学习速率过高会导致跳动过大,不够准确以致于达不到最优点。”学习率在强化学习的Qlearning法也提到了。
“总的来说,前向传导、损失函数、后向传导、以及参数更新被称为一个学习周期。对每一训练图片,程序将重复固定数目的周期过程。一旦完成了最后训练样本上的参数更新,网络有望得到足够好的训练,以便层级中的权重得到正确调整。”
ReLU(修正线性单元)层。
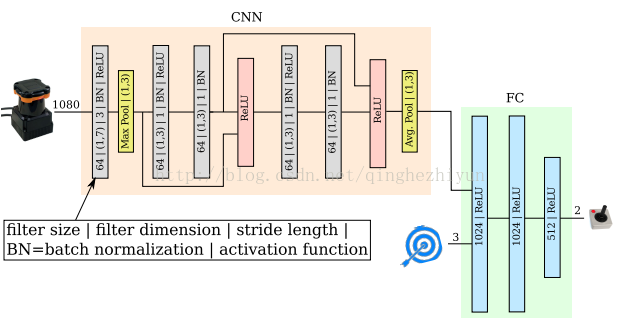
现在看这篇论文,主要讲了一种端到端的机器人局部运动规划方法,采用卷积神经网络模型。这个模型以二维激光测距值和给定的相对目标点坐标为输入,相对目标位置就是在以机器人为原点的坐标系中目标(极坐标)的位置。先用一个CNN处理激光数据,然后将该子网络的输出与目标位置信息融合,并交由模型的FC层处理,最终输出一个二维的速度向量指令,包括平移(m/s)与旋转速度(rad/s)(角速度应该事先定义了方向)。这个模型分为两种,一个是有大FC层的CNN,一个是小FC层的CNN。
首先为了减少人力,由现有的ROS全局运动规划器(motion planner)作为expert planner 仿真生成一系列带有标签的训练数据,去训练这个模型。此模型的特点是逐帧计算运动指令,不需要记忆过去的信息。
IV-C: 作者在仿真实验中只使用train地图的数据进行训练。测试时在train/ecal1/eval2上都各测试30次,比较deep planner与ROS planner的速度误差。同时这个实验结果显示,deep planner能学习一个场景及其导航知识,并应用到另一个场景中。但这个误差必须逐帧分析。
IV-D:提及了几个轨迹评价指标,在train地图上两个planner轨迹基本一致,且deep各指标都优于ROS。在eval1地图上,大部分一致,但在转动能量与定位距离上deep稍微逊色,但也能说明此模型可以适用不同环境。
IV-E:以上都是仿真测试,下面实物测试。这里用train和eval2的数据一起训练模型。这里发现增大FC层可以提高现实世界的导航性能(所需人为干预变少)。deep大体轨迹还是与ROS相似,只是反应时间变长,转弯会更宽。
IV-F:突发障碍定性测试。这里可以看做是动态避障,突然出现一个障碍或移除一个障碍。当然动态避障也可以认为与静态避障类似,因为静止也是运动,激光传感器测得的是相对运动距离,本质上一致。
卷积层与过滤器,是为了提取特征,层数越深,特征越高级。“随着进入网络越深和经过更多卷积层后,你将得到更为复杂特征的激活映射。在网络的最后,可能会有一些过滤器会在看到手写笔迹或粉红物体等时激活。有趣的是,越深入网络,过滤器的感受野越大,意味着它们能够处理更大范围的原始输入内容(或者说它们可以对更大区域的像素空间产生反应)。完全连接层观察高级特征和哪一分类最为吻合和拥有怎样的特定权重,因此当计算出权重与先前层之间的点积后,你将得到不同分类的正确概率。计算机通过一个名为反向传播的训练过程来调整过滤器值(或权重)。”
“反向传播可分为四部分,分别是前向传导、损失函数、后向传导,以及权重更新。”
“学习速率是一个由程序员决定的参数。高学习速率意味着权重更新的动作更大,因此可能该模式将花费更少的时间收敛到最优权重。然而,学习速率过高会导致跳动过大,不够准确以致于达不到最优点。”学习率在强化学习的Qlearning法也提到了。
“总的来说,前向传导、损失函数、后向传导、以及参数更新被称为一个学习周期。对每一训练图片,程序将重复固定数目的周期过程。一旦完成了最后训练样本上的参数更新,网络有望得到足够好的训练,以便层级中的权重得到正确调整。”
ReLU(修正线性单元)层。
现在看这篇论文,主要讲了一种端到端的机器人局部运动规划方法,采用卷积神经网络模型。这个模型以二维激光测距值和给定的相对目标点坐标为输入,相对目标位置就是在以机器人为原点的坐标系中目标(极坐标)的位置。先用一个CNN处理激光数据,然后将该子网络的输出与目标位置信息融合,并交由模型的FC层处理,最终输出一个二维的速度向量指令,包括平移(m/s)与旋转速度(rad/s)(角速度应该事先定义了方向)。这个模型分为两种,一个是有大FC层的CNN,一个是小FC层的CNN。
首先为了减少人力,由现有的ROS全局运动规划器(motion planner)作为expert planner 仿真生成一系列带有标签的训练数据,去训练这个模型。此模型的特点是逐帧计算运动指令,不需要记忆过去的信息。
IV-C: 作者在仿真实验中只使用train地图的数据进行训练。测试时在train/ecal1/eval2上都各测试30次,比较deep planner与ROS planner的速度误差。同时这个实验结果显示,deep planner能学习一个场景及其导航知识,并应用到另一个场景中。但这个误差必须逐帧分析。
IV-D:提及了几个轨迹评价指标,在train地图上两个planner轨迹基本一致,且deep各指标都优于ROS。在eval1地图上,大部分一致,但在转动能量与定位距离上deep稍微逊色,但也能说明此模型可以适用不同环境。
IV-E:以上都是仿真测试,下面实物测试。这里用train和eval2的数据一起训练模型。这里发现增大FC层可以提高现实世界的导航性能(所需人为干预变少)。deep大体轨迹还是与ROS相似,只是反应时间变长,转弯会更宽。
IV-F:突发障碍定性测试。这里可以看做是动态避障,突然出现一个障碍或移除一个障碍。当然动态避障也可以认为与静态避障类似,因为静止也是运动,激光传感器测得的是相对运动距离,本质上一致。

相关文章推荐
- 一种自动分类数据方法2_判断模型好坏_学习曲线 luikimfai
- 一种自动分类数据方法_初探索
- 【工业大数据】大数据驱动的智能车间运行分析与决策方法体系
- 一种自动处理数据表的方法
- [论文学习]An Effective Approach for Mining Mobile User Habits:一种高效挖掘移动用户习惯的方法
- CS231n 学习笔记(1)——神经网络 part1 :图像分类与数据驱动方法
- 一种机器人感知空间与智主行走的建模识别方法
- 一种自动记录用户行为数据的实现方法
- 一种有效的压缩感知方法——读Levin论文笔记
- Sql 学习记录 一种删除重复数据的方法
- 网格方法——一种运动规划方法
- zt ASP学习史上最强的数据分页方法
- 本文介绍了一种利用Repeater控件显示主-从关系数据表的方法。
- ASP.NET2.0中 TreeView 和ORACLE 数据绑定的一种方法
- [Source Code]学习了一种比较经典的遍历XML文件的方法
- 有没有一种方法可以将文件和数据从硬盘完全清除
- 将具有固定格式的text 类型中的数据分离出来的一种方法
- asp.net中执行存储数据操作时数据被自动截取的一种情况
- 在Fedora Core 5 Test3下装nVidia显示驱动的一种方法,也许正式版也用的上哦!
- 一种使用递归从数据库读取数据来动态建立菜单的方法