您的位置:首页
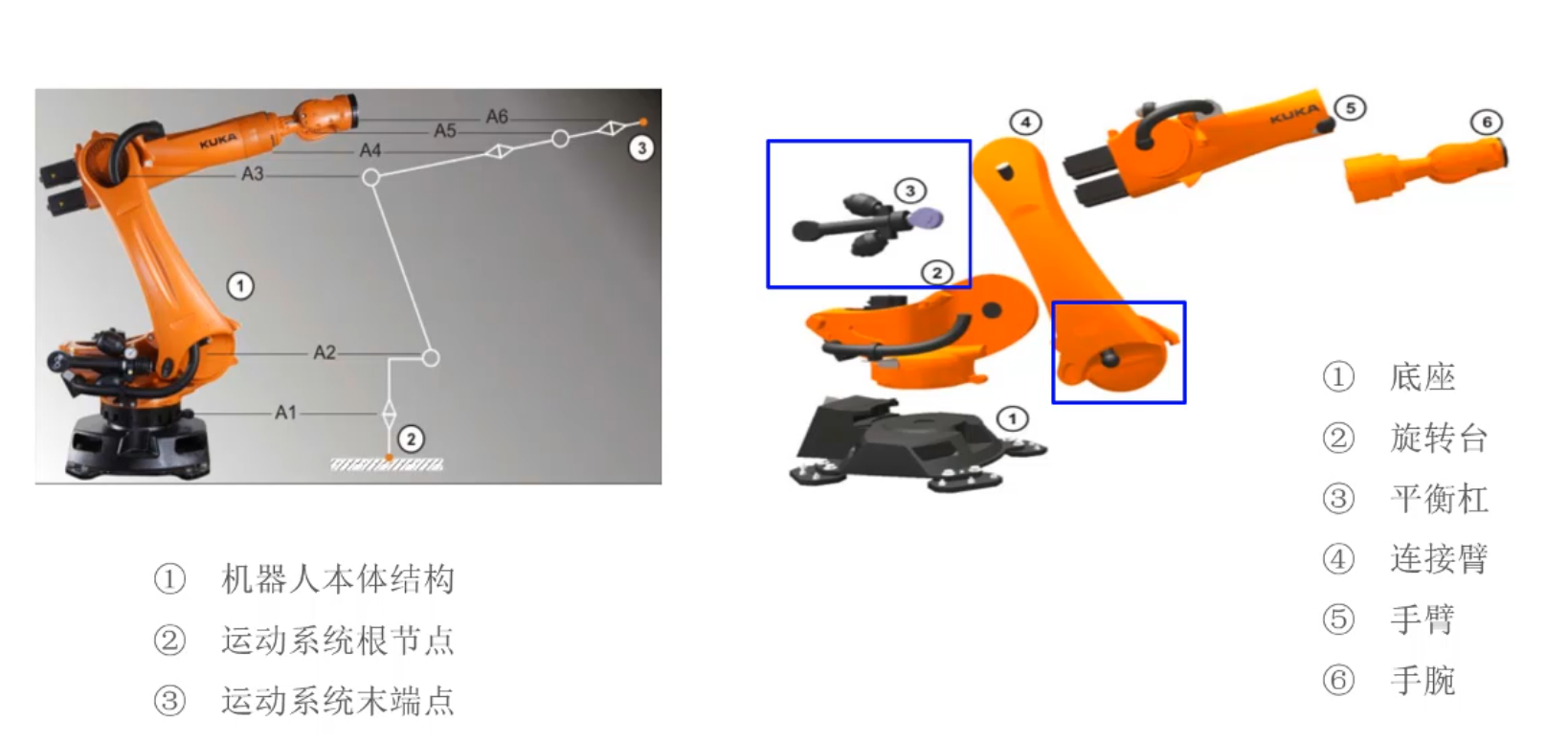
大负载机器人为什么要用平衡缸
2017-08-25 13:03
134 查看
平衡缸是为了防止J1这个关节的负载过大(当机器人伸的太远,J1吃不消则靠平衡缸拉一把,当机器人收的太里面,J1又吃不消靠平衡缸推一把)
有平衡缸的大负载机器人不允许机器人非常规安装方式(比如侧装或者倒装都是不允许的)
有平衡缸的大负载机器人不允许机器人非常规安装方式(比如侧装或者倒装都是不允许的)

相关文章推荐
- 大负载机器人为什么要用平衡缸
- 为什么平衡对游戏数值策划如此重要
- Redis为什么用跳表而不用平衡树?
- 为什么7层负载均衡压测性能低
- dubbo与nginx都可以做负载均衡,然而哪个相对来说更优秀?为什么?
- 为什么制造机器人这么难
- apache+tomcat+mysql 的负载平衡和集群技术(转)
- 负载平衡的网络转发技术
- 简化操作之自动负载平衡的设置
- 系统设计之负载平衡介绍
- 实验:静态路由的负载平衡
- dubbo与nginx都可以做负载均衡,然而哪个相对来说更优秀?为什么?
- Kafka中topic的Partition,Kafka为什么这么快,Consumer的负载均衡及consumerGroup的概念(来自学习笔记)
- 基于STM32的平衡车机器人设计-硬件电路设计
- 《物联网框架ServerSuperIO教程》-20.网络通讯控制器分组,提高交互的负载平衡能力。v3.6.6 版本发布
- Redis 为什么用跳表而不用平衡树
- 深度|为什么机器人会变坏?
- 为什么平衡对游戏数值策划如此重要
- Hashmap为什么容量是2的幂次,什么是负载因子