MIT高级算法之并行计算
2017-09-30 04:09
141 查看
MIT高级算法
2017/9/29
by
CHENJING DING
CHAPTER1 – 并行计算 Parallel algorithms
注:本篇文章是MIT高级算法课程中的并行计算课程的笔记,其中红色下划线部分为本人拓展部分,如有错误,欢迎指正。对算法和公式部分的推导也做了尽可能详细的展示,希望能一起交流啦~
我们有很多并行算法的模型(models),对于串行算法(serialalgorithms)而言,一般只有一种基础模型:随机存取机器模型(randomaccess machine model)。下文介绍的是动态多线程(Dynamicmultithreading),适合用于多核机器(multicore machines)。它是为内存共享(sharedmemory)的编程而设计的,不适用于分布式内存编程(distributedmemory programs)。因为每个处理器都有访问内存的权限。
学习调度(scheduling)前的基础知识
计算第n个斐波拉契数的模型(不用弄清楚如何计算)。伪程序(pseudocode)代码如图所示:
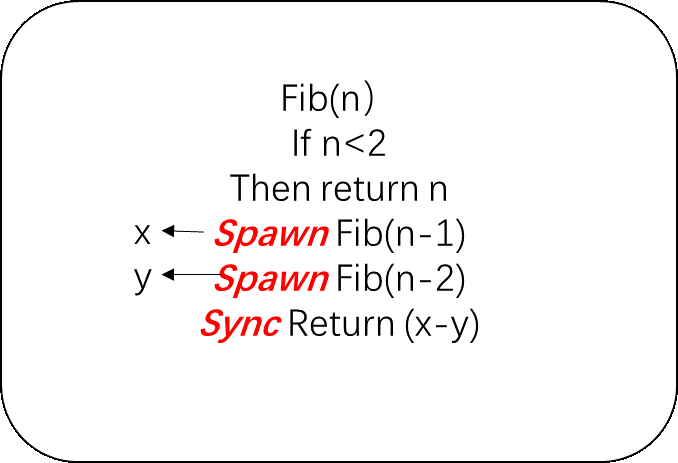
衍生Spwan:子程序(subroutine)可以和父程序一起执行。比如程序执行到Fib(n-1),会产生子程序的同时也会执行下一句Fib(n-2)。
同步Sync:等待所有子程序完成。必须等到所有x和y都计算出来,才能计算x-y。
下面需要用调度器(schedule)决定如何把这个动态不断衍生的程序映射到可用的处理器上。
并行指令流
并行指令流(parallelinstruction)是一个有向非循环图(DAG: directed acyclic graph)。
在这个图中,顶点(vertices)代表线程(threads)。
线程:最长的指令序列(maximal sequences ofinstructions),该序列不包含任何并行控制(spawn,sync,以及从一个衍生的子程序返回)
则上述程序可化为三个顶点,即三个线程。
A:从程序开始到求Fib(n-1)为止,也就是恰好在做子任务跳转前一步
B:在跳转到Fib(n-2)前一步
C:计算x-y
在当前最长的串行指令序列执行时,到执行并行指令时(spawn,sync,以及从一个衍生的子程序返回)就会结束当前的线程,所以我们可以把上述问题看成是三个线程组合。
下面假设我们计算Fib(4),水平的椭圆对应的是程序的执行。其中Fib注释的为当前A线程计算的FIB()值







我们有三条边,分别是继续边,衍生边和返回边。
性能测算(Performance measures)
Tp = 在P个处理器上的运行时间(runningtime)。不是一个常熟,因为不同的调度规则会得到不同的Tp。
T1 = 一个处理器上运行的时间,即为串行运行时间(theserial time)。一个线程在一个处理器上运行的时间称为功。当去掉上述并行指令流(spawn,sync,以及从一个衍生的子程序返回,即衍生边和继续边不能一起同时执行),则上述DAG中有多少节点,就为执行了多少个线程。
T_∞= 关键路径长度(thecritical pathlength),DAG中最长的路径。即处理器有无数多个,运行程序所用的时间。
假设线程的运行时间是一个单位时间,则上述例子中,T1= 17。 T_∞ = 8(如下图灰色节点部分所示,因为这些节点没有办法同时运行,只有运行完父程序的A线程才能执行A线程的衍生程序)。

Tp的下界
T_p>=T1/P。因为P个处理器在一个线程的单位时间内最多做P功(就是每个处理器分别运行一个线程,一共可以运行P个线程)。所以,当功的总量为T1.一共至少要T1/p个线程运行时间。
Tp≥T_∞ . 在一段时间内用P个处理器运行完的程序,当然也可以用无数个处理器运行完。并且P个处理器做的功不可能比无数个处理器做的功还要多
加速比
T1/Tp = 为P个处理器的加速比(speedup),表示P个处理器比单处理器要快多少。
如果T1/Tp=O(p),称为线性加速。即 lim【(T1/Tp)/P】=0,可以理解为T1/Tp在关于P的数量级上小于或等于P,所以T1/Tp关于P的数量级为1或0,即T1/Tp<p
T1/Tp > P 为超级线性加速,是不能发生的。因为Tp的下界为T1>P。
最大加速比和并行度
最大加速比为T1 / T_∞(因为 Tp≥T_∞)。将其称为并行度(parallelism)。
所以并行度 = 功/关键路径的长度。就是在关键路径长度上可以并行完成的功的平均分量。用 P ̅表示。注意 P ̅与P没有任何关系, P ̅是计算量,P是处理器数目。
调度(scheduling)
调度的目的:由编程语言的运行时系统(aruntime system)完成的,将计算分配到P个处理器。
离线调度算法(theoff-line schedulers):
贪心调度(Greedyscheduler)
思想:
每一次调度要尽可能使所有处理器都运行程序。分别对应两种情况:
最大完整步骤(complete steps):至少有P个线程准备执行,如果没有处理器(总个数为P个)闲置,则称为此次执行为最大完整步骤。则执行任意P个线程。Tp >=T1/P 。因为每一步完整步骤都做了P的功。
不完整步骤(incomplete steps):有少于P个线程准备执行,则执行所有线程。
定理:
一个贪婪调度算法执行任意计算DAG G,若功为T1,关键路径长为T_∞ ,那么它的运行时间Tp=< T1/P + T_∞(在p个处理器上运行)。实际上Tp<2倍以内最优调度时间(因为T1/P,T_∞都是调度时间的下届,都是最优调度时间,取其中最大值)
下面来证明:
令G’为G其中一个要被执行的子图,令P= 3; G’为还没有执行的线程顶点以及边组成的图(下图中黄色和黑色顶点)。灰色节点表示已经执行完的顶点。再次假设每个线程的运行时间是单位化的。在图G‘中,当一个顶点的入度为0时,则为将要执行的节点。橘黄色节点为下一次即将要执行的节点,因为只有两个,小于P,则下一次执行的是不完整步骤。

图 G
每一次执行完不完整的步骤,G‘要执行的关键路径要减去1。下图中即将执行的是完整步骤(黄色顶点个数大于P),G‘要执行的关键路径不变,除非4个节点都执行完,G‘要执行的关键路径才减去1。

所以,不完整步骤的个数小于T_∞ 。
综上,p个处理器做T1功所需的步骤数目Tp<= 最大完整步骤T1/P+最大不完整的步骤 T_∞。
推论:
如果运行的处理器个数是以并行度 为阶(即小于或等于 )的话,则可以得到线性的加速比,所以如果你的处理器数量是等于或少于并行度的话,贪婪调度算法能给你带来线性的加速。

(2)式表明如果处理器数量小于或等于并行度,则由(6)式可得用贪婪调度可得线性的加速。如果处理器的数量大于并行度,则浪费了,因为不可能存在超线性加速的情况。
所以,并行度可以理解为用贪婪调度实现线性加速的处理器数量的极限。
2017/9/29
by
CHENJING DING
CHAPTER1 – 并行计算 Parallel algorithms
注:本篇文章是MIT高级算法课程中的并行计算课程的笔记,其中红色下划线部分为本人拓展部分,如有错误,欢迎指正。对算法和公式部分的推导也做了尽可能详细的展示,希望能一起交流啦~
我们有很多并行算法的模型(models),对于串行算法(serialalgorithms)而言,一般只有一种基础模型:随机存取机器模型(randomaccess machine model)。下文介绍的是动态多线程(Dynamicmultithreading),适合用于多核机器(multicore machines)。它是为内存共享(sharedmemory)的编程而设计的,不适用于分布式内存编程(distributedmemory programs)。因为每个处理器都有访问内存的权限。
学习调度(scheduling)前的基础知识
计算第n个斐波拉契数的模型(不用弄清楚如何计算)。伪程序(pseudocode)代码如图所示:
衍生Spwan:子程序(subroutine)可以和父程序一起执行。比如程序执行到Fib(n-1),会产生子程序的同时也会执行下一句Fib(n-2)。
同步Sync:等待所有子程序完成。必须等到所有x和y都计算出来,才能计算x-y。
下面需要用调度器(schedule)决定如何把这个动态不断衍生的程序映射到可用的处理器上。
并行指令流
并行指令流(parallelinstruction)是一个有向非循环图(DAG: directed acyclic graph)。
在这个图中,顶点(vertices)代表线程(threads)。
线程:最长的指令序列(maximal sequences ofinstructions),该序列不包含任何并行控制(spawn,sync,以及从一个衍生的子程序返回)
则上述程序可化为三个顶点,即三个线程。
A:从程序开始到求Fib(n-1)为止,也就是恰好在做子任务跳转前一步
B:在跳转到Fib(n-2)前一步
C:计算x-y
在当前最长的串行指令序列执行时,到执行并行指令时(spawn,sync,以及从一个衍生的子程序返回)就会结束当前的线程,所以我们可以把上述问题看成是三个线程组合。
下面假设我们计算Fib(4),水平的椭圆对应的是程序的执行。其中Fib注释的为当前A线程计算的FIB()值
我们有三条边,分别是继续边,衍生边和返回边。
性能测算(Performance measures)
Tp = 在P个处理器上的运行时间(runningtime)。不是一个常熟,因为不同的调度规则会得到不同的Tp。
T1 = 一个处理器上运行的时间,即为串行运行时间(theserial time)。一个线程在一个处理器上运行的时间称为功。当去掉上述并行指令流(spawn,sync,以及从一个衍生的子程序返回,即衍生边和继续边不能一起同时执行),则上述DAG中有多少节点,就为执行了多少个线程。
T_∞= 关键路径长度(thecritical pathlength),DAG中最长的路径。即处理器有无数多个,运行程序所用的时间。
假设线程的运行时间是一个单位时间,则上述例子中,T1= 17。 T_∞ = 8(如下图灰色节点部分所示,因为这些节点没有办法同时运行,只有运行完父程序的A线程才能执行A线程的衍生程序)。
Tp的下界
T_p>=T1/P。因为P个处理器在一个线程的单位时间内最多做P功(就是每个处理器分别运行一个线程,一共可以运行P个线程)。所以,当功的总量为T1.一共至少要T1/p个线程运行时间。
Tp≥T_∞ . 在一段时间内用P个处理器运行完的程序,当然也可以用无数个处理器运行完。并且P个处理器做的功不可能比无数个处理器做的功还要多
加速比
T1/Tp = 为P个处理器的加速比(speedup),表示P个处理器比单处理器要快多少。
如果T1/Tp=O(p),称为线性加速。即 lim【(T1/Tp)/P】=0,可以理解为T1/Tp在关于P的数量级上小于或等于P,所以T1/Tp关于P的数量级为1或0,即T1/Tp<p
T1/Tp > P 为超级线性加速,是不能发生的。因为Tp的下界为T1>P。
最大加速比和并行度
最大加速比为T1 / T_∞(因为 Tp≥T_∞)。将其称为并行度(parallelism)。
所以并行度 = 功/关键路径的长度。就是在关键路径长度上可以并行完成的功的平均分量。用 P ̅表示。注意 P ̅与P没有任何关系, P ̅是计算量,P是处理器数目。
调度(scheduling)
调度的目的:由编程语言的运行时系统(aruntime system)完成的,将计算分配到P个处理器。
离线调度算法(theoff-line schedulers):
贪心调度(Greedyscheduler)
思想:
每一次调度要尽可能使所有处理器都运行程序。分别对应两种情况:
最大完整步骤(complete steps):至少有P个线程准备执行,如果没有处理器(总个数为P个)闲置,则称为此次执行为最大完整步骤。则执行任意P个线程。Tp >=T1/P 。因为每一步完整步骤都做了P的功。
不完整步骤(incomplete steps):有少于P个线程准备执行,则执行所有线程。
定理:
一个贪婪调度算法执行任意计算DAG G,若功为T1,关键路径长为T_∞ ,那么它的运行时间Tp=< T1/P + T_∞(在p个处理器上运行)。实际上Tp<2倍以内最优调度时间(因为T1/P,T_∞都是调度时间的下届,都是最优调度时间,取其中最大值)
下面来证明:
令G’为G其中一个要被执行的子图,令P= 3; G’为还没有执行的线程顶点以及边组成的图(下图中黄色和黑色顶点)。灰色节点表示已经执行完的顶点。再次假设每个线程的运行时间是单位化的。在图G‘中,当一个顶点的入度为0时,则为将要执行的节点。橘黄色节点为下一次即将要执行的节点,因为只有两个,小于P,则下一次执行的是不完整步骤。
图 G
每一次执行完不完整的步骤,G‘要执行的关键路径要减去1。下图中即将执行的是完整步骤(黄色顶点个数大于P),G‘要执行的关键路径不变,除非4个节点都执行完,G‘要执行的关键路径才减去1。
所以,不完整步骤的个数小于T_∞ 。
综上,p个处理器做T1功所需的步骤数目Tp<= 最大完整步骤T1/P+最大不完整的步骤 T_∞。
推论:
如果运行的处理器个数是以并行度 为阶(即小于或等于 )的话,则可以得到线性的加速比,所以如果你的处理器数量是等于或少于并行度的话,贪婪调度算法能给你带来线性的加速。
(2)式表明如果处理器数量小于或等于并行度,则由(6)式可得用贪婪调度可得线性的加速。如果处理器的数量大于并行度,则浪费了,因为不可能存在超线性加速的情况。
所以,并行度可以理解为用贪婪调度实现线性加速的处理器数量的极限。

相关文章推荐
- 串行fft 源于并行计算——结构。算法。编程中伪码
- MPI实现fft的迭代算法 源于并行计算——结构。算法。编程中伪码
- 转置矩阵的分块并行乘法(C语言实现),计算矩阵C[rawn][rawn]=A[rawm][rawn]'*B[rawm][rawn],子块大小为S*T,其算法实现原理参加本代码的附件。
- 上算法设计课-----关于并行计算有感
- 利用高级Java、算法、三角学、分布计算设计自己的智能机器人
- 利用高级Java、算法、三角学、分布计算设计自己的智能
- MPI实现fft的迭代算法 源于并行计算——结构。算法。编程中伪码 更新1
- MIT高级算法公开课视频(无字幕),需要自取-"http://yun.baidu.com/s/1dSPsi“
- MPI实现fft的迭代算法 源于并行计算——结构。算法。编程中伪码 更新2
- 基于矩阵分解的推荐算法-梯度下降算法-非并行计算[转载]
- 并行计算复习————第三篇 并行计算理论基础:并行数值算法
- Java高级知识点:并行计算(外部排序) 及 死锁分析
- 单核单线程、单核多线程、多核多线程以及并行计算对大数据和复杂算法的简单效应
- 分布式存储和并行计算算法与海量数据分析-本科优秀毕业论文摘要
- MPI实现fft的迭代算法 源于并行计算——结构。算法。编程中伪码 更新3
- 利用高级Java、算法、三角学、分布计算设计自己的智能机器人--(重锤痛击续2)
- 机器学习基础(五十九)—— 高级优化算法(梯度下降、L-BFGS、共轭梯度)
- java根据经纬度坐标计算两点的距离算法,与百度地图测距工具相符
- 分布式计算和并行计算的异同
- C# CRC8直接计算算法实现